一种智能手表生产用弹性自锁夹紧机构的制作方法
1.本发明涉及辅助夹具技术领域,尤其公开了一种智能手表生产用弹性自锁夹紧机构。
背景技术:
2.手表生产时,表带需要对其固定冲孔。现有的大多数表带都会使用夹具对其固定冲孔,现有表带冲孔时的夹具一般具有弹性自锁功能,便于固定,但是这种具有弹性自锁功能的夹具往往会将表带锁的很紧,当表带锁得很紧且若是表带自身具有弹性的时候,这种结构会将表带表面压制形变,导致表带冲孔结束收缩之后,表带上孔的形状大于原有尺寸大小,现有存在的技术结构可参照cn212623622u,或者参照实际生产过程。
3.因此,现有具有弹性自锁功能的夹具夹持时会将表带表面压制形变,导致表带冲孔结束收缩之后,表带上孔的形状大于原有尺寸大小,是目前亟待解决的技术问题。
技术实现要素:
4.本发明提供了一种智能手表生产用弹性自锁夹紧机构,旨在解决现有具有弹性自锁功能的夹具夹持时会将表带表面压制形变,导致表带冲孔结束收缩之后,表带上孔的形状大于原有尺寸大小的技术问题。
5.本发明涉及一种智能手表生产用弹性自锁夹紧机构,包括接料槽、夹紧装置和负压吸引装置,夹紧装置设于接料槽上部用于夹紧待加工智能手表表带的两侧;负压吸引装置设于接料槽下方用于产生负压力以吸附待加工智能手表表带的底部,负压吸引装置包括第一驱动组件、负压罐和负压吸附管路,第一驱动组件与负压罐上的活塞柱相连接,负压罐的负压输出端与负压吸附管路相接通,负压吸附管路上依序设有冲击材料、阻挡圈和垫片,垫片设于负压吸附管路的出口处且位于接料槽上;阻挡圈设于垫片下方,用于挡住冲击材料冲孔时漏料。
6.进一步地,负压吸附管路包括第一负压吸附管路和第二负压吸附管路,第一负压吸附管路从下至上依次设有第一冲击材料、第一阻挡圈和第一垫片,第二负压吸附管路依序设有第二冲击材料、第二阻挡圈和第二垫片,第一负压吸附管路和第二负压吸附管路分别与负压罐上活塞腔的两端相连通,用于同步带动第一冲击材料和第二冲击材料动作,依次释放安放在第一垫片和第二垫片上的待加工智能手表表带。
7.进一步地,第一驱动组件包括第一气缸、连接板、连接杆和安装架,第一气缸的一端与安装架相铰接,第一气缸的另一端与连接板的中央固定连接;连接板的一端与安装架相铰接,连接板的另一端与连接杆的一端相连接,连接杆的另一端与负压罐上的活塞柱相铰接。
8.进一步地,负压罐包括活塞柱、活塞腔、罐体和活塞,活塞腔设于罐体内,活塞柱的一端与活塞固定连接且活塞伸入活塞腔内,位于活塞两侧的活塞腔内分别设有第一出气孔和第二出气孔,第一垫片和第一阻挡圈从上至下依次设于第一出气孔的出气口处,第二垫
片和第二阻挡圈从上至下依次设于第二出气孔的出气口处。
9.进一步地,第一冲击材料包括第一弹簧及抵接于第一弹簧上的第一小球;第二冲击材料包括第二弹簧及抵接于第二弹簧的第二小球。
10.进一步地,夹紧装置包括第二气缸、第一滑槽、推动块、抵触轴和第二驱动组件,第二气缸的一端固定于接料槽上,第二气缸的另一端分别与第一滑槽和第二驱动组件相连接,推动块的一端与第一滑槽相铰接,推动块的另一端与抵触轴相铰接。
11.进一步地,第二驱动组件包括第一驱动板、第二驱动板、第三弹簧、固定柱、滑臂、旋转块、调节棒和基座,固定柱的一端与第一驱动板固定连接,固定柱的另一端与第二驱动板活动连接,第三弹簧套设于固定柱上且第三弹簧的两端分别抵接于第一驱动板和第二驱动板上,滑臂的一端与第二驱动板的一侧相铰接,滑臂的另一端与旋转块相铰接,调节棒的一端与第二驱动板的底部相连接,调节棒的另一端与基座滑动连接。
12.进一步地,第二驱动组件还包括第一伸缩杆、架体和伸缩架,伸缩架的一端与第二驱动板固定连接,伸缩架的另一端与第一伸缩杆固定连接,伸缩架活动架设于架体上。
13.进一步地,第二驱动组件还包括第二伸缩杆、限位杆、滑杆、第四弹簧、第三小球和限位孔,限位杆与第二伸缩杆固定连接,第四弹簧设于限位杆的腔体内,第四弹簧的一端与限位杆的腔体内壁相抵接,第四弹簧的另一端与滑杆相抵接,滑杆远离第四弹簧的一端伸出限位杆的腔体外并通过第三小球抵接于限位孔上。
14.进一步地,接料槽上设有滑动调节机构,滑动调节机构包括夹板、第二滑槽、螺丝和螺母,螺丝可在第二滑槽内相对移动,螺丝穿过夹板和第二滑槽后与螺母相锁定。
15.本发明所取得的有益效果为:
16.本发明提供一种智能手表生产用弹性自锁夹紧机构,采用接料槽、夹紧装置和负压吸引装置,夹紧装置设于接料槽上部用于夹紧待加工智能手表表带的两侧;负压吸引装置设于接料槽下方用于产生负压力以吸附待加工智能手表表带的底部,负压吸引装置包括第一驱动组件、负压罐和负压吸附管路,第一驱动组件与负压罐上的活塞柱相连接,负压罐的负压输出端与负压吸附管路相接通,负压吸附管路上依序设有冲击材料、阻挡圈和垫片,垫片设于负压吸附管路的出口处且位于接料槽上;阻挡圈设于垫片下方,用于挡住冲击材料冲孔时漏料。本发明提供的智能手表生产用弹性自锁夹紧机构,将待加工智能手表表带放置于垫片上,通过负压吸引装置产生的负压力对待加工智能手表表带底部进行吸附,并由夹紧装置对待加工智能手表表带的两侧进行夹紧,不会将表带表面压制形变,夹具精度好、夹持效果好,从而有效防止冲孔时机器打歪,提高智能手表生产质量;并在夹持完毕后,通过负压吸引装置产生的冲击力来对垫片上已加工好的智能手表表带进行冲料,提高生产效率,降低加工成本。
附图说明
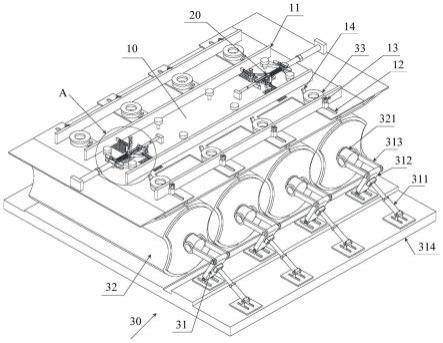
17.图1为本发明提供的智能手表生产用弹性自锁夹紧机构一实施例的立体结构示意图;
18.图2为图1中所示的负压吸引装置一实施例的剖切示意图;
19.图3为图1中所示的a部分的局部放大示意图;
20.图4为图1中所示的夹紧装置第一实施例的部分结构示意图;
21.图5为图1中所示的夹紧装置第二实施例的部分结构示意图。
22.附图标号说明:
23.10、接料槽;20、夹紧装置;30、负压吸引装置;31、第一驱动组件;32、负压罐;33、负压吸附管路;331、阻挡圈;332、垫片;333、冲击材料;334、第一负压吸附管路;335、第二负压吸附管路;3313、第一冲击材料;3312、第一垫片;3311、第一阻挡圈;3323、第二冲击材料;3321、第二阻挡圈;3322、第二垫片;311、第一气缸;312、连接板;313、连接杆;314、安装架;321、活塞柱;322、活塞腔;323、罐体;324、活塞;3241、第一出气孔;3242、第二出气孔;33131、第一弹簧;33132、第一小球;33231、第二弹簧;33232、第二小球;21、第二气缸;22、第一滑槽;23、推动块;24、抵触轴;25、第二驱动组件;251、第一驱动板;252、第二驱动板;253、第三弹簧;254、固定柱;255、滑臂;256、旋转块;257、调节棒;258、基座;2591、第一伸缩杆;2592、架体;2593、伸缩架;2594、第二伸缩杆;2595、限位杆;2596、滑杆;2597、第四弹簧;2598、第三小球;2599、限位孔;11、夹板;12、第二滑槽;13、螺丝;14、等高块。
具体实施方式
24.为了更好的理解上述技术方案,下面将结合说明书附图以及具体的实施方式对上述技术方案做详细的说明。
25.如图1至图5所示,本发明第一实施例提出一种智能手表生产用弹性自锁夹紧机构,包括接料槽10、夹紧装置20和负压吸引装置30,夹紧装置20设于接料槽10上部用于夹紧待加工智能手表表带的两侧;负压吸引装置30设于接料槽10下方用于产生负压力以吸附待加工智能手表表带的底部,负压吸引装置30包括第一驱动组件31、负压罐32和负压吸附管路33,第一驱动组件31与负压罐32上的活塞柱321相连接,负压罐32的负压输出端与负压吸附管路33相接通,负压吸附管路33上依序设有冲击材料333、阻挡圈331和垫片332,垫片332设于负压吸附管路33的出口处且位于接料槽10上;阻挡圈331设于垫片332下方,用于挡住冲击材料333冲孔时漏料。在本实施例中,将待加工智能手表表带放置于垫片332上,通过负压吸引装置30产生的负压力对待加工智能手表表带底部进行吸附,并由夹紧装置20对待加工智能手表表带的两侧进行夹紧,不会将表带表面压制形变,夹具精度好、夹持效果好,从而有效防止冲孔时机器打歪,提高智能手表生产质量;并在夹持完毕后,通过负压吸引装置30产生的冲击力来对垫片332上已加工好的智能手表表带进行冲料,释放已加工好的智能手表表带,从而提高生产效率,降低加工成本。
26.在上述结构中,请见图1至图5,本实施例提出的智能手表生产用弹性自锁夹紧机构,负压吸附管路33包括第一负压吸附管路334和第二负压吸附管路335,第一负压吸附管路334从下至上依次设有第一冲击材料3313、第一阻挡圈3311和第一垫片3312,第二负压吸附管路335上依序设有第二冲击材料3323、第二阻挡圈3321和第二垫片3322,第一负压吸附管路334和第二负压吸附管路335分别与负压罐32上活塞腔322的两端相连通,用于同步带动第一冲击材料3313和第二冲击材料3323动作,依次释放安放在第一垫片3312和第二垫片3322上的待加工智能手表表带。本实施例提出的智能手表生产用弹性自锁夹紧机构,通过负压罐32的作用下,同步带动第一负压吸附管路334上的第一冲击材料3313和第二负压吸附管路335上的第二冲击材料3323动作,依次释放安放在第一垫片3312和第二垫片3322上的待加工智能手表表带,提高生产效率,降低加工成本。
27.进一步地,参见图1至图5,本实施例提出的智能手表生产用弹性自锁夹紧机构,第一驱动组件31包括第一气缸311、连接板312、连接杆313和安装架314,第一气缸311的一端与安装架314相铰接,第一气缸311的另一端与连接板312的中央固定连接;连接板312的一端与安装架314相铰接,连接板312的另一端与连接杆313的一端相连接,连接杆313的另一端与负压罐32上的活塞柱321相铰接。负压罐32包括活塞柱321、活塞腔322、罐体323和活塞324,活塞腔322设于罐体323内,活塞柱321的一端与活塞324固定连接且活塞324伸入活塞腔322内,位于活塞324两侧的活塞腔322内分别设有第一出气孔3241和第二出气孔3242,第一垫片3312和第一阻挡圈3311从上至下依次设于第一出气孔3241的出气口处,第二垫片3322和第二阻挡圈3321从上至下依次设于第二出气孔3242的出气口处。在本实施例中,第一冲击材料3313包括第一弹簧33131及抵接于第一弹簧33131上的第一小球33132;第二冲击材料3323包括第二弹簧33231及抵接于第二弹簧33231上的第二小球33232。本实施例提供的智能手表生产用弹性自锁夹紧机构,通过第一气缸311来带动连接板312活动,连接板312在翻转的时候通过负压罐32外部的连接杆313拉动活塞柱321,使得活塞柱321往右侧拉动活塞,当活塞向右运动时,第一垫片3312进气,第二垫片3322出气;当活塞向左运动时,第一垫片3312出气,第二垫片3322进气。当活塞324往左移动时,将位于第一垫片3312下方的第一阻挡圈3311上的第一冲击材料3313由于气体冲到接料槽10上;当活塞324往右移动时位于第二垫片3322下方的第二阻挡圈3321上的第二冲击材料3323由于气体冲到接料槽10上,这样就能使得两个垫片都能依次安放表带,提高生产效率,并且在吸附力作用下,智能手表表带平面不会产生形变。
28.进一步地,请见图1至图5,本实施例提出的智能手表生产用弹性自锁夹紧机构,夹紧装置20包括第二气缸21、第一滑槽22、推动块23、抵触轴24和第二驱动组件25,第二气缸21的一端固定于接料槽10上,第二气缸21的另一端分别与第一滑槽22和第二驱动组件25相连接,推动块23的一端与第一滑槽22相铰接,推动块23的另一端与抵触轴24相铰接。具体地,第二驱动组件25包括第一驱动板251、第二驱动板252、第三弹簧253、固定柱254、滑臂255、旋转块256、调节棒257和基座258,固定柱254的一端与第一驱动板251固定连接,固定柱254的另一端与第二驱动板252活动连接,第三弹簧253套设于固定柱254上且第三弹簧253的两端分别抵接于第一驱动板251和第二驱动板252上,滑臂255的一端与第二驱动板252的一侧相铰接,滑臂255的另一端与旋转块256相铰接,调节棒257的一端与第二驱动板252的底部相连接,调节棒257的另一端与基座258滑动连接。第二驱动组件25还包括第一伸缩杆2591、架体2592和伸缩架2593,伸缩架2593的一端与第二驱动板252固定连接,伸缩架2593的另一端与第一伸缩杆2591固定连接,伸缩架2593活动架设于架体2592上。第二驱动组件25还包括第二伸缩杆2594、限位杆2595、滑杆2596、第四弹簧2597、第三小球2598和限位孔2599,限位杆2595与第二伸缩杆2594固定连接,第四弹簧2597设于限位杆2595的腔体内,第四弹簧2597的一端与限位杆2595的腔体内壁相抵接,第四弹簧2597的另一端与滑杆2596相抵接,滑杆2596远离第四弹簧2597的一端伸出限位杆2595的腔体外并通过第三小球2598抵接于限位孔2599上。本实施例提出的智能手表生产用弹性自锁夹紧机构,将表带安放在接料槽10上方的垫片332上,通过第二气缸21推动第一滑槽22活动,然后当第一滑槽22活动的时候,通过驱动推动块23在抵触轴24上做翻转活动来压缩第二驱动组件25上的第一驱动板251动作,当第二驱动板252在固定柱254上滑动的时候,第三弹簧253驱动滑臂255在
固定柱254上滑动,滑臂255在固定柱254上滑动时,连接在旋转块256上的滑杆2596动作,进而来压缩第四弹簧2597活动,推动固定块带动夹板11接触表带一端,然后限位杆2595随着旋转块256活动而活动,在限位孔2599上爬行,限位杆2595内部具有第四弹簧2597将滑杆2596压缩下压,使得滑杆2596下部第三小球2598抵触到限位孔2599上。本实施例提出的智能手表生产用弹性自锁夹紧机构,由夹紧装置对待加工智能手表表带的两侧进行夹紧,不会将表带表面压制形变,夹具精度好、夹持效果好,从而有效防止冲孔时机器打歪,提高智能手表生产质量。
29.优选地,参见图1至图5,本实施例提出的智能手表生产用弹性自锁夹紧机构,接料槽10上设有滑动调节机构,滑动调节机构包括夹板11、第二滑槽12、螺丝13和螺母,螺丝13可在第二滑槽12内相对移动,螺丝13穿过夹板11和第二滑槽12后与螺母相锁定。本实施例提出的智能手表生产用弹性自锁夹紧机构,夹板11通过螺丝13固定在接料槽10上方,接料槽10通过中间的第二滑槽12分为两层,在第二滑槽12内部可塞入螺母将螺丝13紧固,从而实现对夹板11在接料槽10上滑动调节,进一歩方便不同宽度的表带的夹紧。
30.如图1至图5所示,本实施例提供的智能手表生产用弹性自锁夹紧机构,其工作原理为:
31.等高块14和垫片332平齐,使得夹紧装置20将智能手表表带与垫片332接触的时候,防止智能手表表带两侧拱起。夹板11通过螺丝13固定在接料槽10上方,其中,接料槽10通过中间的第二滑槽12分为两层,在第二滑槽12内部可塞入螺母将螺丝13紧固,从而实现对夹板11在接料槽10上滑动调节,进一歩方便不同宽度的表带的夹紧。
32.将智能手表表带放入到垫片332上方,然后驱动第一气缸311,第一气缸311在驱动的时候带动连接板312活动,连接板312在翻转的时候通过负压罐32外部的连接杆313拉动活塞柱321,使得活塞柱321往右侧拉动活塞,当活塞324向右运动时,第一垫片3312进气,第二垫片3322出气;当活塞324向左运动时,第一垫片3312出气,第二垫片3322进气。阻挡圈331用于挡住冲孔时候漏料,然后随着上述流程图中,当活塞324往左移动时,将位于第一垫片3312下方的第一阻挡圈3311上的第一冲击材料3313由于气体冲到接料槽10上。当活塞324往右移动时位于第二垫片3322下方的第二阻挡圈3321上的第二冲击材料3323由于气体冲到接料槽10上,这样就能使得两个垫片都能依次安放表带,能提高效率,并且在吸附力作用下,表带平面不会产生形变。
33.另外将表带安放在接料槽10上方的垫片332上时,可以驱动第二气缸21推动第一滑槽22活动,然后当第一滑槽22活动的时候通过驱动推动块23在抵触轴24上做翻转活动,来压缩第二驱动组件25上的第一驱动板251动作,当第二驱动板252在固定柱254上滑动的时候,第三弹簧253(第三弹簧253一端为自由端,第三弹簧253另外一端和滑臂255相抵接),第三弹簧253驱动滑臂255在固定柱254上滑动,滑臂255在固定柱254上滑动时,连接在旋转块256上的滑杆2596(滑杆2596一端可以和接料槽10固定),进而来压缩第四弹簧2597活动(第四弹簧2597套设于滑杆2596上),推动固定块带动夹板11接触表带一端,然后限位杆2595随着旋转块256活动而活动,在限位孔2599上爬行,限位杆2595内部具有第四弹簧2597将滑杆2596压缩下压,使得滑杆2596下部第三小球2598抵触到限位孔2599上。
34.当实施时,当推动块23旋转过渡超过第一驱动板251的时候(刚接触到表带一端时),第三弹簧253和驱动板分离,第三弹簧253恢复到常态,滑臂255失去驱动力,然后限位
杆2595停止在限位孔2599上爬行将,由于滑杆2596下部第三小球2598抵触到限位孔2599上,制止滑杆2596在限位孔2599退格,当夹板11需要分离表带一端时,通过旋转块256上方的第二伸缩杆2594上升,使得限位杆2595上升,将滑杆2596上升带动第三小球2598脱离,脱离瞬间,第三弹簧253的反弹力将滑臂255在滑杆2596上原路返回,然后再驱动第一伸缩杆2591带动第一驱动板251背离第二气缸21方向活动,使得第三弹簧253脱离两个推动块23之间,最后将第二气缸21反向驱动回缩,将两个推动块23复位即可。
35.本实施例提供的智能手表生产用弹性自锁夹紧机构,同现有技术相比,采用接料槽、夹紧装置和负压吸引装置,夹紧装置设于接料槽上部用于夹紧待加工智能手表表带的两侧;负压吸引装置设于接料槽下方用于产生负压力以吸附待加工智能手表表带的底部,负压吸引装置包括第一驱动组件、负压罐和负压吸附管路,第一驱动组件与负压罐上的活塞柱相连接,负压罐的负压输出端与负压吸附管路相接通,负压吸附管路上依序设有冲击材料、阻挡圈和垫片,垫片设于负压吸附管路的出口处且位于接料槽上;阻挡圈设于垫片下方,用于挡住冲击材料冲孔时漏料。本实施例提供的智能手表生产用弹性自锁夹紧机构,将待加工智能手表表带放置于垫片上,通过负压吸引装置产生的负压力对待加工智能手表表带底部进行吸附,并由夹紧装置对待加工智能手表表带的两侧进行夹紧,不会将表带表面压制形变,夹具精度好、夹持效果好,从而有效防止冲孔时机器打歪,提高智能手表生产质量;并在夹持完毕后,通过负压吸引装置产生的冲击力来对垫片上已加工好的智能手表表带进行冲料,提高生产效率,降低加工成本。
36.尽管已描述了本发明的优选实施例,但本领域内的技术人员一旦得知了基本创造性概念,则可对这些实施例作出另外的变更和修改。所以,所附权利要求意欲解释为包括优选实施例以及落入本发明范围的所有变更和修改。显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1