一种自动定位上料系统及产品定位方法与流程
1.本发明涉及产品加工相关技术领域,特别涉及一种产品自动定位上料系统及自动定位上料方法。
背景技术:
2.在传统的产品整形加工工艺中通常需要人工为加工模具上料及定位,这不但加工效率极低,而且人工上料时极不安全。为了保证工人的安全以及提高上料效率,人们发明了机械臂上料装置,通过机械臂夹持料框中的产品然后送到加工模具中,但传统的机械臂的控制方式单一,只能根据设定好的程序按固定路径移动,为了保证产品能够准确放置到加工模具中,产品需要工人放置到指定的位置。这相当于把工人与加工模具进行了分离,在一定程度上提高了工人的安全性,但还是需要人工上料以及定位,这种加工方式自动化程度与加工效率低,产品通过人工方式定位也容易产生偏差。
技术实现要素:
3.针对上述技术问题,本发明提出一种自动定位上料系统,包括活动臂、毛坯框、中转平台以及整形模,所述活动臂的活动范围覆盖所述毛坯框、中转平台以及整形模,所述毛坯框用于放置待加工的产品,所述中转平台上设置有定位装置,所述整形模上设置有模腔;还包括控制器以及设置于所述活动臂自由端的夹具与视觉识别装置,所述控制器能够接收所述视觉识别装置的信号从而得知所述产品的测定位置;在上料过程中,所述控制器能够依照所述产品的测定位置通过控制所述活动臂与夹具把所述毛坯框中的产品夹至所述中转平台上,所述定位装置能够把所述产品调整到产品设定位置,所述控制器还能够控制所述活动臂与夹具移动到设定的夹持位置,然后依照预先设定的程序把产品准确夹至所述整形模的模腔中。
4.其中,所述活动臂,是在所述控制器的控制下活动的臂状构件,所述活动臂的结构是多样的,可以是多个臂体通过活动关节连接组合在一起的结构,也可以是独臂配合滑动座的结构,所述活动臂活动方式包括转动、滑动、伸缩或者多种运动的结合,所述活动臂的活动范围是指所述活动臂自由端所能到达的空间范围,为了能夹持与移动产品,所述活动臂自由端能够到达所述毛坯框、中转平台、整形模以及下面提及的成品框。
5.其中,所述活动臂自由端,是指位于所述活动臂末端能够活动的臂体或构件,其至少包括以下两种情况,第一种,所述活动臂是多臂组合的结构,所述活动臂自由端是指所述活动臂末端能够活动的臂体;第二种,所述活动臂是独臂结构,臂体上设置有滑轨,在滑轨上设置有能够来回滑动的滑动座,所述滑动座为所述活动臂的自由端。所述活动臂自由端也是所述夹具与视觉识别装置的安装位置,这让所述夹具在尽可能大的范围内夹持与移动产品。其中,所述夹具,是用于夹持产品的构件,包括夹爪以及夹爪驱动气缸,所述控制器能够控制所述夹爪驱动气缸伸缩从而让所述夹爪打开或抓合。
6.其中,所述视觉识别装置,是一种能够对产品进行拍照,然后通过对照片中产品的
特征信息进行提取并转化成电信号然后发送给所述控制器的装置,所述控制器在接收到所述视觉识别装置发出的信号后能够通过计算得出产品的测定位置。所述视觉识别装置所拍摄的照片精度并不高,加上产品自身的变形与毛刺的影响,这样所述控制器所得到的产品测定位置与产品的实际位置会产生一定偏差,这意味着所述控制器按照产品测定位置控制所述夹具虽然能够夹持到产品上,但夹持的位置并不精准。
7.其中,所述产品设定位置,是所述产品在所述中转平台上一个指定的放置位置,也是所述自动定位上料系统在设计时预先设定的程序中定义的一个产品放置位置,这个位置是固定的,不会因为产品的实际位置而变化。
8.其中,所述定位装置,是设置于所述中转平台上用于为产品提供定位以及调整产品位置的装置,能够把所述产品调整到产品设定位置从而为所述活动臂与夹具的后续上料动作提供精准的定位。在其中一种实施方式中,所述定位装置包括导向块与定位柱,所述产品上设置有导向孔与定位孔,所述导向块高于所述定位柱,导向块与定位柱的上端部设置有倒角,在所述产品放置到所述中转平台时,所述导向块首先插入所述导向孔中并引导产品向下滑动,所述导向块能够调整所述产品的位置从而让所述定位柱插入所述定位孔中。
9.根据上述技术方案,与现有技术相比,本发明的有益技术效果在于:第一,通过设置所述定位装置,能够为放置于所述中转平台的产品提供定位,还能调整产品的位置从而让产品移动到产品设定位置,再配合所述活动臂与夹具按照预先设定的路径移动就能精准地把产品放置到所述整形模的模腔中,这大大提高了所述夹具夹持产品以及放置到模腔的准确性,不但有利于提高产品的整形效果,还有效减少人工操作提高自动化程度以及提高生产效率;第二,通过设置所述视觉识别装置,能够让所述控制器识别产品的实测位置,所述活动臂与夹具能够依照产品的实测位置进行夹取,放置到所述毛坯框中的产品无需进行精准定位摆放,大大提高了夹取动作的灵活性以及上料效率;第三,所述控制器能够控制所述活动臂与夹具在不同的上料阶段依照所述产品的测定位置动作或者依照预先设定的程序动作,所述中转平台的定位装置通过调整产品位置很好地让两种上料动作实现衔接,大大提高了所述自动定位上料系统的自动化效率以及上料精度。
10.进一步的技术方案还可以是,还包括侧定位块,所述侧定位块的高度不小于所述导向块,所述侧定位块沿所述产品的边缘间隔布置,所述侧定位块的上端部设置有倒角。
11.进一步的技术方案还可以是,所述整形模的模腔边缘设置有间隔布置模具限位块,所述限位块的上端部设置有倒角。
12.进一步的技术方案还可以是,还包括成品框,所述整形模整型完成后,所述控制器依照预先设定的程序控制所述活动臂与夹具把所述整形模中的产品夹至所述成品框中。
13.进一步的技术方案还可以是,在所述毛坯框、中转平台、整形模以及成品框上还分别设置有信号连接所述控制器的传感器,通过所述传感器能够感应所述产品并能够把所感应到的信号发送到所述控制器。
14.一种自动定位上料方法,包括所述自动定位上料系统,步骤如下:s01,所述控制器控制所述活动臂自由端移动到所述毛坯框上方,通过所述视觉识别装置识别产品的位置信息,然后控制所述夹具依照产品的测定位置夹持定位到产品上;s02,在s01的基础上,所述控制器控制所述活动臂与夹具把所述毛坯框中的产品夹至所述中转平台上,并把产品放置到所述定位装置上;
s03,在s02的基础上,所述定位装置把所述产品调整到产品设定位置;s04,在s03的基础上,所述控制器还能够控制所述活动臂与夹具移动到设定的夹持位置,然后依照预先设定的程序把产品准确夹至所述整形模的模腔中。
15.进一步的技术方案还可以是,在s01的基础上,所述控制器能够控制所述夹具转动一定角度从而让所述产品能够对齐所述中转平台的定位装置。
16.进一步的技术方案还可以是,在s04的基础上,还包括成品框,所述整形模完成整型后,所述控制器依照预先设定的程序控制所述活动臂与夹具把所述整形模中的产品夹至所述成品框中。
17.由于本发明具有上述特点和优点,为此可以应用到自动定位上料系统以及自动定位上料方法中。
附图说明
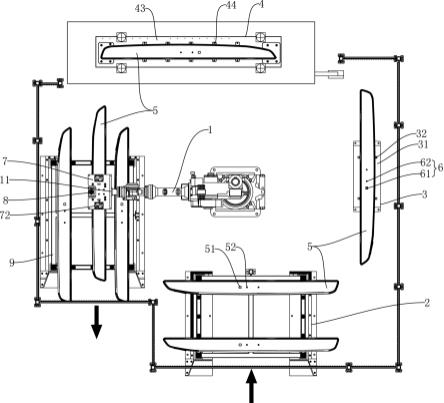
18.图1是所述的自动定位上料系统俯视结构示意图;图2是所述中转平台的俯视方向结构示意图;图3是图2中a-a方向剖面结构示意图;图4是所述整形模的爆炸结构示意图;图5是自动定位上料方法流程图。
具体实施方式
19.下面结合附图对应用本发明技术方案的自动定位上料系统的结构作进一步的说明。除了明确说明属于等同或可选择的实施方案外,下面披露的各种实施细节方案即使在功能方面没有直接关联或协同关系的情况下,既可以选择性应用,也可以合并应用在一个实施例中。
20.如图1~图4所示,所述自动定位上料系统包括活动臂1、毛坯框2、中转平台3以及整形模4,所述活动臂1的活动范围覆盖所述毛坯框2、中转平台3以及整形模4,所述毛坯框2用于放置待加工的产品5,所述中转平台3上设置有定位装置6,所述整形模4上设置有模腔41;还包括控制器(图中未示出)以及设置于所述活动臂自由端11的夹具7与视觉识别装置8,所述控制器能够接收所述视觉识别装置8的信号从而得知所述产品5的测定位置;在上料过程中,所述控制器能够依照所述产品5的测定位置通过控制所述活动臂1与夹具7把所述毛坯框2中的产品5夹至所述中转平台3上,所述定位装置6能够把所述产品5调整到产品设定位置,所述控制器还能够控制所述活动臂1与夹具7移动到设定的夹持位置,然后依照预先设定的程序把产品5准确夹至所述整形模4的模腔41中。
21.在本实施例中,所述活动臂1是由多个臂体组成的机械臂组件,多个臂体由活动关节活动连接在一起,活动关节能够转动或摆动,这样所述活动臂1就能实现三维方向的活动。多个臂体中一个的臂体连接在基座上,这里把该臂体定为所述活动臂1的连接端;相对的,位于自由活动一端的臂体就是所述活动臂自由端11。所述活动臂1的活动范围是指所述活动臂自由端11所能到达的空间范围,所述夹具7与视觉识别装置8设置于所述活动臂自由端11,这样,在所述活动臂1的活动范围也就是所述夹具7能够夹持移动产品的范围。当然,所述活动臂1的结构与活动方式是多样的,在另一种实施例中,所述活动臂1由单个活动臂
体组成,臂体一端活动连接于基座上,臂体上设置有滑轨,在滑轨上设置有能够在所述滑轨上来回滑动的滑动座,所述夹具7与视觉识别装置8安装在所述滑动座上,这里所述滑动座作为所述活动臂1的活动臂自由端11。
22.进一步的,所述夹具7作为用于夹持产品5的构件,包括夹爪(图中未示出)以及夹爪驱动气缸72,所述控制器能够控制所述夹爪驱动气缸72的轴伸缩从而控制所述夹爪打开或抓合。为了增加所述夹具7的夹持灵活性,所述夹具7还可以转动设置于所述活动臂体的自由端11,这使所述夹具7在夹持产品前能够自行调节所述夹爪的方向以适应产品的摆放方向,在夹持产品后又能通过转动所述夹爪让产品适应下一工位摆放位置。而所述视觉识别装置8,是一种能够对产品5进行拍照然后通过对照片中产品5的特征信息进行提取并转化成电信号发送给所述控制器的装置,所述控制器在接收到所述视觉识别装置8发出的信号后能够通过计算得出产品5的测定位置。需要说明的是,所述视觉识别装置8所拍摄的照片精度并不高,加上产品自身的变形与毛刺的影响,这样所述控制器所得到的产品测定位置与产品5的实际位置会产生一定偏差,偏差范围可在0.5mm~5mm之间;如果此时把产品5直接移动到整形模4上,所述产品5无法准确放入模腔41中,这可能导致产品5无法整形或达不到理想的整形效果。但本发明通过所述视觉识别装置8的信号让所述控制器识别产品5的大致实测位置,是为了让所述活动臂1与夹具7能够依照产品5的实测位置进行夹取并放置到所述中转平台3上,这样的好处是放置到所述毛坯框2中的产品5无需进行精准定位摆放,产品5放到所述中转平台3也不需要十分精准,这大大提高了夹取动作的灵活性与上料效率。
23.如图2与图3所示,所述中转平台3包括底部的基板31以及设置于所述基板31上的定位装置6。所述定位装置6是设置于所述中转平台3上用于为产品5提供定位以及调整产品5位置的装置,能够把所述产品5调整到产品设定位置从而为所述活动臂1与夹具7的后续上料动作提供精准的定位。在本实施例中,所述定位装置6包括导向块61与定位柱62,所述产品5上设置有导向孔51与定位孔52。其中,所述导向块61高于所述定位柱62,所述导向块61与定位柱62的上端部设置有倒角;而所述定位柱62设置有两根,相应的所述定位孔52设置有两个。在所述产品5放置到所述中转平台3时,所述导向块61首先插入所述导向孔51中并引导产品5向下滑动,所述产品5在下滑过程中,所述导向块61能够调整所述产品5的位置并让所述定位柱62插入所述定位孔52中,通过两根所述定位柱62把所述产品5精准定位到所述中转平台3的产品设定位置。所述产品设定位置是所述自动定位上料系统在设计时预先设定的程序中定义的一个产品放置位置,这个位置是固定的,不会因为产品5的实际位置而变化。。设置所述定位装置6的好处是,能够为粗略放置于所述中转平台3的产品5提供定位以及调整产品5到精准的产品设定位置,再配合所述活动臂1与夹具7对产品5进行定点夹持,然后按照预先设定的路径就能精准地把产品5放置到所述整形模4的模腔41中,这大大提高了所述夹具7夹持产品5以及放置到模腔41的准确性,不但有利于提高产品5的整形效果,还有效减少人工操作从而提高系统的自动化程度以及生产效率;为了保证产品5能够更好地放置到所述中转平台3上,所述中转平台3还包括侧定位块32,所述侧定位块32的高度不小于所述导向块61,所述侧定位块32沿所述产品5的边缘间隔布置,所述侧定位块32的上端部设置有倒角。
24.如图4所示,所述整形模4包括上模42以及下模43,所述下模43上设置有用于放置所述产品5的模腔41,所述上模42连接在油压机上且朝向产品的一侧设置有若干压块。为了
保证产品5能够更好地放置到所述整形模4上,所述整形模4的模腔41边缘设置有间隔布置模具限位块44,所述限位块44的上端部朝向所述模腔41的一侧设置有倒角。待所述夹具61把产品5精准放入到所述模腔41后,所述上模42在油压机的带动下压紧到所述产品5上从而实现对产品5整形。
25.如图1所示,进一步的,还包括成品框9,所述整形模4对产品5完成整型后,所述控制器依照预先设定的程序控制所述活动臂1与夹具7把所述整形模4中的产品5夹至所述成品框9中。
26.进一步的,在所述毛坯框2、中转平台3、整形模4以及成品框9上还分别设置有信号连接所述控制器的传感器(图中未示出),通过所述传感器能够感应所述产品5并能够把所感应到的信号发送到所述控制器。在所述毛坯框2、中转平台3、整形模4以及成品框9的周边还设置有电子围栏,在产品5搬运或加工过程中,当有人员或装置越过电子围栏划定产品加工区域,控制器能够控制所述活动臂1停止搬运以及让所述整型模4停止加工从而减少人员伤害或机械碰撞。
27.一种自动定位上料方法,包括所述自动定位上料系统,步骤如下:s01,所述控制器控制所述活动臂自由端11移动到所述毛坯框2上方,通过所述视觉识别装置8识别产品5的位置信息,然后控制所述夹具7依照产品5的测定位置夹持定位到产品5上;s02,在s01的基础上,所述控制器控制所述活动臂1与夹具7把所述毛坯框2中的产品5夹持到所述中转平台3上方,并把产品5放置到所述定位装置6上;s03,在s02的基础上,所述定位装置6把所述产品5调整到产品设定位置;s04,在s03的基础上,所述控制器还能够控制所述活动臂1与夹具7移动到设定的夹持位置,然后依照预先设定的程序把产品5准确夹至所述整形模4的模腔41中。
28.进一步的,在s01的基础上,所述控制器能够控制所述夹具7转动一定角度从而让所述产品5能够对齐所述中转平台3的定位装置6。
29.进一步的,在s04的基础上,还包括成品框9,所述整形模4完成整型后,所述控制器依照预先设定的程序控制所述活动臂1与夹具7把所述整形模4中的产品5夹至所述成品框9中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1