一种LED灯珠焊线批量焊接辅助工具的制作方法
一种led灯珠焊线批量焊接辅助工具
技术领域
1.本发明涉及一种led灯珠焊线批量焊接辅助工具,通过进给机构、上料机构和传动机构的配合实现灯条的移动以及灯珠本体的上料,从而实现自动化的进给和上料。
背景技术:
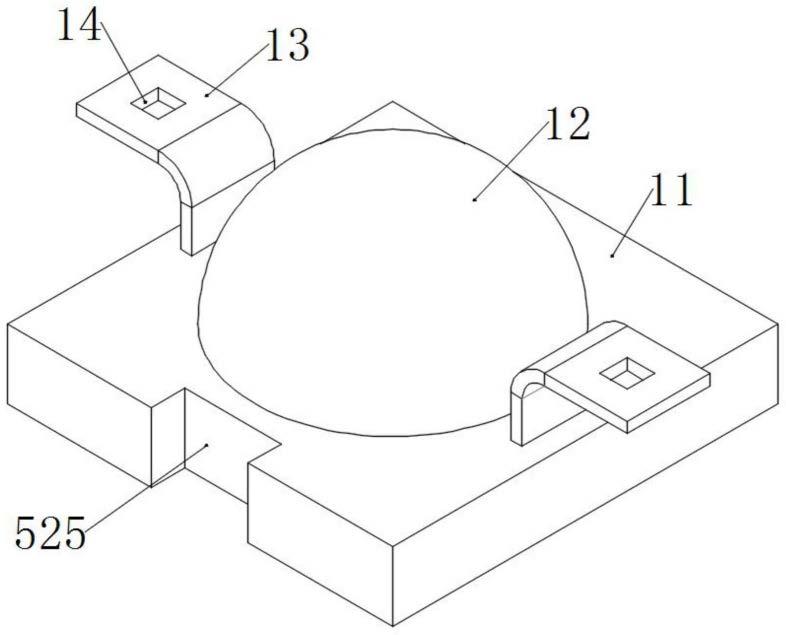
2.如图1所示,led灯珠包含两个金属引脚,led灯珠的焊接即将两个金属引脚与灯条上的接电板通过锡焊的方式焊接在一起,在焊接的时候,需要将led灯珠拾取,再将金属引脚与接电板对准,最终完成锡焊的操作。
3.由于led灯珠本身较小,人工拾取不便,且金属引脚的定位也十分不便,在进行批量焊接的过程中,工人需要频繁的拾取和定位led灯珠,造成工作效率的低下。
技术实现要素:
4.为解决上述问题,本发明提供了一种led灯珠焊线批量焊接辅助工具,本发明是通过以下技术方案来实现的。
5.一种led灯珠焊线批量焊接辅助工具,包括灯珠本体,所述灯珠本体包括灯座以及固接在灯座上的灯罩,所述灯罩内设有led发光管,灯座的前后两侧对称固接有金属引脚,两个金属引脚分别与led发光管的正负极电性连接,还包括:
6.座板,所述座板的上表面间隔固接有两根横向的限位条;
7.灯条,所述灯条滑动连接在限位条之间,所述金属引脚为l形,金属引脚的水平部上开设有插槽,灯条的上表面横向均匀开设有与灯座适配的安装槽,安装槽前后两侧的灯条上开设有与金属引脚适配的凹槽,灯条的前后两侧对应凹槽的位置固接有接电板,所述接电板的右端固接有接电块,接电板对应各凹槽的位置电性连接有金属插块,所述金属插块与插槽适配;
8.进给机构,所述进给机构用于驱动灯条从左向右移动;
9.上料机构,所述座板的有后方固接有支板,所述上料机构设置在支板对应位置,上料机构用于将灯珠本体输送到支板对应位置的安装槽中;
10.传动机构,所述传动机构用于实现进给机构和上料机构的联动,支板对应位置的安装槽中的灯珠本体焊接完成后,进给机构驱动灯条移动,并使下一个空置的安装槽对准上料机构,在传动机构的作用下,上料机构同步工作,将一个灯珠本体输送到该空置的安装槽中。
11.进一步地,所述进给机构包括进给螺杆、伺服电机和轨道块;所述座板上前后对称开设有轨道槽,所述进给螺杆转动连接在轨道槽中,进给螺杆的左端伸出到座板外并固接有第一从动轮,所述伺服电机固接在座板的下表面,伺服电机的输出轴上固接有与第一从动轮对应的第一主动轮,对应的第一主动轮和第一从动轮通过第一皮带联动,所述轨道块滑动连接在轨道槽中,轨道块的中心固接有螺纹套,所述进给螺杆啮合在螺纹套中,轨道块的上表面固接有l形的支杆,所述支杆的水平部上开设有螺纹槽,所述螺纹槽的外部啮合有
螺纹筒,所述螺纹筒靠近座板中心的一侧固接有圆盘,所述圆盘的内壁固接有橡胶垫。
12.进一步地,所述上料机构包括料筒、滑座、上料板和半齿轮;所述料筒的外部固接有安装框,安装框的四角处与座板之间固接有固定杆,料筒的位置与座板的位置对应,料筒的内腔与灯座适配,料筒的前后侧板内壁开设有与金属引脚适配的第一避让槽,所述支板上固接有竖板,所述竖板的前侧固接有轨道板,所述滑座与轨道板滑动连接,所述上料板固接在滑座的前侧,上料板的上表面与滑座的上表面平齐,且上料板的上下两侧分别与料筒以及轨道板贴合,上料板上中部开设有贯穿的输送槽,输送槽的前后两侧开设有第二避让槽,输送槽和第二避让槽分别与灯座以及金属引脚适配,料筒以及上料板的纵向宽度等于灯条的宽度;滑座的下方开设有移动槽,滑座的下表面固接有移动板,所述移动板的底部通过连接杆固接有齿条,移动槽的后侧开设有圆槽,圆槽的底部与移动板之间固接有伸缩杆,所述伸缩杆外套设有弹簧,所述弹簧的两端分别与移动板以及圆槽的底部固定连接,所述齿条的上表面固接有导向块,座板的下表面固接有导向杆,所述导向块与导向杆滑动连接,齿条右侧的座板下表面转动连接有轴杆,所述半齿轮固接在轴杆上,半齿轮与齿条啮合;
13.所述移动板与移动槽的后侧面接触时,所述弹簧处于自然长度,且此时上料板与料筒的竖向投影重合,且此时半齿轮与齿条开始啮合,设此时上料板的前侧与灯条的前侧之间的距离为m;
14.所述半齿轮与齿条啮合转动半圈时,所述上料板从后向前的移动距离为m;
15.所述输送槽的深度小于灯珠本体的高度,所述料筒的前侧板底部开设有缺口,所述安装槽的伸入大于灯珠本体的高度。
16.进一步地,所述料筒的左侧板内壁固接有定位条,所述安装槽的右侧开设有定位板,所述灯座的左侧开设有与定位条和定位板适配的定位槽。
17.进一步地,所述传动机构包括传动仓、第一转轴和第二转轴;所述传动仓固接在座板的右侧,传动仓内固接有两个隔板,所述隔板将传动腔分别前后的第一腔体以及中间的第二腔体,所述进给螺杆的右端伸入到第一腔体内并固接有主动锥齿轮,所述第一转轴转动连接在隔板内,第一转轴的两端对称固接有与主动锥齿轮啮合的从动锥齿轮,第一转轴上还固接有蜗杆,所述第二转轴转动连接在第二腔体内,第二转轴上固接有与蜗杆啮合的蜗轮,第二转轴的底部伸出到传动仓外并固接有第二主动轮,所述半齿轮的下方固接有第二从动轮,第二从动轮和第二主动轮通过第二皮带联动。
18.进一步地,所述主动锥齿轮和从动锥齿轮的齿数相同,所述第二从动轮和第二主动轮的直径相同,设蜗轮和蜗杆的传动比为i,相邻两个安装槽之间的距离为x,进给螺杆转动n圈时,轨道块的移动距离为x,则n=i。
19.进一步地,所述座板的上表面对应料筒的位置开设有风腔,所述风腔左侧的座板内开设有风道,座板的下表面固接有负压风机,所述负压风机的进口和出口分别固接有抽风管和排风管,所述抽风管的头部伸入到风道内,安装槽的底部密布有通孔。
20.进一步地,所述座板的前侧固接有倒顺开关,触摸延时开关和快退开关,还包括外部电源,所述触摸延时开关与快退开关构成第一并联回路,所述倒顺开关与伺服电机相互串联并共同与负压电机构成第二并联回路,第一并联回路、第二并联回路以及外部电源构成电流回路;
21.所述触摸延时开关的继电时长内,进给螺杆转动的圈数为n。
22.本发明的有益效果是,通过进给机构驱动灯条移动,通过上料机构将灯珠本体输送到灯条上对应的位置,通过传动机构实现进给机构和上料机构的联动,在焊接的时候,支板对应位置的安装槽中的灯珠本体焊接完成后,进给机构驱动灯条移动,并使下一个空置的安装槽对准上料机构,在传动机构的作用下,上料机构同步工作,将一个灯珠本体输送到该空置的安装槽中,从而实现自动化的进给和上料,提高批量焊接的便利性。
附图说明
23.为了更清楚地说明本发明的技术方案,下面将对具体实施方式描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
24.图1:本发明所述灯珠本体的结构示意图;
25.图2:本发明所述一种led灯珠焊线批量焊接辅助工具的轴测图;
26.图3:本发明所述一种led灯珠焊线批量焊接辅助工具下方的立体示意图;
27.图4:本发明所述一种led灯珠焊线批量焊接辅助工具的俯视图;
28.图5:图4所示a-a方向的剖视图;
29.图6:图4所示b-b方向的剖视图;
30.图7:本发明所述上料板和灯条重合时的结构示意图;
31.图8:本发明所述灯珠本体和灯条的配合示意图;
32.图9:本发明所述灯珠本体焊接完成后的接线示意图;
33.图10:本发明所述灯条的半剖视图;
34.图11:本发明所述座板位置的水平剖视图;
35.图12:本发明所述进给机构、上料机构和传动机构的传动示意图;
36.图13:本发明所述座板的半剖视图;
37.图14:本发明所述一种led灯珠焊线批量焊接辅助工具的电路控制连接示意图。
38.附图标记如下:
39.1-灯珠本体,11-灯座,12-灯罩,13-金属引脚,14-插槽,
40.2-座板,21-限位条,22-支板,
41.3-灯条,31-安装槽,32-凹槽,33-接电板,34-接电块,35-金属插块,
42.41-进给螺杆,42-伺服电机,43-轨道块,44-轨道槽,45-第一从动轮,46-第一主动轮,47-第一皮带,48-螺纹套,49-支杆,410-螺纹槽,411-螺纹筒,412-圆盘,413-橡胶垫,
43.51-料筒,52-滑座,53-上料板,54-半齿轮,55-安装框,56-固定杆,57-第一避让槽,58-竖板,59-轨道板,510-输送槽,511-第二避让槽,512-移动槽,513-移动板,514-连接杆,515-齿条,516-圆槽,517-伸缩杆,518-弹簧,519-导向块,520-导向杆,521-轴杆,522-缺口,523-定位条,524-定位板,525-定位槽,
44.61-传动仓,62-第一转轴,63-第二转轴,64-隔板,65-主动锥齿轮,66-从动锥齿轮,67-蜗杆,68-蜗轮,69-第二主动轮,610-第二从动轮,611-第二皮带,
45.71-风腔,72-风道,73-负压风机,74-抽风管,75-排风管,76-通孔,
46.81-倒顺开关,82-触摸延时开关,83-快退开关,84-外部电源。
具体实施方式
47.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
48.如图1-14所示,本发明具有以下五个具体实施例。
49.实施例1
50.一种led灯珠焊线批量焊接辅助工具,包括灯珠本体1,灯珠本体1包括灯座11以及固接在灯座11上的灯罩12,灯罩12内设有led发光管,灯座11的前后两侧对称固接有金属引脚13,两个金属引脚13分别与led发光管的正负极电性连接,还包括:
51.座板2,座板2的上表面间隔固接有两根横向的限位条21;
52.灯条3,灯条3滑动连接在限位条21之间,金属引脚13为l形,金属引脚13的水平部上开设有插槽14,灯条3的上表面横向均匀开设有与灯座11适配的安装槽31,安装槽31前后两侧的灯条3上开设有与金属引脚13适配的凹槽32,灯条3的前后两侧对应凹槽32的位置固接有接电板33,接电板33的右端固接有接电块34,接电板33对应各凹槽32的位置电性连接有金属插块35,金属插块35与插槽14适配;
53.进给机构,进给机构用于驱动灯条3从左向右移动;
54.上料机构,座板2的有后方固接有支板22,上料机构设置在支板22对应位置,上料机构用于将灯珠本体1输送到支板22对应位置的安装槽31中;
55.传动机构,传动机构用于实现进给机构和上料机构的联动,支板22对应位置的安装槽31中的灯珠本体1焊接完成后,进给机构驱动灯条3移动,并使下一个空置的安装槽31对准上料机构,在传动机构的作用下,上料机构同步工作,将一个灯珠本体1输送到该空置的安装槽31中。
56.本实施例中:
57.如图1所示,焊接的时候,首先将灯条3置于限位条21之间,最右侧的安装槽31与上料机构对准,在最右侧的安装槽31中放入待焊接的灯珠本体1,通过手持式焊枪进行锡焊。
58.初次焊接完成后,进给机构驱动灯条3从左向右移动,使得下一个空置的安装槽31对准上料机构,在传动机构的作用下,上料机构同步工作,将一个新的灯珠本体1输送到该控制的安装槽31中,通过手持式焊枪完成锡焊操作。
59.然后进给机构、传动机构和上料再次工作,完成灯条3的进给以及灯珠本体1的上料,如此循环,即可实现批量的焊接工作。
60.本装置可以完成自动化的进给和上料操作,提高批量焊接时的便利性。
61.如图1和8所示,灯珠本体1进入到安装槽31中时,金属引脚13的水平部进入到凹槽32中,且插槽14和金属插块35插接,在锡焊的过程中,金属插块35从插槽14中穿插而过,锡焊完成后,金属引脚13具有更好的接电性能。
62.如图9所示,批量的灯珠本体1焊接完成后,两个接电块34分别与电源的正负极电性连接,即可使得批量的灯珠本体1均完成接电。
63.实施例2
64.与实施例1不同的地方在于,本实施例进一步公开了进给机构的技术特征,通过进
给机构驱动灯条3移动。
65.进给机构包括进给螺杆41、伺服电机42和轨道块43;座板2上前后对称开设有轨道槽44,进给螺杆41转动连接在轨道槽44中,进给螺杆41的左端伸出到座板2外并固接有第一从动轮45,伺服电机42固接在座板2的下表面,伺服电机42的输出轴上固接有与第一从动轮45对应的第一主动轮46,对应的第一主动轮46和第一从动轮45通过第一皮带47联动,轨道块43滑动连接在轨道槽44中,轨道块43的中心固接有螺纹套48,进给螺杆41啮合在螺纹套48中,轨道块43的上表面固接有l形的支杆49,支杆49的水平部上开设有螺纹槽410,螺纹槽410的外部啮合有螺纹筒411,螺纹筒411靠近座板2中心的一侧固接有圆盘412,圆盘412的内壁固接有橡胶垫413。
66.本实施例中:
67.如图1和2所示,伺服电机42工作时带动第一主动轮46转动,第一主动轮46通过第一皮带47带动第一从动轮45转动,从而各进给螺杆41同步转动,如图11所示,轨道槽44的内壁开设有滑槽,轨道块43的前后两侧固接有滑块,轨道块43通过滑块与滑槽的配合滑动连接在轨道槽44中,且轨道块43的中部固接有与进给螺杆41啮合的螺纹套48,进给螺杆41转动时,轨道块43横向移动。
68.假设进给螺杆41正转时驱动轨道块43从左向右移动,进给螺杆41反转时驱动轨道块43从右向左移动。
69.初始状态时,使伺服电机42反转,将轨道块43移动到左侧,如图5所示,转动螺纹筒411使橡胶垫413夹紧灯条3,然后使伺服电机42正转,轨道块43从左向右移动,即可使得灯条3从左向右进给。
70.实施例3
71.与实施例2不同的地方在于,本实施例进一步公开了上料机构的技术特征,通过上料机构将灯珠本体1输入到安装槽31中。
72.上料机构包括料筒51、滑座52、上料板53和半齿轮54;料筒51的外部固接有安装框55,安装框55的四角处与座板2之间固接有固定杆56,料筒51的位置与座板2的位置对应,料筒51的内腔与灯座11适配,料筒51的前后侧板内壁开设有与金属引脚13适配的第一避让槽57,支板22上固接有竖板58,竖板58的前侧固接有轨道板59,滑座52与轨道板59滑动连接,上料板53固接在滑座52的前侧,上料板53的上表面与滑座52的上表面平齐,且上料板53的上下两侧分别与料筒51以及轨道板59贴合,上料板53上中部开设有贯穿的输送槽510,输送槽510的前后两侧开设有第二避让槽511,输送槽510和第二避让槽511分别与灯座11以及金属引脚13适配,料筒51以及上料板53的纵向宽度等于灯条3的宽度;滑座52的下方开设有移动槽512,滑座52的下表面固接有移动板513,移动板513的底部通过连接杆514固接有齿条515,移动槽512的后侧开设有圆槽516,圆槽516的底部与移动板513之间固接有伸缩杆517,伸缩杆517外套设有弹簧518,弹簧518的两端分别与移动板513以及圆槽516的底部固定连接,齿条515的上表面固接有导向块519,座板2的下表面固接有导向杆520,导向块519与导向杆520滑动连接,齿条515右侧的座板2下表面转动连接有轴杆521,半齿轮54固接在轴杆521上,半齿轮54与齿条515啮合;
73.移动板513与移动槽512的后侧面接触时,弹簧518处于自然长度,且此时上料板53与料筒51的竖向投影重合,且此时半齿轮54与齿条515开始啮合,设此时上料板53的前侧与
灯条3的前侧之间的距离为m;
74.半齿轮54与齿条515啮合转动半圈时,上料板53从后向前的移动距离为m;
75.输送槽510的深度小于灯珠本体1的高度,料筒51的前侧板底部开设有缺口522,安装槽31的伸入大于灯珠本体1的高度。
76.本实施例中:
77.如图3、6以及12所示,初始状态时,上料板53位于料筒51的正下方,半齿轮54刚好与齿条515啮合。
78.在料筒51中层叠放入灯珠本体1,最下方的灯珠本体1进入到输送槽510中,在轨道板59的作用下,灯珠本体1不会从输送槽510中落下。
79.在进给机构工作时,传动机构带动半齿轮54转动,半齿轮54与齿条515啮合转动时,拉动齿条515从后向前运动,齿条515、连接杆、移动板513、滑座52和上料板53的一体结构从后向前移动,当半齿轮54转动半圈时,上料板53位于灯条3的正上方,输送槽510与安装槽31对齐,即运动到图7所示的状态时,灯珠本体1进入输送槽510中。
80.半齿轮54转动半圈完成灯珠本体1的上料后,半齿轮54与齿条515脱离啮合,在弹簧518的作用下移动板513复位,即由图7所示的状态返回到图6所示的状态,料筒51最下方的灯珠本体1继续进入到输送槽510中,与此同时,半齿轮54空转半圈,再次恢复到与齿条515初始啮合的状态。
81.作为本实施例进一步的实施方式,料筒51的左侧板内壁固接有定位条523,安装槽31的右侧开设有定位板524,灯座11的左侧开设有与定位条523和定位板524适配的定位槽525。
82.本实施方式中:
83.由于设置有定位条523和定位槽525,灯珠本体1在层叠放置到料筒51中时,通过定位条523和定位槽525的配合,使得灯珠本体1的朝向一致,由于两个金属引脚13分别为正极引脚和负极引脚,当朝向一致时,各灯珠本体1的正极引脚和负极引脚一致,在上料后,可以避免将金属引脚13焊反。
84.灯珠本体1进入安装槽31中后,通过定位板524和定位槽525的配合对灯珠本体1进行限位卡合。
85.实施例4
86.在实施例3的基础上,本实施例进一步公开了传动机构的技术特征,通过传动机构实现进给机构和上料机构的联动,从而实现自动化的进给和上料过程。
87.传动机构包括传动仓61、第一转轴62和第二转轴63;传动仓61固接在座板2的右侧,传动仓61内固接有两个隔板64,隔板64将传动腔分别前后的第一腔体以及中间的第二腔体,进给螺杆41的右端伸入到第一腔体内并固接有主动锥齿轮65,第一转轴62转动连接在隔板64内,第一转轴62的两端对称固接有与主动锥齿轮65啮合的从动锥齿轮66,第一转轴62上还固接有蜗杆67,第二转轴63转动连接在第二腔体内,第二转轴63上固接有与蜗杆67啮合的蜗轮68,第二转轴63的底部伸出到传动仓61外并固接有第二主动轮69,半齿轮54的下方固接有第二从动轮610,第二从动轮610和第二主动轮69通过第二皮带611联动。
88.优选的,主动锥齿轮65和从动锥齿轮66的齿数相同,第二从动轮610和第二主动轮69的直径相同,设蜗轮68和蜗杆67的传动比为i,相邻两个安装槽31之间的距离为x,进给螺
杆41转动n圈时,轨道块43的移动距离为x,则n=i。
89.本实施例中:
90.如图11和12所示,进给机构工作时,进给螺杆41转动,从而主动锥齿轮65转动,主动锥齿轮65带动与其啮合的从动锥齿轮66转动,从而第一转轴62和蜗杆67转动,蜗杆67带动与其啮合的蜗轮68转动,从而第二转轴63和第二主动轮69转动,在第二皮带611的作用下,第二从动轮610转动,从而轴杆521和半齿轮54同步转动,即进给机构和上料机构同步工作。
91.进给机构工作时带动灯条3移动,且灯条3每次移动的距离为相邻两个安装槽31之间的距离,记为x,即进给螺杆41转动n圈时,灯条3完成一次进给。
92.由于蜗轮68和蜗杆67的传动比为i,即蜗杆67转动一圈时,蜗轮68转动的角度为(360/i)
°
,要使进给机构工作一次时,上料机构完成一次上料,即要在进给机构工作的时间内,半齿轮54转动360
°
,即进给螺杆41转动n圈时,半齿轮54转动一圈,即360/i*n=360,即n=i。
93.通过传动机构的设置,进给螺杆41转动n圈完成一次进给时,半齿轮54转动一圈完成一次上料过程。
94.实施例5
95.座板2的上表面对应料筒51的位置开设有风腔71,风腔71左侧的座板2内开设有风道72,座板2的下表面固接有负压风机73,负压风机73的进口和出口分别固接有抽风管74和排风管75,抽风管74的头部伸入到风道72内,安装槽31的底部密布有通孔76。
96.优选的,座板2的前侧固接有倒顺开关81,触摸延时开关82和快退开关83,还包括外部电源84,触摸延时开关82与快退开关83构成第一并联回路,倒顺开关81与伺服电机42相互串联并共同与负压电机构成第二并联回路,第一并联回路、第二并联回路以及外部电源84构成电流回路;
97.触摸延时开关82的继电时长内,进给螺杆41转动的圈数为n。
98.本实施例中:
99.如图13所示,为使得输送槽510中的灯珠本体1顺利的进入到安装槽31中,设置有负压风机73,当输送槽510与安装槽31对齐时,负压电机工作,负压风机73通过抽风管74、风道72和风腔71抽风,并通过通孔76将抽吸力作用于安装槽31位置,从而将灯珠本体1吸下。
100.如图14所示,初始状态时,将倒顺开关81置于“倒位”,合上快退开关83,从而伺服电机42反转,轨道块43快速复位。
101.在焊接的过程中,通过触动触摸延时开关82,使得伺服电机42和负压风机73工作固定的时间,具体的,设置触摸延时开关82的继电时长,使得在触摸延时开关82的继电时长内,进给螺杆41转动的圈数为n,即触摸延时开关82每触动依次,完成一次进给操作和上料操作。
102.以上公开的本发明优选实施例只是用于帮助阐述本发明。优选实施例并没有详尽叙述所有的细节,也不限制该发明仅为的具体实施方式。显然,根据本说明书的内容,可作很多的修改和变化。本说明书选取并具体描述这些实施例,是为了更好地解释本发明的原理和实际应用,从而使所属技术领域技术人员能很好地理解和利用本发明。本发明仅受权利要求书及其全部范围和等效物的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1