一种VFD阵列点焊装置的制作方法
一种vfd阵列点焊装置
技术领域
1.本技术涉及点焊设备的领域,尤其是涉及一种vfd阵列点焊装置。
背景技术:
2.vfd有一部分结构是由四根支片相互焊接而成的框体。
3.目前,在对四根支片焊接前,操作人员需要将四根支片放置于放置板上,随后将放置板以及四根支片放置于点焊装置本体处进行焊接,完成焊接。
4.针对上述中的相关技术,发明人认为存在有以下缺陷:通过人工将放置板以及四根支片运输至点焊装置本体处,不方便操作人员的操作。
技术实现要素:
5.为了方便操作人员将放置板以及四根支片运输至点焊装置本体处,本技术提供一种vfd阵列点焊装置。
6.本技术提供的一种vfd阵列点焊装置采用如下的技术方案:一种vfd阵列点焊装置,包括机架,所述机架上设置有点焊装置本体以及用于将工件送入点焊装置本体内的送料组件,所述送料组件包括转动盘、用于带动转动盘转动的驱动电机以及若干用于将工件限位于转动盘上的限位件,所述转动盘转动连接于机架上,所述限位件设置于转动盘上。
7.通过采用上述技术方案,使用时,操作人员将四个支片放置于转动盘上的限位件上,随后驱动电机带动转动盘转动,使得转动盘上的四个支片转动至点焊装置本体内进行点焊,实现将四个支片移动至点焊装置本体内,方便操作人员的操作,提高工作的效率。
8.可选的,所述机架上设置有若干安全组件,所述安全组件包括红外光栅以及控制器,所述驱动电机包括步进电机;所述红外光栅与控制器电连接,所述控制器与驱动电机电连接,当所述红外光栅内未检测到物体时所述控制器控制驱动电机转动固定角度。
9.通过采用上述技术方案,在操作人员将四个支片放置于限位件上时,红外光栅检测到物体,并将电信号传送至控制器,控制器将电信号传送至驱动电机,并控制驱动电机停止转动,当若干红外光栅均未检测到物体时,红外光栅将电信号传送至控制器,控制器再将电信号传送至驱动电机,并控制驱动电机转动一定角度,使得四个支片转动入点焊装置本体内,提高操作人员在操作时的安全性。
10.可选的,所述限位件包括若干定位杆、放置板以及用于带动放置板沿远离转动盘的方向移动的驱动气缸;若干所述定位杆一端固定连接于转动盘上,所述放置板沿靠近或远离转动盘的方向滑移连接于转动盘上,所述定位杆滑移穿设于放置板上,所述定位杆穿出放置板,若干所述定位杆之间形成对工件限位的空间。
11.通过采用上述技术方案,使用时,操作人员将四个支片放置于若干定位杆之间,在点焊装置本体将四个支片焊接完成后,驱动气缸带动放置板沿远离转动盘的方向移动,使得四个焊接完成后的支片从若干定位杆处脱出,方便操作人员将支片从定位杆上拔出出
料。
12.可选的,所述机架上设置有用于将放置板上的工件取出的取出组件,所述取出组件包括两个升降板、滑移杆、电磁铁、用于维持滑移杆初始状态的维持弹簧、用于带动滑移杆转动的带动电机以及用于带动滑移杆移动的驱动结构;所述滑移杆竖向滑移连接于机架上,两个所述升降板均设置于滑移杆上,所述升降板位于放置板正上方,所述电磁铁设置于升降板下端面,所述电磁铁用于将工件进行吸附。
13.通过采用上述技术方案,使用时,驱动结构带动滑移杆沿竖直向下的方向移动,使得升降板沿靠近限位件的方向移动,电磁铁得电将放置板上的工件进行吸附,随后带动电机带动滑移杆转动180度,使得升降板将工件进行出料,方便操作人员的操作。
14.可选的,所述驱动结构包括主动齿条、从动齿条以及换向齿轮;所述主动齿条长度方向与滑移杆长度方向平行,所述主动齿条下端设置于驱动气缸的活塞杆上,所述从动齿条上端设置于升降板上,所述换向齿轮转动连接于机架上且位于主动齿条与从动齿条之间,所述主动齿条以及从动齿条均与换向齿轮相啮合。
15.通过采用上述技术方案,使用时,驱动气缸带动放置板沿远离转动盘的方向移动,使得驱动气缸上的主动齿条沿竖直向上的方向移动,随后主动齿条通过换向齿轮以及从动齿条的带动滑移杆沿竖直向下的方向移动,升降板沿靠近工件的方向移动,使得电磁铁能将工件进行吸附,实现在驱动气缸将工件从若干定位柱上拔出的同时,实现将升降板沿靠近工件的方向移动,使得升降板将工件吸附出料,方便操作人员的操作。
16.可选的,所述升降板上设置有用于带动若干支片进行上料的上料组件,所述上料组件包括阻挡外框、阻挡内框、上阻挡块、下阻挡块以及推动件;所述升降板下端面开设有供支片通过的出料通孔,所述阻挡外框设置于升降板上端面,所述阻挡内框位于阻挡外框内,所述阻挡内框设置于升降板上端面,所述出料通孔位于阻挡内框内,所述阻挡内框上开设有供单片支片通过的连通通孔;所述上阻挡块设置于所述阻挡内框内,所述下阻挡块设置于上阻挡块下端面,所述下阻挡块与上阻挡块之间形成用于对支片进行限位的限位空间,所述推动件用于将支片从阻挡外框与阻挡内框之间推动至限位空间内,所述升降板上设置有用于将支片限位于限位空间内并将支片推动至放置板上的限位组件。
17.通过采用上述技术方案,使用时,操作人员将四个支片分别放置于阻挡外框与阻挡内框之间,随后推动件将阻挡外框与阻挡内框之间的支片通过连通通孔推动至限位空间内,随后限位组件、上阻挡块以及下阻挡块将四个支片限位于限位空间内,随后限位组件将限位空间内的实现将四个支片放置于放置板上,方便操作人员的操作。
18.可选的,所述推动件包括推动板以及用于带动推动板沿靠近限位空间的方向移动的推动结构,所述推动板沿靠近或远离连通通孔的方向滑移连接于阻挡外框上。
19.通过采用上述技术方案,在需要将阻挡外框与阻挡内框之间的支片送入至限位空间内时,推动结构带动推动板沿靠近连通通孔的方向移动,使得推动板带动阻挡外框与阻挡内框之间的最底下的支片通过连通通孔送入至限位空间内,方便操作人员的操作。
20.可选的,所述推动结构包括固定块以及用于带动推动板复位的复位弹簧;所述固定块设置于机架上,所述固定块上开设有用于带动推动板沿靠近连通通孔的方向移动的导向斜面。
21.通过采用上述技术方案,使用时,驱动气缸带动升降板沿竖直向下的方向移动,使
得推动板与导向斜面相抵触,导向斜面使得推动板沿靠近连通通孔的方向移动,随后驱动气缸再将升降板沿竖直向上的方向移动,复位弹簧将推动板复位,随后带动电机带动滑移杆转动180度使得出料的升降板与上料的升降板互换,驱动气缸再次带动升降板沿竖直向下的方向移动,随后电磁铁失电,使得焊接完成的工件进行出料,靠近工件的升降板将位于限位空间内的四个支片进行上料,实现在驱动气缸带动两个升降板沿竖直向下的方向移动的同时,实现带动其中一个远离工件的升降板上的推动板沿靠近连通通孔的方向移动,在实现对升降板进行竖向移动并将焊接完成的工件吸附出料的同时,实现将其中一个远离工件的升降板进行四个支片的进料。
22.可选的,所述限位组件包括推出气缸、转动板以及用于将转动板复位的复位扭簧;所述推出气缸一端设置于阻挡内框上,所述推出气缸另一端设置于上阻挡块上,所述转动板一端转动连接于升降板下端面,所述转动板用于将出料通孔阻挡,所述电磁铁设置于转动板上。
23.通过采用上述技术方案,在需要将限位空间内的四个支片放置于放置板上时,推出气缸带动上阻挡块、下阻挡块以及四个支片沿竖直向下的方向移动,上阻挡块、下阻挡块以及四个支片推动转动板沿远离工件的方向移动,复位扭簧使得转动板将四个支片限位于限位空间内,直至转动板转动至竖直状态时,上阻挡块以及下阻挡块将四个支片压入出若干转动板,并最后将四个支片放置于放置板上,实现对四个支片的上料过程。
24.可选的,所述上阻挡块下端面开设有滑移槽,所述下阻挡块滑移连接于滑移槽内,所述下阻挡块与滑移槽槽底之间设置有避让弹簧,所述避让弹簧一端设置于滑移槽的槽底,所述避让弹簧另一端设置于下阻挡块上。
25.通过采用上述技术方案,使用时,下阻挡块与放置板相抵触,随后上阻挡块继续沿竖直向下的方向移动,使得四个支片完全压入若干定位柱上,进一步方便操作人员对四个支片的上料。
26.综上所述,本技术包括以下至少一种有益技术效果:1.通过送料组件方便操作人员将四个支片放置于转动盘上并将四个支片送入至点焊装置本体内进行点焊;2.通过限位件方便操作人员将四个支片限位于若干定位杆之间,方便操作人员将四个支片从若干定位杆之间拔出出料;3.通过上料组件以及限位组件实现在将四个支片进行上料并将焊接完成的工件进行出料,方便操作人员的操作。
附图说明
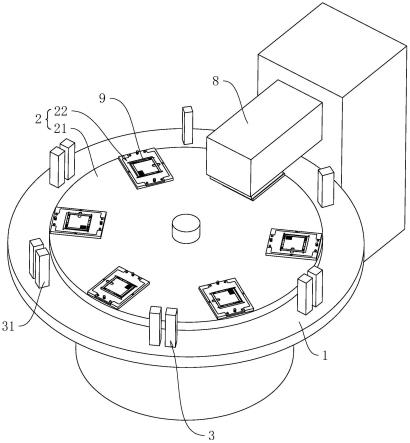
27.图1是本技术的实施例1的结构示意图。
28.图2是图1中限位件的结构示意图。
29.图3是图2中隐藏放置板后的结构示意图。
30.图4是本技术的实施例2的结构示意图。
31.图5是图4中取出组件的结构示意图。
32.图6是图5中a处的放大图,用于展示驱动结构。
33.图7是图5中带动电机与滑移杆的连接结构。
34.图8是图5中上料组件的结构。
35.图9是图8中b-b的剖视图,用于展示上料组件的结构。
36.图10是图9中c处的放大图,用于展示限位空间以及连通通孔。
37.附图标记:1、机架;2、送料组件;21、转动盘;22、限位件;221、定位杆;222、安装板;223、放置板;224、驱动气缸;225、移动槽;226、连接架;3、安全组件;31、红外光栅;4、取出组件;41、升降板;42、龙门架;43、水平杆;44、滑移杆;45、电磁铁;46、维持弹簧;47、带动电机;48、驱动结构;481、主动齿条;482、从动齿条;483、换向齿轮;49、转动杆;5、上料组件;51、阻挡外框;52、阻挡内框;53、连接柱;54、上阻挡块;55、下阻挡块;56、推动件;561、推动板;562、推动结构;5621、固定块;5622、固定架;5623、复位弹簧;563、避让弹簧;57、连通通孔;58、出料通孔;59、滑移槽;6、限位组件;61、推出气缸;62、固定板;63、转动板;64、复位扭簧;65、排出通孔;66、导向斜面;7、限位空间;8、点焊装置本体;9、支片。
具体实施方式
38.以下结合附图1-10对本技术作进一步详细说明。
39.本技术实施例公开一种vfd阵列点焊装置。
40.实施例1参照图1以及图2,一种vfd阵列点焊装置包括机架1,机架1上固定连接有点焊装置本体8以及用于将工件送入点焊装置本体8内的送料组件2,送料组件2包括转动盘21、用于带动转动盘21转动的驱动电机以及若干用于将工件限位于转动盘21上的限位件22,驱动电机包括步进电机;转动盘21水平设置,转动盘21转动连接于机架1上端面,步进电机固定连接于机架1上,步进电机的输出轴与转动盘21同轴固定连接。
41.参照图1以及图2,机架1上设置有五个安全组件3,安全组件3包括红外光栅31以及控制器;放置板223位于红外光栅31之间,控制器固定连接于机架1上,放置板223与红外光栅31电连接,控制器与步进电机电连接。
42.参照图2以及图3,限位件22包括若干定位杆221、安装板222、放置板223以及用于带动放置板223沿远离转动盘21的方向移动的驱动气缸224;安装板222水平固定连接于转动盘21上端面,安装板222上端面开设有供放置板223滑移的移动槽225,若干定位杆221竖直设置,若干定位杆221下端均固定连接于移动槽225的槽底,若干定位杆221之间形成供四个支片9限位的空间;放置板223滑移连接于移动槽225内,定位杆221贯穿放置板223;驱动气缸224竖直设置,驱动气缸224位于放置板223正下方,驱动气缸224固定连接于机架1上,驱动气缸224的活塞杆上固定连接有连接架226,连接架226上端用于与放置板223下端面相抵触。
43.实施例1的实施原理为:使用时,操作人员人工将四个支片9放置于放置板223上,在操作人员放置时,红外光栅31检测到有物体,红外光栅31将电信号传输至控制器,控制器将电信号传输至步进电机处并控制步进电机停止转动,在操作人员将四个支片9完全放置于放置板223上后,红外光栅31检测到无物体,红外光栅31将电信号传输至控制器,控制器将电信号传输至步进电机处并控制步进电机间歇转动六十度,在步进电机带动转动盘21间歇转动的同时点焊装置本体8对放置板223上的四个支片9进行焊接。
44.实施例2
参照图4以及图5,本实施例与实施例1的不同之处在于:机架1上设置的安全组件3替换为取出组件4,取出组件4包括两个升降板41、龙门架42、水平杆43、滑移杆44、电磁铁45、用于维持滑移杆44初始状态的维持弹簧46、用于带动滑移杆44转动的带动电机47以及用于带动滑移杆44移动的驱动结构48;滑移杆44竖直设置,滑移杆44下端滑移连接于机架1上,滑移杆44位于转动盘21一侧;维持弹簧46套设于滑移杆44上,维持弹簧46上端固定连接于滑移杆44上,维持弹簧46下端固定连接于机架1上端面;滑移杆44通过驱动结构48与驱动气缸224相连。
45.参照图5以及图6,驱动结构48包括主动齿条481、从动齿条482以及换向齿轮483;主动齿条481竖直设置,主动齿条481下端固定连接于连接架226上,从动齿条482竖直设置,从动齿条482上端通过水平板484于滑移杆44上,水平板484水平转动连接于滑移杆44上且与滑移杆44沿竖直方向卡接,换向齿轮483位于主动齿条481与从动齿条482之间,换向齿轮483转动连接于机架1上,换向齿轮483均与主动齿条481以及从动齿条482相啮合。
46.参照图5以及图7,龙门架42固定连接于机架1上端面,带动电机47固定连接于龙门架42上端面,带动电机47的输出轴竖直向下贯穿龙门架42,带动电机47的输出轴固定连接有截面为方形的转动杆49,转动杆49下端竖向滑移连接于滑移杆44上端。
47.参照图5以及图8,水平杆43固定连接于滑移杆44上,两个升降板41分别位于水平杆43两侧,升降板41水平固定连接于水平杆43的一端,升降板41上端面设置有用于将四个支片9上料的上料组件5,上料组件5包括阻挡外框51、四个连接柱53、阻挡内框52、上阻挡块54、下阻挡块55以及推动件56;四个连接柱53均竖直设置,四个连接柱53均固定连接于升降板41上端面;阻挡外框51固定连接于升降板41上端面,阻挡外框51套设于四个连接柱53上;阻挡内框52位于四个连接柱53之间,阻挡内框52固定连接于四个连接柱53侧壁上。
48.参照图8以及图9,阻挡内框52靠近升降板41的一端开设有供单片支片9通过的连通通孔57,升降板41下端面开设有出料通孔58,上阻挡块54通过限位组件6安装于阻挡内框52上,限位组件6包括推出气缸61、固定板62、转动板63以及用于将转动板63复位的复位扭簧64;固定板62水平设置,固定板62固定连接于阻挡内框52的上端面;推出气缸61竖直设置,推出气缸61的缸体固定连接于固定板62下端面,推出气缸61的活塞杆固定连接于上阻挡块54上端面,上阻挡块54下端面开设有滑移槽59,下阻挡块55滑移连接于滑移槽59内,下阻挡块55与滑移槽59的槽底之间设置有避让弹簧563,避让弹簧563上端固定连接于滑移槽59的槽底,避让弹簧563下端固定连接于下阻挡块55上端面;转动板63一端转动连接于升降板41下端面,转动板63另一端用于阻挡出料通孔58内的支片9;复位扭簧64一端固定连接于转动板63上,复位扭簧64另一端固定连接于升降板41上,电磁铁45固定连接于转动板63下端面。
49.参照图9以及图10,上阻挡块54、转动板63、升降板41以及下阻挡块55之间形成供支片9限位的限位空间7。
50.参照图8以及图9,推动件56包括四个推动板561以及用于带动推动板561沿靠近限位空间7的方向移动的推动结构562,推动结构562包括固定块5621、固定架5622以及用于带动推动板561复位的复位弹簧5623;推动板561水平设置,推动板561沿靠近或远离连通通孔57的方向滑移连接于阻挡外框51侧壁上;复位弹簧5623位于阻挡外框51外侧,复位弹簧5623一端固定连接于推动板561上,复位弹簧5623另一端固定连接于阻挡外框51外侧壁上;
固定架5622固定连接于机架1上端面,固定架5622上端面开设有供焊接完成的工件通过的排出通孔65,固定块5621固定连接于固定架5622上端面,固定块5621上端面与固定块5621靠近排出通孔65的端面之间开设有导向斜面66,导向斜面66位于推动板561下方并与推动板561远离连通通孔57的一端相抵触。
51.实施例2的实施原理为:使用时,将支片9放置于阻挡外框51与阻挡内框52之间,驱动气缸224通过连接架226带动放置板223沿远离转动盘21的方向移动,使得放置板223上焊接完成的工件从若干定位杆221上脱出,在驱动气缸224带动连接架226上升的同时,驱动气缸224通过主动齿条481、换向齿轮483以及从动齿条482带动滑移杆44沿竖直向下的方向移动。
52.滑移杆44竖直向下移动的同时带动两个升降板41竖直向下移动,靠近焊接完成工件的升降板41竖直向下移动使得电磁铁45靠近焊接完成的工件,随后电磁铁45得电使得焊接完成的工件吸附于电磁铁45上;远离焊接完成工件的升降板41竖直向下移动使得固定块5621上的导向斜面66带动推动板561沿靠近连通通孔57的方向移动,推动板561将位于阻挡外框51与阻挡内框52之间的支片9推动至限位空间7内,实现在对焊接完成的工件进行出料的同时实现将四个支片9进行进料。
53.随后驱动气缸224通过驱动结构48带动升降板41沿竖直向上的方向移动,使得升降板41位于固定块5621的上方,随后带动电机47带动滑移杆44转动180度,使得两个升降板41位置调换,驱动气缸224再次带动两个升降板41沿竖直向下的方向运动,焊接完成的工件通过排出通孔65进行出料,在升降板41沿竖直向下方向运动的同时导向斜面66与推动板561相抵触,实现上料;另一个升降板41上的推出气缸61带动上阻挡块54以及下阻挡块55沿竖直向下的方向移动,使得位于限位空间7内的四个支片9沿穿出出料通孔58的方向移动,复位扭簧64通过转动板63将四个支片9限位于上阻挡板与下阻挡板之间,随后下阻挡块55与放置板223相抵触,上阻挡块54继续移动并将四个支片9压入至若干定位杆221之间,实现上料的过程。
54.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1