一种带有检测功能的光伏焊带收线机的制作方法
1.本发明涉及光伏焊带收线机技术领域,尤其涉及一种带有检测功能的光伏焊带收线机。
背景技术:
2.光伏焊带的生产过程是由压延设备对铜材压延成型,再经镀锡设施如镀锡槽镀锡,而后由光伏焊带复绕机绕复在绕线盘上,得到可付诸使用的成品光伏焊带,由于光伏焊带的表面结合有锡层,因而业界习惯将其称之为镀锡铜带或涂锡铜带,是互联条的上位概念,用于太阳能光伏组件的电池片之间的电气连接;
3.由于生产工艺常常会导致光伏焊带表面的锡层过量或过少,造成光伏焊带产生锡珠或漏铜的现象,现有的光伏焊带收线机只能对光伏焊带进行收线功能较为单一,无法在收线牵引光伏焊带的同时感应光伏焊带两面缺陷信息,且无法对光伏焊带两面的缺陷信息进行多层分析、处理、判定的过程,使现有光伏焊带收线机的智能化程度较低;
4.针对上述的技术缺陷,现提出一种解决方案。
技术实现要素:
5.本发明的目的在于:在拉伸牵引收线筒收卷光伏焊带的基础上,还实现在收卷光伏焊带的过程中对光伏焊带的两面的情况进行同步感应并生成对应参数,然后对其参数进行分析、处理,实现光伏焊带双面缺陷感应、警报的功能并自动切换收卷筒,在此过程无需人工值守,同时通过对数据的深度优化、分析处理,从而在收卷完一筒光伏焊带后直接对其进行质量综合评价并标定,实现每筒光伏焊带的质量检测和评定的功能,使本发明的功能更加的强大,更加的智能。
6.为了实现上述目的,本发明采用了如下技术方案:
7.一种带有检测功能的光伏焊带收线机,包括l形支撑板,所述l形支撑板的底部对称固定安装有腿板,所述腿板放置于底面,用于支撑整个机器,所述l形支撑板的平面安装有控制面板,所述控制面板安装有启动按钮、收卷按钮、警报灯和显示面板,所述l形支撑板的立面安装有电动转盘和升降结构,所述电动转盘嵌设于l形支撑板的立面内并与其转动连接,且电动转盘转动安装有电动转杆,所述电动转杆的外端安装有收线筒,所述电动转杆远离电动转盘的端部开设有螺纹段,所述电动转杆的螺纹段螺纹套接有锁止螺套,所述锁止螺套与收线筒抵接设置,所述收线筒设有多个,所述收线筒以电动转盘的圆心为中心并按环形阵列分布;
8.所述升降结构的输出端安装有拉伸触感组件,所述拉伸触感组件的顶端安装有立式曲颈板,所述立式曲颈板转动连接有第一双触感筒和第二双触感筒,所述第一双触感筒设于第二双触感筒的下方,所述立式曲颈板的末端部通过转轴转动设有牵引橡皮筒,所述牵引橡皮对称设有两个,且两个牵引橡皮抵接设置,所述第二双触感筒设于牵引橡皮筒和第一双触感筒之间,且第一双触感筒和第二双触感筒的侧面均与立式曲颈板的侧面滑动抵
接,所述第一双触感筒传动连接有感应其表面的振动信息的第一振感结构,所述第一双触感筒传动连接有感应其表面的振动信息的第二振感结构,其中振动信息包括振动频率和振动幅度。
9.进一步的,所述拉伸触感组件包括总压感应缸体,所述总压感应缸体的侧面与升降结构的输出端固定连接,所述总压感应缸体内设有总压力传感器、感应弹块和感应滑块,所述总压感应缸体固定设于总压感应缸体的底部,所述感应弹块设于总压力传感器和感应滑块之间并与其抵接,所述感应滑块滑动设于总压感应缸体内,所述感应滑块远离感应弹块的四个拐角处固定连接有支撑滑杆,所述支撑滑杆远离感应滑块的一端滑动贯穿总压感应缸体的内壁延伸到其外部并固定连接有连接块,所述连接块的顶面中心处与立式曲颈板固定连接。
10.进一步的,所述第一振感结构包括第一触感杆,所述第一触感杆的外端与第一双触感筒的内端转动套接,所述第一触感杆与立式曲颈板滑动连接,所述立式曲颈板开设有适配第一触感杆滑动的直线滑道,所述第一触感杆远离第一双触感筒的一端滑动贯穿直线滑道延伸到立式曲颈板的另一侧面并固定套设有第一限位滑套,所述第一限位滑套的侧面与第一限位滑套的另一侧面滑动抵接,所述第一限位滑套的外端对称固定连接有支撑杆,所述支撑杆的外端套设有支撑弹簧,所述支撑杆适配有第一振动感应组件,且第一振动感应组件安装于立式曲颈板上。
11.进一步的,第一振动感应组件包括第一触感滑杆,所述第一触感滑杆与支撑杆焊接固定,所述第一触感滑杆远离支撑杆的一端固定连接有第一限位滑块,所述第一限位滑块的外端滑动套设有第一触感缸体,所述第一触感缸体内设有顶触感弹块和第一振动传感器,所述第一振动传感器固定设于第一触感缸体内,所述顶触感弹块设于第一振动传感器与第一限位滑块之间,所述第一触感滑杆滑动贯穿第一触感缸体,所述支撑弹簧的两端与第一限位滑套和第一触感缸体抵接。
12.进一步的,所述第二振感结构包括第二触感杆,所述第二触感杆的外端与第二双触感筒的内端转动套接,所述第二触感杆与立式曲颈板滑动连接,所述立式曲颈板开设有适配第二触感杆滑动的曲形滑道,所述第二触感杆远离第二双触感筒的一端滑动贯穿曲形滑道延伸到立式曲颈板的另一侧面并固定套设有第二限位滑套,所述第二限位滑套的侧面与第二限位滑套的另一侧面滑动抵接,所述第二限位滑套的外端对称铰接有铰接弹簧,所述铰接弹簧适配有第二振动感应组件,且第二振动感应组件安装于立式曲颈板上。
13.进一步的,所述第二振动感应组件包括第二触感滑杆,所述第二触感滑杆的一端与铰接弹簧铰接,所述第二触感滑杆的另一端固定连接有第二限位滑块,所述第二限位滑块的外端滑动抵接有第二触感缸体,所述第二触感缸体内设有底触感弹块和第二振动传感器,所述第二振动传感器固定设于第二触感缸体顶部,所述底触感弹块和第二振动传感器套设于第二触感滑杆的外端,且底触感弹块设于第二振动传感器与第二限位滑块之间,所述第二触感滑杆滑动贯穿第二触感缸体。
14.进一步的,控制面板包括:
15.数据储存单元,用于接收第一双触感筒表面的振动信息和第二双触感筒表面的振动信息并储存;
16.基础警报单元,通过数据储存单元实时获取第一双触感筒表面的振动信息和第二
双触感筒表面的振动信息并生成第一基础警报因子和第二基础警报因子,还将其分别与基础警报预设值进行对比,并生成第一基础警报信号或第二基础警报信号,当生成第一基础警报信号或第二基础警报信号后立即控制部件工作,同步对应编辑警报文本;还将实时生成的第一基础警报因子和第二基础警报因子发送到数据储存单元储存;
17.深度检测单元,用于获取第一基础警报因子和第二基础警报因子进行标准差求和再平均计算得到光伏焊带的偏差因子,且将生成的光伏焊带的偏差因子与评估阈值进行比较;当光伏焊带偏差因子小于评估阈值最小值时,则生成编辑字符为“优”的第一评估信号;当光伏焊带偏差因子不小于评估阈值最大值时,则生成编辑字符为“差”的第二评估信号;当光伏焊带偏差因子不小于评估阈值最小值时,且光伏焊带偏差因子小于评估阈值最大值时,则生成编辑字符为“良”的第三评估信号。
18.进一步的,基础警报单元的具体处理过程如下:
19.基础警报单元通过数据储存单元实时获取第一双触感筒表面的振动信息和第二双触感筒表面的振动信息并对应生成第一基础警报因子和第二基础警报因子;
20.还将实时生成的第一基础警报因子和第二基础警报因子分别与基础警报预设值进行比较:
21.当第一基础警报因子或第二基础警报因子不小于基础警报预设值时,则生成第一基础警报信号或第二基础警报信号;
22.当第一基础警报信号或第二基础警报信号产生后立即控制收线筒停止工作,且控制警报灯闪烁,并对应分别编辑“顶面出现质量问题”的第一基础警报文本或“底面出现质量问题”的第二基础警报文本;
23.且将第一基础警报文本或第二基础警报文本发送到显示屏幕;
24.当第一基础警报因子或第二基础警报因子小于基础警报预设值时,则不生成基础警报信号;
25.且将生成的第一基础警报因子和第二基础警报因子发送到数据储存模块储存;
26.当第一基础警报信号或第二基础警报信号生成后控制收线筒收线预设长度后再将光伏焊带剪断,然后控制电动转盘工作并自动切换收线筒重新收卷光伏焊带,从而实现无人值收自动感应切换的功能。
27.进一步的,第一基础警报因子生成的具体过程:将第一双触感筒表面的振动信息内的振动频率值和振动幅度值分别标定为zp1和zf1,然后依据公式jy1=k1*zp1+zf1,得到第一基础警报因子jy1;第二基础警报因子生成的具体过程:将第二双触感筒表面的振动信息内的振动频率值和振动幅度值分别标定为zp2和zf2,然后依据公式jy2=k2*zp2+zf2,得到第二基础警报因子jy2;k1、k2均为振动频率值与振动幅度值之间的权重修正常数。
28.综上所述,由于采用了上述技术方案,本发明的有益效果是:
29.本发明在拉伸牵引收线筒收卷光伏焊带的基础上,还实现在收卷光伏焊带的过程中对光伏焊带的两面的情况进行同步感应并生成对应参数,然后对其参数进行分析、处理,实现光伏焊带双面缺陷感应、警报的功能并自动切换收卷筒,在此过程无需人工值守,同时通过对数据的深度优化、分析处理,从而在收卷完一筒光伏焊带后直接对其进行质量综合评价并标定,实现每筒光伏焊带的质量检测和评定的功能,使本发明的功能更加的强大,更加的智能,解决了传统光伏焊带收线机只能对光伏焊带进行收线功能较为单一,无法在收
线牵引光伏焊带的同时感应光伏焊带两面缺陷信息,且无法对光伏焊带两面的缺陷信息进行多层分析、处理的过程,造成现有光伏焊带收线机的智能化程度较低的问题。
附图说明
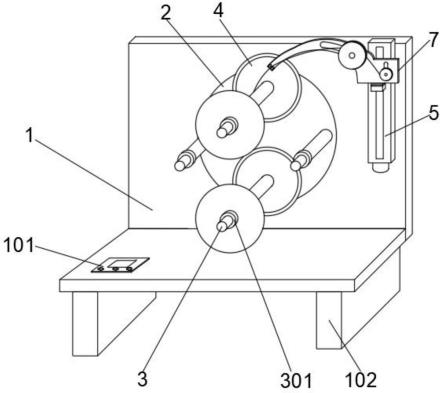
30.图1示出了本发明的立体图;
31.图2示出了立式曲颈板处的立体放大图;
32.图3示出了总压感应缸体处的剖面放大图;
33.图4示出了立式曲颈板处的另一侧面图;
34.图5示出了第一触感缸体处的剖面放大图;
35.图6示出了第二触感缸体处的剖面放大图;
36.图7示出了本发明的流程图;
37.图例说明:1、l形支撑板;2、电动转盘;3、电动转杆;4、收线筒;5、升降结构;6、拉伸触感组件;7、立式曲颈板;8、第一双触感筒;9、第二双触感筒;10、牵引橡皮筒;101、控制面板;102、腿板;301、锁止螺套;601、总压感应缸体;602、总压力传感器;603、感应弹块;604、感应滑块;605、支撑滑杆;606、连接块;701、直线滑道;702、曲形滑道;801、第一触感杆;802、第一限位滑套;803、支撑杆;804、支撑弹簧;805、第一触感缸体;806、第一限位滑块;807、顶触感弹块;808、第一振动传感器;809、第一触感滑杆;901、第二触感杆;902、第二限位滑套;903、铰接弹簧;904、第二触感缸体;905、第二限位滑块;906、第二触感滑杆;907、底触感弹块;908、第二振动传感器。
具体实施方式
38.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
39.实施例1:
40.如图1-7所示,一种带有检测功能的光伏焊带收线机,包括l形支撑板1,l形支撑板1的底部对称固定安装有腿板102,腿板102放置于底面,用于支撑整个机器,l形支撑板1的平面安装有控制面板101,控制面板101安装有启动按钮、收卷按钮、警报灯和显示屏幕,启动按钮用于启动设备作业,l形支撑板1的立面安装有电动转盘2和升降结构5,电动转盘2嵌设于l形支撑板1的立面内并与其转动连接,且电动转盘2转动安装有电动转杆3,电动转杆3的外端安装有收线筒4,电动转杆3远离电动转盘2的端部开设有螺纹段,电动转杆3的螺纹段螺纹套接有锁止螺套301,锁止螺套301与收线筒4抵接设置,收线筒4设有多个,收线筒4以电动转盘2的圆心为中心并按环形阵列分布,当旋下锁止螺套301时,即可将收卷完光伏焊带的收线筒4取出并更换,当旋紧锁止螺套301时,则将收线筒4锁固,使收线筒4便于拆装,使卷线更加方便,设置多个收线筒4逐步交替收卷光伏焊带,从而提高收卷光伏焊带的效率;
41.升降结构5的输出端安装有拉伸触感组件6,拉伸触感组件6用于感应光伏焊带的预设压力和收卷光伏焊带的拉伸力,升降结构5用于控制拉伸触感组件6升降,拉伸触感组
件6的顶端安装有立式曲颈板7,立式曲颈板7转动连接有第一双触感筒8和第二双触感筒9,第一双触感筒8设于第二双触感筒9的下方,立式曲颈板7的末端部通过转轴转动设有牵引橡皮筒10,牵引橡皮对称设有两个,且两个牵引橡皮抵接设置,第二双触感筒9设于牵引橡皮筒10和第一双触感筒8之间,且第一双触感筒8和第二双触感筒9的侧面均与立式曲颈板7的侧面滑动抵接,第一双触感筒8、第二双触感筒9和牵引橡皮筒10配合将光伏焊带牵引指向指定位置,即牵引指向收线筒4处,从而便于收线筒4的收卷,降低光伏焊带的偏移量,使光伏焊带收卷的效果更好,同时第一双触感筒8用于感应光伏焊带其中一面的质量情况,第二双触感筒9感应光伏焊带其中另一面的质量情况,从而感应从光伏焊带双面质量情况;
42.拉伸触感组件6包括总压感应缸体601,当连接块606感应到与其固定的立式曲颈板7给予的压力后,连接块606会带动与其固定的四个支撑滑杆605向与其滑动贯穿的总压感应缸体601内收缩,支撑滑杆605向总压感应缸体601内收缩后会带动与其固定连接的感应滑块604沿总压感应缸体601的内壁滑动并抵接挤压感应弹块603,使感应弹块603收缩,感应弹块603收缩后其反向作用力作用于总压力传感器602,使总压力传感器602感应到感应弹块603反向作用力,从而实时感应到立式曲颈板7的压力值,从而感应到收卷光伏焊带的拉伸力;
43.第一双触感筒8的内端转动套接有第一触感杆801,第一触感杆801与立式曲颈板7滑动连接,立式曲颈板7开设有适配第一触感杆801滑动的直线滑道701,第一触感杆801远离第一双触感筒8的一端滑动贯穿直线滑道701延伸到立式曲颈板7的另一侧面并固定套设有第一限位滑套802,第一触感杆801在直线滑道701内滑动保证第一双触感筒8感应光伏焊带其中一面质量时的稳定性,第一限位滑套802的侧面与第一限位滑套802的另一侧面滑动抵接,第一限位滑套802用于限位第一触感杆801,防止其脱落,第一限位滑套802的外端对称固定连接有支撑杆803,支撑杆803的外端套设有支撑弹簧804,支撑弹簧804的两端与第一限位滑套802和第一触感缸体805抵接,且支撑杆803远离第一限位滑套802的一端通过焊接固定连接有第一触感滑杆809,支撑弹簧804和支撑杆803使设备传动更加的稳定,当第一双触感筒8的外表面受到光伏焊带其中一面给予的挤压力时,第一触感杆801将此压力依次传给第一限位滑套802、支撑杆803,然后支撑杆803将其动力传给予其固定的第一触感滑杆809,第一触感滑杆809感应到力时将此力传递给予其固定连接的第一限位滑块806,使第一限位滑块806的外端沿第一触感缸体805的内腔滑动并挤压与其抵接的顶触感弹块807,当顶触感弹块807被挤压时收缩并将收缩反向作用力作用于第一振动传感器808,使第一振动传感器808感应到顶触感弹块807的反向作用力,从而实时感应到第一双触感筒8的振动频率及其振动幅度,其瞬间振动频率及其振动幅度用于判断光伏焊带其中一面的质量情况,当其振动幅度和振动频率越大,则说明光伏焊带的此面出现异常问题,例如出现光伏焊带此面出现锡珠的现象或者漏铜的现象,简单说就是凹凸不平;
44.第二双触感筒9的内端转动套接有第二触感杆901,第二触感杆901与立式曲颈板7滑动连接,立式曲颈板7开设有适配第二触感杆901滑动的曲形滑道702,第二触感杆901远离第二双触感筒9的一端滑动贯穿曲形滑道702延伸到立式曲颈板7的另一侧面并固定套设有第二限位滑套902,第二限位滑套902的侧面与第二限位滑套902的另一侧面滑动抵接,第二限位滑套902第二触感杆901脱离,保证设备的外端性,当第二双触感筒9的外表面受到光伏焊带其中另二面给予的挤压力时,第二双触感筒9会使第二触感杆901沿曲形滑道702滑
动,第二触感杆901沿曲形滑道702滑动后带动与其固定的第二限位滑套902滑动,第二限位滑套902滑动后其与滑动方向相反会拉动与其铰接的其中一个铰接弹簧903扩张,此铰接弹簧903扩张后带动与其铰接的其中一个第二触感滑杆906从与其滑动贯穿的第二触感缸体904内出来,第二触感滑杆906从与其滑动贯穿的第二触感缸体904内出来后带动与其固定连接的第二限位滑块905在与其外端滑动抵接的第二触感缸体904滑动,第二限位滑块905滑动后使与其抵接的底触感弹块907收缩,底触感弹块907收缩后其反向作用力会挤压第二振动传感器908,此第二振动传感器908被挤压后使其感应到顶触感弹块807的反向作用力,从而实时感应到第二双触感筒9的振动频率及其振动幅度,其瞬间振动频率及其振动幅度用于判断光伏焊带其中另一面的质量情况;
45.其中第一触感缸体805、第一限位滑块806、顶触感弹块807、第一振动传感器808、第一触感滑杆809构成了第一振动感应组件,用于感应光伏焊带其中一面的振动信息,
46.其中第二触感缸体904、第二限位滑块905、第二触感滑杆906、底触感弹块907和第二振动传感器908构成了第二振动感应组件,用于感应光伏焊带其中另一面的振动信息;振动信息为振动频率和振动幅度;
47.控制面板101包括数据储存单元、尺寸测量单元、础警报单元和深度检测单元;
48.工作原理:
49.步骤一,按下启动按钮启动设备后,将收线筒4安装上后,将光伏焊带的一端依次穿过第一双触感筒8的底面、第二双触感筒9的顶面、两个牵引橡皮筒10之间后,然后将光伏焊带的一端部预设长度固定安装于收线筒4上;
50.步骤二,当光伏焊带固定在收线筒4上后,按压收卷按钮后,电动转盘2带动收线筒4定弧度圆周运动后并处于正上方,然后控制与之对应的控制电动转杆3带动收线筒4旋转定圈数后,控制升降结构5自动控制拉伸触感组件6升或降,并通过拉伸触感组件6、立式曲颈板7传动带动第一双触感筒8、第二双触感筒9和牵引橡皮筒10升或降,直到拉伸触感组件6感应达到预设压力值,则关闭升降结构5,此时光伏焊带在第一双触感筒8的底面、第二双触感筒9的顶面、两个牵引橡皮筒10之间被绷直,同时控制收线筒4定速度旋转并收卷光伏焊带;
51.步骤三:在收线筒4收卷光伏焊带的过程中,第一振动感应组件通过第一双触感筒8、第一触感杆801、第一限位滑套802和支撑杆803感应到第一双触感筒8表面的振动信息,同时第二振动感应组件感应到通过第二双触感筒9、第二触感杆901和铰接弹簧903感应到第二双触感筒9表面的振动信息,同时拉伸触感组件6感应到收线筒4收卷光伏焊带的过程中的拉伸力变化量;
52.且将实时感应的第一双触感筒8表面的振动信息和第二双触感筒9表面的振动信息发送到数据储存单元储存;
53.步骤五:尺寸测量单元通过数据储存单元获取收线筒4收卷光伏焊带过程中的速度并将其标定为gv和电动转杆3带动收线筒4旋转定圈数gq,然后依据公式gx=e1*gv*t0+e2*gq,得到收卷的光伏焊带长度gx,当gv变大时,则收卷的速度变大,t0为收卷的时间,gq为已知定值,e1和e2为转化因子,使计算的结构更加地接近真实值;
54.且将生成的收卷的光伏焊带长度gx发送到数据储存单元和显示屏处显示;
55.步骤六:基础警报单元通过数据储存单元实时获取第一双触感筒8表面的振动信
息和第二双触感筒9表面的振动信息并对应生成第一基础警报因子和第二基础警报因子;
56.还将实时生成的第一基础警报因子和第二基础警报因子分别与基础警报预设值进行比较:
57.当第一基础警报因子或第二基础警报因子不小于基础警报预设值时,则生成第一基础警报信号或第二基础警报信号;
58.当第一基础警报信号或第二基础警报信号产生后立即控制收线筒4停止工作,且控制警报灯闪烁,并对应分别编辑“顶面出现质量问题”的第一基础警报文本或“底面出现质量问题”的第二基础警报文本;
59.且将第一基础警报文本或第二基础警报文本发送到显示屏幕,用于提醒工作人员光伏焊带的顶面或者底面出现质量问题;
60.当收线筒4停止工作后显示屏处显示收卷的光伏焊带长度;
61.当第一基础警报因子或第二基础警报因子小于基础警报预设值时,则不生成基础警报信号;
62.且将生成的第一基础警报因子和第二基础警报因子发送到数据储存模块储存;
63.其中第一基础警报因子生成的具体过程:将第一双触感筒8表面的振动信息内的振动频率值和振动幅度值分别标定为zp1和zf1,然后依据公式jy1=k1*zp1+zf1,得到第一基础警报因子jy1;
64.其中第二基础警报因子生成的具体过程:将第二双触感筒9表面的振动信息内的振动频率值和振动幅度值分别标定为zp2和zf2,然后依据公式jy2=k2*zp2+zf2,得到第二基础警报因子jy2;k1、k2均为振动频率值与振动幅度值之间的权重修正常数,权重修正常数使计算的结果更加的接近真实值;
65.当第一基础警报信号或第二基础警报信号生成后控制收线筒收线预设长度后再将光伏焊带剪断,然后控制电动转盘工作并自动切换收线筒重新收卷光伏焊带,从而实现无人值收自动感应切换的功能;
66.步骤七:当收卷完一筒光伏焊带时,深度检测单元通过数据储存单元获取收卷光伏焊带时间段内的第一基础警报因子和第二基础警报因子并分别得到其标准差,且将两个标准差相加并平均得到光伏焊带的偏差因子,且将光伏焊带偏差因子与评估阈值进行比较,当光伏焊带偏差因子小于评估阈值最小值时,则生成第一评估信号;当光伏焊带偏差因子不小于评估阈值最大值时,则生成第二评估信号;当光伏焊带偏差因子不小于评估阈值最小值时,且光伏焊带偏差因子小于评估阈值最大值时,则生成第三评估信号;
67.当生成第一评估信号时,则编辑此筒光伏焊带为“优”的字符;当生成第二评估信号时,则编辑此筒光伏焊带为“差”的字符;当生成第三评估信号时,则编辑此筒光伏焊带为“良”的字符;
68.且将生成的字符发送到显示屏处显示,还可将第一评估信号、第二评估信号和第三评估信号发送到标签打印机处,对此筒光伏焊带进行对应字符的标签化;
69.步骤八:当此筒光伏焊带收卷完成后,控制外接的电动剪刀将光伏焊带剪断,然后将光伏焊带安装到新的收线筒4上,再按压收卷按钮后,使此收线筒4重复步骤二到八后,在此过程中自动或手动取下收卷完成的收线筒4并自动或手动更换新收线筒4,实现更加高效的生产线作业;
70.综合上述技术方案,本发明在拉伸牵引收线筒4收卷光伏焊带的基础上,还实现在收卷光伏焊带的过程中对光伏焊带的两面的情况进行同步感应并生成对应参数,然后对其参数进行分析、处理,实现光伏焊带双面缺陷感应、警报的功能并自动切换收卷筒,在此过程无需人工值守,同时通过对数据的深度优化、分析处理,从而在收卷完一筒光伏焊带后直接对其进行质量综合评价并标定,实现每筒光伏焊带的质量检测和评定的功能,使本发明的功能更加的强大,更加的智能,解决了传统光伏焊带收线机只能对光伏焊带进行收线功能较为单一,无法在收线牵引光伏焊带的同时感应光伏焊带两面缺陷信息,且无法对光伏焊带两面的缺陷信息进行多层分析、处理的过程,造成现有光伏焊带收线机的智能化程度较低的问题;
71.还可将光伏焊带的一端依次穿过第一双触感筒8的顶面、第二双触感筒9的底面、顶面的牵引橡皮筒10的顶端后;
72.综合上述技术方案,本发明在拉伸牵引收线筒收卷光伏焊带的基础上,还实现在收卷光伏焊带的过程中对光伏焊带的两面的情况进行同步感应并生成对应参数,然后对其参数进行分析、处理,实现光伏焊带双面缺陷感应、警报的功能并自动切换收卷筒,在此过程无需人工值守,同时通过对数据的深度优化、分析处理,从而在收卷完一筒光伏焊带后直接对其进行质量综合评价并标定,实现每筒光伏焊带的质量检测和评定的功能,使本发明的功能更加的强大,更加的智能,解决了传统光伏焊带收线机只能对光伏焊带进行收线功能较为单一,无法在收线牵引光伏焊带的同时感应光伏焊带两面缺陷信息,且无法对光伏焊带两面的缺陷信息进行多层分析、处理的过程,造成现有光伏焊带收线机的智能化程度较低的问题;
73.还可将光伏焊带的一端依次穿过第一双触感筒的顶面、第二双触感筒的底面、顶面的牵引橡皮筒的顶端后。
74.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1