一种用于轴类两面圆形焊缝自动焊接装置及操作方法与流程
1.本发明属于电气自动化控制焊接领域,涉及一种轴类圆形焊缝自动焊接装置及操作方法,尤其涉及一种过渡轴与平板、轴套与平板两面圆形焊缝自动焊接装置及操作方法。
背景技术:
2.众所周知,圆形焊缝在各种车辆驾驶室金属骨架上司空见惯,作为车辆驾驶室金属骨架外观上常见的圆形焊缝,在保证焊缝有足够强度的情况下,还需要焊缝美观、漂亮,进而提高驾驶室的外观质量。通常,驾驶室金属骨架上的圆形焊缝是人工焊接的,由于人工焊接时焊缝成型速度和焊接角度不稳定,导致其外观焊缝的一致性难以保证,即使经过修整,也要影响驾驶室的产品质量,与此同时也影响了工作效率,增加了生产成本。
3.为了提高金属类产品上圆形焊缝的外观质量和焊接效率,我们经过多次试验,提供了一种用于轴类两面圆形焊缝自动焊接装置,该装置将过渡轴、平板与轴套固定安装在转台上,转台是利用伺服电机控制旋转的,可同时实现精准的速度与位置控制。同时工作台上安装有两个双轴气缸,每个双轴气缸上各安装一把焊枪和两个磁性限位开关。通过plc控制器检测外部的选择开关位置,确定过渡轴、平板与轴套安装在转台上的位置,然后控制不同双轴气缸的伸出,当双轴气缸伸出到位时,其磁性限位开关将位置信号反馈给plc控制器,plc控制器控制焊枪得电,同时伺服电机以设定好的速度(速度根据圆形焊缝的半径可调)带动转台匀速旋转,转台精准旋转一周后停止,同时焊枪失电双轴气缸缩回,从而实现金属类产品上过渡轴与平板、轴套与平板的两面圆形焊缝自动焊接功能,试验表明取得了良好的使用效果。
技术实现要素:
4.本发明的目的在于提供一种用于轴类两面圆形焊缝自动焊接装置及操作方法,该装置具有结构紧凑、控制先进、使用方便、稳定性好、安全性高、焊接效率和精度高等特点,可用于金属类产品上过渡轴与平板、轴套与平板两面圆形焊缝自动焊接与操作。其操作方法简洁明了,容易掌握,可靠性高,使用效果良好。
5.为达到上述目的,本发明采用的技术方案是:一种用于轴类两面圆形焊缝自动焊接装置,包括:工作台支架1、工作台2、伺服电机3、减速机4、输出轴轴套5、转台6、三爪自定心卡盘7、平板支撑筒8、a面平板支撑柱9、b面平板支撑柱10、a面焊枪11、b面焊枪12、a面双轴气缸13、a面双轴气缸底部磁性限位开关14、a面双轴气缸顶部磁性限位开关15、b面双轴气缸16、b面双轴气缸底部磁性限位开关17、b面双轴气缸顶部磁性限位开关18、控制箱19;其特征在于:工作台2固接在工作台支架1上,伺服电机3与减速机4用螺钉组装固定在一起,通过螺钉将减速机4外壳上自带的法兰固定在工作台2上,减速机4的输出轴通过工作台2预留的圆孔向上伸出,输出轴轴套5套装在减速机4的输出轴上,输出轴轴套5内部的键槽与减速机4的输出轴通过减速机4输出轴配置的平键形成紧密配合连接,输出轴轴套5圆心与转台6圆心对齐后同圆心并焊接在一起,三爪自定心卡盘7圆心与转台6圆心对齐后同圆心并
用螺钉固定在转台6上,转台6右半面安装有四个a面平板支撑柱9,转台6左半面安装有四个b面平板支撑柱10,平板支撑筒8居中落在三爪自定心卡盘7上;a面双轴气缸13通过螺钉固定在两根角钢上,并将角钢焊接在工作台2右上角,b面双轴气缸16通过螺钉固定在两根角钢上,并将角钢焊接在工作台2左上角,同时a面焊枪11、b面焊枪12分别通过压板安装在a面双轴气缸13和b面双轴气缸16活塞杆的顶部;a面双轴气缸底部磁性限位开关14、a面双轴气缸顶部磁性限位开关15分别安装在a面双轴气缸13缸体的底部和顶部,b面双轴气缸底部磁性限位开关17、b面双轴气缸顶部磁性限位开关18分别安装在b面双轴气缸16的底部和顶部;伺服电机3、a面双轴气缸底部磁性限位开关14、a面双轴气缸顶部磁性限位开关15、b面双轴气缸底部磁性限位开关17和b面双轴气缸顶部磁性限位开关18的接线都连接到控制箱19内,并与控制箱19相应的控制单元相连接。
6.所述伺服电机3由伺服电机驱动器(hbs86h)控制,伺服电机驱动器(hbs86h)由控制箱19上的伺服电机控制器(dkc-y110)控制,伺服电机控制器(dkc-y110)由plc控制器(st20)控制。
7.所述转台6由垂直于工作台2长边的直径将其分为a面(右半面)和b面(左半面),a面、b面围绕三爪自定心卡盘7各有四个螺纹孔,用来安装四个a面平板支撑柱9和四个b面平板支撑柱10。
8.所述控制箱19包括:a面焊接指示灯19.1、b面焊接指示灯19.2、焊接完成指示灯19.3、伺服电机控制器面板19.4、选择开关19.5、急停按钮19.6、启动按钮19.7、停止按钮19.8;a面焊接指示灯19.1、b面焊接指示灯19.2和焊接完成指示灯19.3安装在控制箱19的上方,伺服电机控制器面板19.4安装在控制箱19的中间,选择开关19.5、急停按钮19.6、启动按钮19.7和停止按钮19.8安装在控制箱19的下方。
9.本发明一种用于轴类两面圆形焊缝自动焊接装置的操作方法如下:【1】将控制箱19上的选择开关19.5旋转至左侧,a面焊接指示灯19.1点亮,b面焊接指示灯19.2熄灭,此时将a 面焊接信号传送给plc控制器;【2】将过渡轴c放在三爪自定心卡盘7的中央并夹紧,首先将平板支撑筒8套在过渡轴c上,其次将平板上的圆孔穿过过渡轴c,放置在四个a面平板支撑柱9上,最后将轴套套在过渡轴c上。
10.【3】按下控制箱19上的启动按钮19.7,plc控制器(st20)由检测到的a 面焊接信号控制a面双轴气缸13伸出,a面双轴气缸13活塞杆伸出到位后,a面双轴气缸顶部磁性限位开关15检测到活塞杆位置信号后并反馈给plc控制器(st20),之后plc控制器(st20)控制a面焊枪11得电开始焊接;a面焊枪11焊接0.5秒后,转台6开始以设定好的方向和速度匀速旋转;【4】转台6精准的旋转一周后停止,此时伺服电机控制器(dkc-y110)反馈给plc控制器(st20)焊接完成信号,plc控制器(st20)控制a面焊枪11失电结束焊接,延时0.5秒后plc控制器(st20)控制a面双轴气缸13活塞杆缩回到位,a面双轴气缸底部磁性限位开关14检测到位置信号后反馈给plc控制器(st20)复位a面双轴气缸缩回指令,与此同时控制箱19上的焊接完成指示灯19.3点亮,表示焊接完成;【5】将控制箱19上的选择开关19.5旋转至右侧,b面焊接指示灯19.2点亮,a面焊接指示灯19.1熄灭,此时将b 面焊接信号传送给plc控制器(st20);
【6】a面焊接完成后,此时轴套d和过渡板e已经焊接在一起,整体垂直向上将其取出,翻转到另一面,即b面,将其套装在过渡轴c上,放置在四个b面平板支撑柱10上;【7】按下控制箱19上的启动按钮19.7,plc控制器(st20)由检测到的b 面焊接信号控制b面双轴气缸16伸出,b面双轴气缸16活塞杆伸出到位后,b面双轴气缸16顶部磁性限位开关18检测到活塞杆位置信号后,并反馈给plc控制器(st20),之后plc控制器(st20)控制b面焊枪12得电开始焊接;b面焊枪12焊接0.5秒后,转台6开始以设定好的方向和速度匀速旋转,此时控制箱19上的焊接完成指示灯19.3由点亮状态变为熄灭状态;【8】转台6精准的旋转一周后停止,此时伺服电机控制器(dkc-y110)反馈给plc控制器(st20)焊接完成信号,plc控制器(st20)控制b面焊枪12失电结束焊接,延时0.5秒后plc控制器(st20)控制b面双轴气缸16活塞杆缩回到位,b面双轴气缸底部磁性限位开关17检测到位置信号后反馈给plc控制器(st20)复位b面双轴气缸缩回指令,与此同时控制箱19上的焊接完成指示灯19.3由熄灭状态变为点亮状态,表示焊接完成。
11.本发明采用上述技术方案可达到如下有益效果:采用本装置后可实现过渡轴与平板、轴套与平板的两面圆形焊缝自动焊接功能。通过伺服电机控制器脉冲控制方式,可实现转台速度与位置的精确控制,由plc控制器检测外部选择按钮的位置,可控制不同的三位五通气动电磁阀将不同的双轴气缸上安装的焊枪准确的送至相应的焊接部位,从而提高产品焊缝外观质量和焊接效率,实现过渡轴与平板、轴套与平板的两面圆形焊缝自动焊接功能。此外本装置还有急停功能,一旦出现紧急情况,按下急停按钮,此时转台停止、焊枪失电停止焊接、双轴气缸保持原来状态,必须按下伺服电机控制器面板复位键后才能重新启动焊接。在确保安全的前提下,降低了使用安全风险,其操作方法先进,容易操作,达到理想的技术效果。
附图说明
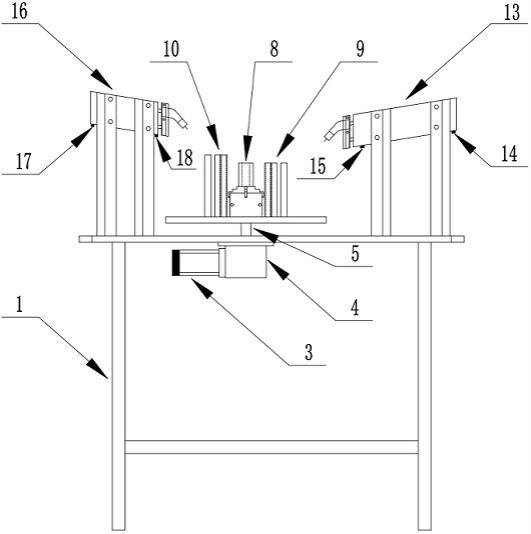
12.图1为本发明一种用于轴类两面圆形焊缝自动焊接装置的主视结构示意图;图2为本发明一种用于轴类两面圆形焊缝自动焊接装置的俯视结构示意图。
13.图3为本发明一种用于轴类两面圆形焊缝自动焊接装置的控制箱平面示意图;图4为本发明一种用于轴类两面圆形焊缝自动焊接装置的伺服控制原理示意图;图5为本发明一种用于轴类两面圆形焊缝自动焊接装置的plc控制原理示意图;图6为本发明一种用于轴类两面圆形焊缝自动焊接装置a面焊接主视结构示意图;图7为本发明一种用于轴类两面圆形焊缝自动焊接装置a面焊接俯视结构示意图;图8为本发明一种用于轴类两面圆形焊缝自动焊接装置b面焊接主视结构示意图;图9为本发明一种用于轴类两面圆形焊缝自动焊接装置b面焊接俯视结构示意图。
14.图中:1、工作台支架,2、工作台,3、伺服电机、4、减速机,5、输出轴轴套,6、转台,7、三爪自定心卡盘,8、平板支撑筒,9、a面平板支撑柱,10、b面平板支撑柱,11、a面焊枪,12、b面焊枪,13、a面双轴气缸,14、a面双轴气缸底部磁性限位开关,15、a面双轴气缸顶部磁性限位开关,16、b面双轴气缸,17、b面双轴气缸底部磁性限位开关,18、b面双轴气缸顶部磁性限位开关,19、控制箱,19.1、a面焊接指示灯,19.2、b面焊接指示灯,19.3、焊接完成指示灯,19.4、伺服电机控制器面板,19.5、选择开关,19.6、急停按钮,19.7、启动按钮,19.8、停止按钮。
具体实施方式
15.下面通过附图及实施例对本发明作进一步的说明。如图1~9所示,一种用于轴类两面圆形焊缝自动焊接装置,包括:工作台支架1、工作台2、伺服电机3、减速机4、输出轴轴套5、转台6、三爪自定心卡盘7、平板支撑筒8、a面平板支撑柱9、b面平板支撑柱10、a面焊枪11、b面焊枪12、a面双轴气缸13、a面双轴气缸底部磁性限位开关14、a面双轴气缸顶部磁性限位开关15、b面双轴气缸16、b面双轴气缸底部磁性限位开关17、b面双轴气缸顶部磁性限位开关18、控制箱19。如图1~9所示,在本实施例中,工作台2通过焊接的方式固定在工作台支架1上,伺服电机3与减速机4用螺钉组装固定在一起,通过螺钉将减速机4外壳上自带的法兰固定安装在工作台上,减速机4输出轴通过工作台2预留的圆孔向上伸出一定高度,通过输出轴上配置的平键与输出轴轴套5紧密配合连接,输出轴轴套5的圆心与转台6的圆心对齐重合后并焊接在一起,三爪自定心卡盘7圆心与转台6圆心对齐重合后并用螺钉固定在转台6上,转台6右半面(a面)安装四个a面平板支撑柱9,转台6左半面(b面)安装四个b面平板支撑柱10,平板支撑筒8居中落在三爪自定心卡盘7上。a面双轴气缸13通过螺钉固定安装在两根角钢上,并将角钢焊接在工作台2右上角的合适位置,b面双轴气缸16通过螺钉固定安装在两根角钢上,并将角钢焊接在工作台2左上角的合适位置。同时a面焊枪11、b面焊枪12分别通过压板安装在a面双轴气缸13和b面双轴气缸16活塞杆的顶部。a面双轴气缸底部磁性限位开关14、a面双轴气缸顶部磁性限位开关15分别安装在a面双轴气缸13缸体的底部和顶部,b面双轴气缸底部磁性限位开关17、b面双轴气缸顶部磁性限位开关18分别安装在b面双轴气缸16的底部和顶部。伺服电机3、a面双轴气缸底部磁性限位开关14、a面双轴气缸顶部磁性限位开关15、b面双轴气缸底部磁性限位开关17和b面双轴气缸顶部磁性限位开关18的接线都进入控制箱19内,并与控制箱19内相应的控制单元相连接。
16.所述伺服电机3由伺服电机驱动器(hbs86h)控制,伺服电机驱动器(hbs86h)由控制箱19的伺服电机控制器(dkc-y110)控制,伺服电机控制器(dkc-y110)由plc控制器(st20)控制,伺服电机速度和位置参数可在伺服电机控制器面板19.4设定,从而实现转台6精准的速度和位置控制。
17.所述转台6由垂直于工作台2长边的直径将其分为a面(右半面)和b面(左半面),每个面围绕三爪自定心卡盘7各有距离合适的四个螺纹孔,用来安装四个a面平板支撑柱9和四个b面平板支撑柱10,保证过渡轴与平板、轴套与平板的焊接部位呈水平状态。
18.所述控制箱19包括:a面焊接指示灯19.1、b面焊接指示灯19.2、焊接完成指示灯19.3、伺服电机控制器面板19.4、选择开关19.5、急停按钮19.6、启动按钮19.7、停止按钮19.8;a面焊接指示灯19.1、b面焊接指示灯19.2和焊接完成指示灯19.3安装在控制箱19的上方,伺服电机控制器面板19.4安装在控制箱19的中间,选择开关19.5、急停按钮19.6、启动按钮19.7和停止按钮19.8安装在控制箱19的下方。
19.所述a面双轴气缸底部磁性限位开关14、a面双轴气缸顶部磁性限位开关15、b面双轴气缸底部磁性限位开关17和b面双轴气缸顶部磁性限位开关18安装在a面双轴气缸13和b面双轴气缸16的底部和顶部,用来检测双轴气缸活塞杆上的磁环位置,从而确定安装在不同双轴气缸上焊枪的位置。
20.为了保证安全,伺服电机控制器(dkc-y110)、plc控制器(st20)、输入信号数字量
采集(sf1、sf3、sf4、bg1、bg2、bg3、bg4、kf9和sf2数字量信号)、中间继电器(kf1、kf2、kf3、kf4、kf5、kf6、kf7、kf8和kf9)均使用低于人体安全电压的直流(dc)24v电压供电。sf1、sf3、sf4、bg1、bg2、bg3、bg4、kf9和sf2数字量信号分别代表选择开关19.5位置信号、启动按钮19.7信号、停止按钮19.8信号、a面双轴气缸底部磁性限位开关14检测信号、a面双轴气缸顶部磁性限位开关15检测信号、b面双轴气缸底部磁性限位开关17检测信号、b面双轴气缸顶部磁性限位开关18检测信号、伺服电机3旋转完成信号、急停按钮19.6信号。中间继电器kf1、kf2、kf3、kf4、kf5、kf6、kf7、kf8和kf9分别控制伺服电机3启动、伺服电机3停止、a面双轴气缸13伸出、a面双轴气缸13缩回、a面焊枪11得电,b面双轴气缸16伸出、a面双轴气缸16缩回、b面焊枪12得电,焊接完成指示。经试验实现了过渡轴与平板、轴套与平板的两面圆形焊缝自动焊接功能,提高产品焊缝外观质量和焊接效率,降低了使用安全风险,达到理想的技术效果。
21.本发明一种用于轴类两面圆形焊缝自动焊接装置的控制方法如下:【1】将控制箱19上的选择开关19.5旋转至左侧,a面焊接指示灯19.1点亮,b面焊接指示灯19.2熄灭,此时将a 面焊接信号传送给plc控制器(st20);【2】将过渡轴c放在三爪自定心卡盘7的中央并夹紧,首先将平板支撑筒8套在过渡轴c上,其次将平板上的圆孔穿过过渡轴c,放置在四个a面平板支撑柱9上,最后将轴套套在过渡轴c上。
22.【3】按下控制箱19上的启动按钮19.7,plc控制器(st20)由检测到的a 面焊接信号控制a面双轴气缸13伸出,a面双轴气缸13活塞杆伸出到位后,a面双轴气缸顶部磁性限位开关15检测到活塞杆位置信号后并反馈给plc控制器(st20),之后plc控制器(st20)控制a面焊枪11得电开始焊接;a面焊枪11焊接0.5秒后,plc控制器(st20)向伺服电机控制器(dkc-y110)发送启动信号,伺服电机控制器(dkc-y110)接收到启动信号后向伺服电机驱动器(hbs86h)发送方向和脉冲信号,伺服电机驱动器(hbs86h)将接收到的方向和脉冲信号用来控制伺服电机3的方向和位置,伺服电机3驱动转台6以伺服电机控制器面板19.4设定好的方向和速度匀速旋转;【4】转台6精准的旋转一周后停止,此时伺服电机控制器(dkc-y110)反馈给plc控制器(st20)焊接完成信号,plc控制器(st20)控制a面焊枪11失电结束焊接,延时0.5秒后plc控制器(st20)控制a面双轴气缸13活塞杆缩回到位,a面双轴气缸底部磁性限位开关14检测到位置信号后反馈给plc控制器(st20)复位a面双轴气缸缩回指令,与此同时控制箱19上的焊接完成指示灯19.3点亮,表示焊接完成;【5】将控制箱19上的选择开关19.5旋转至右侧,b面焊接指示灯19.2点亮,a面焊接指示灯19.1熄灭,此时将b 面焊接信号传送给plc控制器(st20);【6】a面焊接完成后,此时轴套d和过渡板e已经焊接在一起,整体垂直向上将其取出,翻转到另一面(b面)将其套装在过渡轴c上,放置在四个b面平板支撑柱10上;【7】按下控制箱19上的启动按钮19.7,plc控制器(st20)由检测到的b 面焊接信号控制b面双轴气缸16伸出,b面双轴气缸16活塞杆伸出到位后,b面双轴气缸16顶部磁性限位开关18检测到活塞杆位置信号后并反馈给plc控制器(st20),之后plc控制器(st20)控制b面焊枪12得电开始焊接;b面焊枪12焊接0.5秒后,plc控制器(st20)向伺服电机控制器(dkc-y110)发送启动信号,伺服电机控制器(dkc-y110)接收到启动信号后向伺服电机驱动
器(hbs86h)发送方向和脉冲信号,伺服电机驱动器(hbs86h)将接收到的方向和脉冲信号用来控制伺服电机3的方向和速度,伺服电机3驱动转台6以伺服电机控制器面板19.4设定好的方向和速度匀速旋转,此时控制箱19上的焊接完成指示灯19.3由点亮状态变为熄灭状态;【8】转台6精准的旋转一周后停止,此时伺服电机控制器(dkc-y110)反馈给plc控制器(st20)焊接完成信号,plc控制器(st20)控制b面焊枪12失电结束焊接,延时0.5秒后plc控制器(st20)控制b面双轴气缸16活塞杆缩回到位,b面双轴气缸底部磁性限位开关17检测到位置信号后反馈给plc控制器(st20)复位b面双轴气缸缩回指令,与此同时控制箱19上的焊接完成指示灯19.3由熄灭状态变为点亮状态,表示焊接完成。
23.本发明一种用于轴类两面圆形焊缝自动焊接装置及操作方法,具有控制先进、结构紧凑、使用可靠、安全性高、焊接效率和精度高等特点,可用于过渡轴与平板、轴套与平板两面圆形焊缝自动焊接与控制。该装置通过伺服电机控制器脉冲控制方式,可实现转台速度与位置的精确控制,由plc控制器检测外部选择按钮的位置,可控制不同的三位五通气动电磁阀将不同的双轴气缸上安装的焊枪准确的送至相应的焊接部位,从而提高产品焊缝外观质量和焊接效率,实现过渡轴与平板、轴套与平板的两面圆形焊缝自动焊接功能。此外该装置还有急停功能,一旦出现紧急情况,按下急停按钮,此时转台停止、焊枪失电停止焊接、双轴气缸保持原来状态,必须按下伺服电机控制器面板复位键后才能重新启动焊接。在确保安全的前提下,降低了使用安全风险,其控制方法先进,容易操作,达到理想的技术效果。
24.最后应当说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明的全部内容,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述实施例所记载的技术方案进行形式上的修改,或者对其中部分技术特征进行等同替换。凡在本发明的思路启示之内所作出的形式修改、等同替换等,均应包含在本发明的权利保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1