一种纵扭超声振动自动钻铆末端执行装置
1.本发明涉及航空航天装配设备技术领域,尤其涉及一种纵扭超声振动自动钻铆末端执行装置。
背景技术:
2.导弹、火箭、飞机等装备的装配过程中,铆接作业在总装配工作量中占比较大,传统人工铆接因存在铆接质量不够理想、一致性难以保证等问题。在引进自动钻铆装备后,传统人工铆接存在的问题才得到一些缓解,自动钻铆装备不仅能够减少人工参与比例、提高产品质量,同时对于推动航空航天领域数字化装配装备发展具有重大意义。
3.但是,现有技术中的自动钻铆装备仍存在铆钉干涉不均匀、铆接后钉孔中钉杆呈喇叭状的问题。
4.为此,针对上述的技术问题还需进一步解决。
技术实现要素:
5.本发明实施例的目的是提供一种纵扭超声振动自动钻铆末端执行装置,以实现铆钉干涉均匀并且铆接后钉孔中钉杆呈筒状。
6.为解决上述技术问题,本发明实施例提供如下技术方案:本发明第一方面提供一种纵扭超声振动自动钻铆末端执行装置,包括基座单元,所述基座单元的外部同时连接有压紧单元和进给单元以及工位转换单元,所述基座单元的内部设置有转筒,所述转筒内分别安装有纵扭超声铆接单元和制孔单元,所述压紧单元上连接有送钉单元,所述压紧单元和所述进给单元上连接有检测单元;其中,所述工位转换单元上还设置有限位单元;所述基座单元、所述压紧单元、所述进给单元、所述工位转换单元、所述纵扭超声铆接单元、所述制孔单元、所述送钉单元和所述检测单元均被所述控制系统进行操控。
7.进一步地,所述基座单元包括第一基座和设置在所述第一基座的对侧的第二基座,所述第一基座和所述第二基座之间设置有第一固定板,并且所述第一固定板同时与所述第一基座和所述第二基座相连接,所述第一固定板的对侧设置有第二固定板,并且同时与所述第一基座和所述第二基座相连接;所述第一基座、所述第一固定板、所述第二基座和所述第二固定板共同围成用于放置所述转筒的转筒存放空间,所述转筒内分别设置有用于存放所述纵扭超声铆接单元的第一存放空间,以及多个用于存放所述制孔单元的第二存放空间。
8.进一步地,所述压紧单元包括:第一导轨,与所述第一基座相连接,所述第一导轨上滑动连接有第一滑块;第二导轨,与所述第二基座相连接,所述第二导轨上滑动连接有第二滑块;第一压紧连杆,所述第一压紧连杆的一侧端部与所述第一滑块相连接,所述第一压紧连杆的而另一侧端部连接有压板;
第二压紧连杆,所述第二压紧连杆的一侧端部与所述第二滑块相连接,所述第二压紧连杆的而另一侧端部连接至所述压板;第一压紧气缸,所述第一压紧气缸的一侧端部固定在所述第一基座内,所述第一压紧气缸的另一侧端部与所述压板相连接;第二压紧气缸,所述第二压紧气缸的一侧端部固定在所述第二基座内,所述第二压紧气缸的另一侧端部与所述压板相连接;压脚,设置在远离所述第一导轨侧的所述压板上。
9.进一步地,所述进给单元包括:设置在远离所述第一存放空间侧的所述第一固定板的表面的进给伺服电机,以及与所述进给伺服电机相连接并且设置在远离所述第一存放空间侧的所述第一固定板的表面的第一减速器,所述第一减速器相连接有第一同步带轮, 远离所述第一存放空间侧的所述第一固定板的表面还设置有第二同步带轮,所述第二同步带轮的旋转方向与所述第一同步带轮的旋转方向之间为一直线,所述第一同步带轮和所述第二同步带轮上同时连接有第一同步带;所述第二同步带轮上连接有滚珠丝杠并且带动所述滚珠丝杠进行旋转,所述滚珠丝杠上同时连接有位于靠近所述第一存放空间侧的所述第一固定板表面的推杆和推块,所述第一固定板上设置有连通口,所述推杆和所述推块均穿过所述连通口。
10.进一步地,所述工位转换单元包括设置在远离所述第一存放空间侧的所述第二固定板的表面的转位伺服电机,以及与所述转位伺服电机相连接并且设置在远离所述第一存放空间侧的所述第二固定板的表面的第二减速器,所述第二减速器连接有第三同步带轮,靠近所述第三同步带轮侧的所述转筒的侧壁上通过转轴连接有第四同步带轮, 所述第三同步带轮和所述第四同步带轮上同时连接有第二同步带,所述转筒的外部设置有轴承。
11.进一步地,所述纵扭超声铆接单元包括:纵扭超声变幅杆,与铆模相连接;超声换能器,与所述纵扭超声变幅杆相连接; 铆接筒体,设置在所述超声换能器和部分所述纵扭超声变幅杆的外部;第一复位弹簧,设置在所述铆接筒体的外部;第一限位块,分别设置在所述第一复位弹簧的端部并且对所述第一复位弹簧进行限位。
12.进一步地,所述制孔单元包括:刀柄,与刀具相连接;电主轴,与所述刀柄相连接;电主轴夹座,与远离所述刀柄侧的所述电主轴相连接;制孔筒体,设置在所述电主轴夹座的外部并且与所述电主轴夹座相连接;第二复位弹簧,设置在所述制孔筒体的外表面;第二限位块,分别设置在所述第二复位弹簧的端部并且对所述第二复位弹簧进行限位。
13.进一步地,所述送钉单元包括:铆钉限位环,与所述压脚相连接;
送钉气管,设置在所述铆钉限位环和所述压板之间的所述压脚上,并且将铆钉吹送至靠近所述铆钉限位环侧的所述压脚中。
14.进一步地,所述检测单元包括:深度相机,安装在远离所述第一导轨侧的所述压板上;压力传感器,安装在所述推杆与所述推块之间;栅格尺安装座,设置在远离所述第一存放空间侧的所述第一固定板表面的所述推杆上;栅格尺,设置在所述栅格尺安装座上。
15.进一步地,所述限位单元包括:单元限位块,分别设置在靠近所述第四同步带轮侧的所述第一存放空间的边缘与相邻靠近所述第四同步带轮侧的所述第二存放空间的边缘之间、以及靠近所述第四同步带轮侧的相邻所述第二存放空间的边缘之间;靠近所述第四同步带轮侧的所述第一存放空间的边缘处,以及靠近所述第四同步带轮侧的各所述第二存放空间的边缘处分别设置有两组对称分布的导向槽,其中靠近所述第四同步带轮侧的所述第一存放空间的边缘处的一组对称分布的所述导向槽的前端安装有限位块。
16.相较于现有技术,本发明第一方面提供的纵扭超声振动自动钻铆末端执行装置,纵扭超声铆接单元和制孔单元均安装在转筒中,压紧单元在基座单元上进行直线运动,制孔单元在进给单元的驱动下完成制孔,限位单元限制纵扭超声铆接单元周向转动的同时进行轴向导向,工位转换单元将纵扭超声铆接单元转至进给工位,进给单元驱动纵扭超声铆接单元向前进给,纵扭超声铆接单元将送钉单元中铆钉推入铆钉孔并顶紧,对铆钉施加纵扭超声进行铆接后纵扭超声铆接单元复位。检测单元能够采集加工孔位点云数据,确定基准孔位置,并根据采集到的的数据检测算法拟合出加工孔圆心与法向方向,数据反馈修正载体位姿,从而使纵扭超声铆接单元准确到达待加工工位,实现了铆钉干涉均匀并且铆接后钉孔中钉杆呈筒状。
附图说明
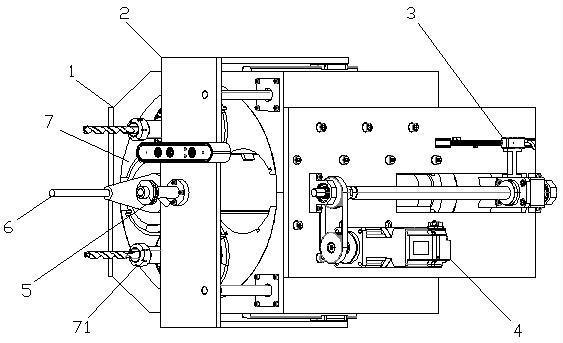
17.通过参考附图阅读下文的详细描述,本发明示例性实施方式的上述以及其他目的、特征和优点将变得易于理解。在附图中,以示例性而非限制性的方式示出了本发明的若干实施方式,相同或对应的标号表示相同或对应的部分,其中:图1示意性地示出了纵扭超声振动自动钻铆末端执行装置的示意图;图2示意性地示出了基座单元的示意图;图3示意性地示出了压紧单元的示意图;图4示意性地示出了进给单元的示意图;图5示意性地示出了推杆的示意图;图6示意性地示出了工位转换单元的示意图;图7示意性地示出了限位单元的示意图;图8示意性地示出了纵扭超声铆接单元的内部示意图;图9示意性地示出了纵扭超声铆接单元的外部示意图;
图10示意性地示出了制孔单元的示意图;图11示意性地示出了送钉单元的示意图;图12示意性地示出了检测单元的示意图;图13示意性地示出了压力传感器的示意图;附图标号说明:1、基座单元;11、第一基座;12、第二基座;13、第一固定板;14、第二固定板;15、第一存放空间;16、第二存放空间;2、压紧单元;21、第一导轨;22、第二导轨;23、第一滑块;24、第二滑块;25、第一压紧连杆;26、第二压紧连杆;27、第一压紧气缸;28、第二压紧气缸;29、压板;291、压脚;3、检测单元;31、栅格尺安装座;32、栅格尺;33、压力传感器;34、深度相机;4、进给单元;41、进给伺服电机;42、第一减速器;43、第一同步带轮;44、第一同步带;45、第二同步带轮;46、滚珠丝杠;47、推块;48、滑块;49、推杆;5、送钉单元;51、铆钉限位环;52、送钉气管;6、纵扭超声铆接单元;61、铆模;62、纵扭超声变幅杆;63、超声换能器;64、铆接筒体;65、第一复位弹簧;66、第一限位块;7、转筒;71、制孔单元;711、刀具;712、刀柄;713、电主轴;714、电主轴夹座;715、第二限位块;716、第二复位弹簧;717、制孔筒体;8、工位转换单元;81、转位伺服电机;82、第二减速器;83、第二同步带;84、第三同步带轮;85、第四同步带轮;86、转轴;861、定位销;87、单元限位块;88、轴承;9、限位单元;91、限位块;92、导向槽。
具体实施方式
18.下面将参照附图更详细地描述本公开的示例性实施方式。虽然附图中显示了本公开的示例性实施方式,然而应当理解,可以以各种形式实现本公开而不应被这里阐述的实施方式所限制。相反,提供这些实施方式是为了能够更透彻地理解本公开,并且能够将本公开的范围完整的传达给本领域的技术人员。若未特别指明,实施例中所用的技术手段为本领域技术人员所熟知的常规手段。
19.需要注意的是,除非另有说明,本发明使用的技术术语或者科学术语应当为本发明所属领域技术人员所理解的通常意义。在本文中,诸如“第一”和“第二”等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。术语“连接”、“相连”等术语应作广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接连接,也可以是通过中间媒介间接相连。术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
20.本发明实施例提供了一种纵扭超声振动自动钻铆末端执行装置,结合图1、图6和图7,包括基座单元1,基座单元1的外部同时连接有压紧单元2和进给单元4以及工位转换单
元8,基座单元1的内部设置有转筒7,转筒7内分别安装有纵扭超声铆接单元6和制孔单元71,压紧单元2上连接有送钉单元5,压紧单元2和进给单元4上连接有检测单元3,其中,工位转换单元8上还设置有限位单元9。基座单元1、压紧单元2、进给单元4、工位转换单元8、纵扭超声铆接单元6、制孔单元71、送钉单元5和检测单元3均被控制系统进行操控。
21.具体地,纵扭超声铆接单元6和制孔单元71均安装在转筒7中,压紧单元2在基座单元1上进行直线运动,制孔单元71在进给单元4的驱动下完成制孔,限位单元9限制纵扭超声铆接单元6周向转动的同时进行轴向导向,工位转换单元8将纵扭超声铆接单元6转至进给工位,进给单元4驱动纵扭超声铆接单元6向前进给,纵扭超声铆接单元6将送钉单元5中铆钉推入铆钉孔并顶紧,对铆钉施加纵扭超声进行铆接后纵扭超声铆接单元6复位。检测单元3能够采集加工孔位点云数据,确定基准孔位置,并根据采集到的的数据检测算法拟合出加工孔圆心与法向方向,数据反馈修正载体位姿,使纵扭超声铆接单元6准确到达待加工工位。从而实现了铆钉干涉均匀并且铆接后钉孔中钉杆呈筒状。
22.控制系统对基座单元1、压紧单元2、进给单元4、工位转换单元8、纵扭超声铆接单元6、制孔单元71、送钉单元5和检测单元3进行操控的操控方式和操控过程均为现有技术中的成熟技术内容,并且其不属于本发明的重点,因此不对其进行详细说明。
23.为了实现转筒7的安装以及纵扭超声铆接单元6和制孔单元71的安装和转动,在具体实施例中,如图2所示,基座单元1包括第一基座11和设置在第一基座11的对侧的第二基座12,第一基座11和第二基座12之间设置有第一固定板13,并且第一固定板13同时与第一基座11和第二基座12相连接,第一固定板13的对侧设置有第二固定板14,并且同时与第一基座11和第二基座12相连接。第一基座11、第一固定板13、第二基座12和第二固定板14共同围成用于放置转筒7的转筒存放空间,转筒7内分别设置有用于存放纵扭超声铆接单元6的第一存放空间15,以及多个用于存放制孔单元71的第二存放空间16。
24.在具体实施例中,如图3所示,压紧单元包括第一导轨21、第二导轨22、第一压紧连杆25、第二压紧连杆26、第一压紧气缸27、第二压紧气缸28和压脚291。第一导轨21,与第一基座11相连接,第一导轨21上滑动连接有第一滑块23。第二导轨22,与第二基座12相连接,第二导轨22上滑动连接有第二滑块24。第一压紧连杆25,第一压紧连杆25的一侧端部与第一滑块23相连接,第一压紧连杆25的而另一侧端部连接有压板29。第二压紧连杆26,第二压紧连杆26的一侧端部与第二滑块24相连接,第二压紧连杆26的而另一侧端部连接至压板29。第一压紧气缸27,第一压紧气缸27的一侧端部固定在第一基座11内,第一压紧气缸27的另一侧端部与压板29相连接。第二压紧气缸28,第二压紧气缸28的一侧端部固定在第二基座12内,第二压紧气缸28的另一侧端部与压板29相连接。压脚291,设置在远离第一导轨21侧的压板29上。
25.具体地,压板29在第一压紧连杆25、第二压紧连杆26、第一滑块23、第二滑块24、第一导轨21、第二导轨22共同作用下保证压板29进行直线运动,由第一压紧气缸27和第二压紧气缸28提供压紧力驱动压板29运动,使压板29前端的压脚291与零件表面紧密贴合。
26.在具体实施例中,结合图4和图5,进给单元4包括设置在远离第一存放空间15侧的第一固定板13的表面的进给伺服电机41,以及与进给伺服电机41相连接并且设置在远离第一存放空间15侧的第一固定板13的表面的第一减速器42,第一减速器42相连接有第一同步带轮43, 远离第一存放空间15侧的第一固定板13的表面还设置有第二同步带轮45,第二同
步带轮45的旋转方向与第一同步带43轮的旋转方向之间为一直线,第一同步带轮43和第二同步带轮45上同时连接有第一同步带44。第二同步带轮45上连接有滚珠丝杠46并且带动滚珠丝杠46进行旋转,滚珠丝杠46上同时连接有位于靠近第一存放空间15侧的第一固定板13表面的推杆49和推块47,第一固定板13上设置有连通口,推杆49和推块47均穿过连通口。
27.具体地,由进给伺服电机41、第一减速器42提供驱动力,通过第一同步带44、第一同步带轮43和第二同步带轮45带动滚珠丝杠46转动,从而使滚珠丝杠46带动推杆49和安装于压力传感器33前端的推块47做直线运动,实现对制孔单元71和纵扭超声铆接单元6进给驱动。
28.作为另一种实施方式,滚珠丝杠46上连接有滑块48,滑块48上同时连接有位于靠近第一存放空间15侧的第一固定板13表面的推杆49和推块47。
29.为了实现转筒7的转动,在具体实施例中,如图6所示,工位转换单元8包括设置在远离第一存放空间15侧的第二固定板14的表面的转位伺服电机81,以及与转位伺服电机81相连接并且设置在远离第一存放空间15侧的第二固定板14的表面的第二减速器82,第二减速器82连接有第三同步带轮84,靠近第三同步带轮84侧的转筒7的侧壁上通过转轴86连接有第四同步带轮85, 第三同步带轮84和第四同步带轮85上同时连接有第二同步带83,转筒7的外部设置有轴承88。
30.其中,轴承88为现有技术中的超薄轴承。
31.作为另一种实施方式,靠近第三同步带轮84侧的转筒7的侧壁上设置有定位销861,转筒7与转轴86通过定位销固定861实现同步转动。
32.在具体实施例中,结合图8和图9,纵扭超声铆接单元6包括纵扭超声变幅杆62、超声换能器63、铆接筒体64、第一复位弹簧65和第一限位块66。纵扭超声变幅杆62,与铆模61相连接。超声换能器63,与纵扭超声变幅杆62相连接。铆接筒体64,设置在超声换能器63和部分纵扭超声变幅杆62的外部。第一复位弹簧65,设置在铆接筒体64的外部。第一限位块66,分别设置在第一复位弹簧65的端部并且对第一复位弹簧65进行限位。
33.具体地,纵扭超声变幅杆62、超声换能器63、铆接筒体64、第一复位弹簧65和第一限位块66在进给单元4作用下向前驱动,铆模61将压脚291中铆钉推入钉孔并保持进给实现对铆钉的顶紧,在开始施加压铆力时开启超声换能器63对铆钉施加纵扭超声,铆接完成后卸载压铆力并关闭超声换能器63,同时进给单元4反向运动至初始位置,由栅格尺32的数据控制进给行程,由压力传感器33的数据控制施加压铆力的大小,纵扭超声变幅杆62、超声换能器63、铆接筒体64、第一复位弹簧65和第一限位块66在第一复位弹簧65、限位单元9中的限位块91和单元限位块87共同作用下恢复至初始位置。
34.在具体实施例中,如图10所示,制孔单元71包括刀柄712、电主轴713、电主轴夹座714、制孔筒体717、第二复位弹簧716和第二限位块715。刀柄712,与刀具711相连接。电主轴713,与刀柄712相连接。电主轴夹座714,与远离刀柄712侧的电主轴713相连接。制孔筒体717,设置在电主轴夹座714的外部并且与电主轴夹座714相连接。第二复位弹簧716,设置在制孔筒体717的外表面。第二限位块715,分别设置在第二复位弹簧716的端部并且对第二复位弹簧716进行限位。
35.具体地,开启电主轴713,刀具711、刀柄712、电主轴713、电主轴夹座714、制孔筒体717、第二复位弹簧716和第二限位块715在进给单元4的驱动下向前驱动,制孔时由栅格尺
32的数据控制进给行程,刀具711完成制孔后在进给单元4反向运动使刀具711、刀柄712、电主轴713、电主轴夹座714、制孔筒体717、第二复位弹簧716和第二限位块715至初始位置,刀具711、刀柄712、电主轴713、电主轴夹座714、制孔筒体717、第二复位弹簧716和第二限位块715在第二复位弹簧716、限位单元9中的限位块91和单元限位块87共同作用下恢复至初始位置。
36.在具体实施例中,如图11所示,送钉单元5包括铆钉限位环51和送钉气管52。铆钉限位环51,与压脚291相连接。送钉气管52,设置在铆钉限位环51和压板29之间的压脚291上,并且将铆钉吹送至靠近铆钉限位环51侧的压脚291中。
37.具体地,通过压缩气体将铆钉由送钉气管52吹送至压脚291中,铆钉限位环51防止铆钉脱落及铆钉与零件碰撞。同时重复工位转换单元8的运行过程,使转筒7内的纵扭超声铆接单元6转动至进给工位。
38.在具体实施例中,结合图12和图13,检测单元3包括深度相机34、压力传感器33、栅格尺安装座31和栅格尺32。深度相机34,安装在远离第一导轨21侧的压板29上。压力传感器33,安装在推杆49与推块47之间。栅格尺安装座31,设置在远离第一存放空间15侧的第一固定板13表面的推杆49上。栅格尺32,设置在栅格尺安装座31上。
39.具体地,深度相机34能够采集加工孔位点云数据,确定基准孔位置,并根据采集到的的数据检测算法拟合出加工孔圆心与法向方向,数据反馈修正载体位姿,从而使纵扭超声铆接单元6准确到达待加工工位。在铆接和制孔时依据栅格尺32的数据控制进给行程。
40.在具体实施例中,结合图6和图7,限位单元9包括单元限位块87,单元限位块87分别设置在靠近第四同步带轮85侧的第一存放空间15的边缘与相邻靠近第四同步带轮85侧的第二存放空间16的边缘之间、以及靠近第四同步带轮85侧的相邻第二存放空间16的边缘之间。靠近第四同步带轮84侧的第一存放空间15的边缘处,以及靠近第四同步带轮84侧的各第二存放空间16的边缘处分别设置有两组对称分布的导向槽92,其中靠近第四同步带轮84侧的第一存放空间15的边缘处的一组对称分布的导向槽92的前端安装有限位块91。
41.具体地,第一存放空间15的边缘处以及每个第二存放空间15的边缘处均有四处用于限位和导向作用的导向槽92,两个对称的导向槽92为一组,共两组对称的导向槽92,其中一组对称导向槽92与制孔筒体717上的第二限位块715和铆接筒体717上的第一限位块66匹配安装,另外一组导向槽92前端安装的限位块91对制孔筒体717上的第二复位弹簧716和铆接筒体717上的第一复位弹簧65进行限位。
42.单元限位块87为制孔单元71提供导向与限位。
43.本发明中的纵扭超声振动自动钻铆末端执行装置还能够避免在狭长空间需要人工铆接。
44.一种纵扭超声振动自动钻铆末端执行装置的工作方法,包括以下步骤:s1、检测单元3中深度相机34能够采集加工孔位点云数据,确定基准孔位置,并根据采集到的的数据检测算法拟合出加工孔圆心与法向方向,数据反馈修正载体位姿,从而使纵扭超声铆接单元6准确到达待加工工位,在铆接和制孔时依据栅格尺32的数据控制进给行程;s2、压紧单元2中压板29在第一压紧连杆25、第二压紧连杆26、第一滑块23、第二滑块24、第一导轨21、第二导轨22共同作用下保证压板29进行直线运动,由第一压紧气缸27和
第二压紧气缸28提供压紧力驱动压板29运动,使压板29前端的压脚291与零件表面紧密贴合;s3、工位转换单元8由转位伺服电机81和第二减速器82提供动力,通过第二同步带83、第三同步带轮84和第四同步带轮85带动转轴86转动,转筒7与转轴86实现同步转动,使转筒7内的制孔单元71随转筒7转动至进给工位,轴承88安装于第一基座11和第二基座12与转筒7之间以减小转筒7转动时与第一基座11和第二基座12接触产生的摩擦力;s4、进给单元4由进给伺服电机41和第一减速器42提供驱动力,通过第一同步带44、第一同步带轮43和第二同步带轮45带动滚珠丝杠46转动,从而带动推杆49和安装于压力传感器33前端的进给推块47进行直线运动,实现对制孔单元71进给驱动;s5、开启制孔单元71中的电主轴713,刀具711、刀柄712、电主轴713、电主轴夹座714、制孔筒体717、第二复位弹簧716和第二限位块715在进给单元4的驱动下向前驱动,制孔时由栅格尺32的数据控制进给行程,刀具711完成制孔后在进给单元4反向运动使刀具711、刀柄712、电主轴713、电主轴夹座714、制孔筒体717、第二复位弹簧716和第二限位块715至初始位置,刀具711、刀柄712、电主轴713、电主轴夹座714、制孔筒体717、第二复位弹簧716和第二限位块715在第二复位弹簧716、限位单元9中的限位块91和单元限位块87共同作用下恢复至初始位置;s6、送钉单元5通过压缩气体将铆钉由送钉气管吹送至压脚291中,铆钉限位环51防止铆钉脱落及铆钉与零件碰撞,同时重复工位转换单元8的运行过程,使转筒7内的纵扭超声铆接单元6转动至进给工位;s7、纵扭超声铆接单元6中的纵扭超声变幅杆62、超声换能器63、铆接筒体64、第一复位弹簧65和第一限位块66在进给单元4作用下向前驱动,铆模61将压脚291中铆钉推入钉孔并保持进给实现对铆钉的顶紧,在开始施加压铆力时开启超声换能器63对铆钉施加纵扭超声,铆接完成后卸载压铆力并关闭超声换能器63,同时进给单元4反向运动至初始位置,由栅格尺32的数据控制进给行程,由压力传感器33的数据控制施加压铆力的大小,纵扭超声变幅杆62、超声换能器63、铆接筒体64、第一复位弹簧65和第一限位块66在第一复位弹簧65、限位单元9中的限位块66和单元限位块87共同作用下恢复至初始位置;s8、纵扭超声铆接单元6复位后,压紧单元2中第一压紧气缸27、第二压紧气缸28带动压板29移动至初始位置;s9、纵扭超声振动自动钻铆末端执行装置重复s1的过程以确认下一加工位置,同时由工位转换单元8将制孔单元71转动至进给工位,准备加工下一孔位。
45.以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以所述权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1