折弯装置及控制系统的制作方法
1.本发明是折弯装置及控制系统,具体涉及一种金属板自动上料、自动定位、自动转换角度的折弯生产装置,属于金属板的无切削的加工装置技术领域。
背景技术:
2.折弯机是一种用于折弯板状材料的设备,折弯原理为将工件放置于下模的平面上,当上模压向下模时,工件在压力和上下模的作用下形成一个折弯角度,在绝大部分的折弯机上,都采用人工反复更换模口,以适应不同板料工件的加工,特别是板料折弯后再复平,然后再折弯的情况,板厚就增加了一倍,有的折弯机还需要人工上下板材,费时费力而且容易造成工伤事故,工作效率大大降低,另外如何精确控制工件的折弯角度是折弯机生产商和应用商都比较关注的问题,有些方法中使用的传动方式为钢丝柔性传动,并需要扭簧回复到初始位置,并用扭簧带动角度传感器或编码器来测量扭簧形变的角度,来测量板材折弯的角度,但是此种方法也有缺点,扭簧在每一次形变的过程中,会产生老化,时间稍微一长,每次产生的形变就会不同,会照成测量结果不准确的现象,因此,本领域技术人员提供了一种可自动调整角度的折弯装置,来解决上述背景技术中提出的问题。
3.例如在2015年11月18日公开了一项公开号为cn102927958u的折弯机折弯角度实时自动测量装置,该发明公开了折弯机折弯角度实时自动测量装置,滑杆上套装两块滑块,滑块上铰接摆杆,在铰接点设扭簧,摆杆的顶端设有测量面,测量面与左、右摆杆垂直,滑块上设摆杆限位凸起,在测量面不受力时,左、右摆杆处于竖直状态,通过摆杆转动角度测量机构同时测量工件两侧的折弯角度,从而得到工件的折弯角度,该发明装置,结构简单,动作可靠,采用测量折弯件两侧的折弯角度 从而计算整个工件的折弯角度的方法,不受上下冲模对齐精度的影响,测量结果更准确,上述装置同时测量折弯件两侧的折弯角度从而计算整个工件的折弯角度的方法,不受上下冲模对齐精度的影响,测量结果更准确,但仍具有以下缺点:1、上述折弯机装置在进行材料折弯时,还需要根据不同的折弯角度,来频繁的更换下模,而且两侧还没有折弯的尺寸测量装置,需要人工上下板材和定位折弯处的位置,生产效率低,生产员在操作时危险性也比较大。
4.2、上述折弯机在折弯开始后上模向下运动,工件在压力的作用下开始发生变形,左、右摆杆同时向里运动,左、右滑块分别向两侧外运动,左、右摆杆在扭簧的作用下紧贴于工件的折弯面(底面),通过左右扭簧形变的带动下,来驱动左右位移传感器移动,从而实现测量角度的目的,左右扭簧的形变大小和形变力度决定测量角度的精度,现实中扭簧的形变大小和力度很容易老化,易造成角度的测量不是很准确。
技术实现要素:
5.本发明要解决的技术问题是针对以上不足,提供一种折弯装置及控制系统,本折弯装置及控制系统能实现无需人工上下料板材和板材折弯处尺寸定位,控制系统可根据实
时拍摄折弯的角度,控制折弯装置调整上膜下压的位移和下模的折弯角度,省去了频繁更换下模的麻烦,提高了折弯的生产效率和生产的安全性。
6.为解决以上技术问题,本发明采用以下技术方案:该折弯装置包括折弯机构,用于将定位机构定位好的板材进行按照一定角度的折弯;所述折弯机构包括折弯台,折弯台由两块对称拼接的1#折弯平板和2#折弯平板构成,折弯台用于存放需要折弯的板材,1#折弯平板下方连接有3#螺纹轨道和1#倾角传感器,3#螺纹轨道由3#螺纹轨道伺服电机驱动,1#折弯平板下方还连接有1#折弯转轴,1#折弯平板在3#螺纹轨道伺服电机的带动下,可以沿着1#折弯转轴做上下运动,1#倾角传感器用来测量1#折弯平板倾斜的角度;所述2#折弯平板下方连接有4#螺纹轨道和2#倾角传感器,4#螺纹轨道由4#螺纹轨道伺服电机驱动,2#折弯平板的下方还连接有2#折弯转轴,2#折弯平板在4#螺纹轨道伺服电机的带动下,可以沿着2#折弯转轴做上下运动,2#倾角传感器用来测量2#折弯平板倾斜的角度,折弯台连接有滑板一端,滑板倾斜放置,滑板另一端连接周转箱,周转箱用于暂存折弯完毕的板材;工作时,1#折弯平板可沿1#折弯转轴自由向上旋转,1#倾角传感器会自动测量出旋转角度为a,2#折弯平板可沿2#折弯转轴自由向上旋转,2#倾角传感器会自动测量出旋转角度为b,则控制系统会自动计算出两块平板形成的下模折弯角度为c=180
°‑
(a+b)
°
。
7.进一步,该折弯装置还包括运送机构,用于将存放于挡板内的金属板材输送到定位机构,并将折弯完毕的板材转移到加工的周转箱内;所述运送机构包括链条输送带,链条输送带的表面固定有带料板,链条输送带通过带料板来获取待折弯的板材,链条输送带一端两侧设有挡板,挡板内用于存放待折弯的板材,挡板底部一侧设有1#光电检测开关,1#光电检测开关用于检测挡板内存放板材的有无,挡板底端两侧设有弹簧,弹簧用于板材在挡板内下落时,起到一个缓冲承接的作用,链条输送带的另一端连接有滚轮输送带。
8.进一步,该折弯装置的滚轮输送带由两列平行的滚轮构成,中间存有一定间隙,滚轮输送带由滚轮输送带电机驱动,用于运送待折弯的板材到折弯机构处,滚轮输送带末端的上方设有2#光电检测开关,2#光电检测开关用于检测运送的板材是否离开滚轮输送带的末端;当1#光电检测开关检测到挡板内有待加工的板材,链条输送带旋转一周,滚轮输送带也同时启动,通过带料板的驱动将挡板底部的一块板材运送带滚轮输送带上,通过滚轮输送带的输送,板材被运输到定位机构处,挡板内的板材也随即下落一块,当2#光电检测开关检测到链条输送带末端待检测的板材经过此处后,滚轮输送带停止运转。
9.进一步,该折弯装置还包括定位机构,用于将运送机构运送来的板材进行前后左右的尺寸定位,使板材的折弯尺寸符合设计的需要;所述定位机构包括前挡板,前挡板位于滚轮输送带的末端下方,前挡板由前挡板旋转步进电机驱动,用于将位于滚轮输送带末端的板材完全推入折弯机构折弯台的表面,折弯台的两侧分别设有1#侧挡板和2#侧挡板,1#侧挡板连接有1#螺纹轨道,1#螺纹轨道由1#螺纹轨道步进电机驱动,可以实现1#侧挡板从折弯台一侧边缘向折弯台中心移动,2#侧
挡板连接有2#螺纹轨道,2#螺纹轨道由2#螺纹轨道步进电机驱动,可以实现2#侧挡板从折弯台另一侧边缘向折弯台中心移动,1#侧挡板和2#侧挡板用于固定折弯板材在折弯台上两侧的位置。
10.进一步,该折弯装置的折弯台的中心上方垂直设有折弯上模,折弯上模上方连接有上模液压缸,上模液压缸上设有1#限位检测开关和2#限位检测开关,1#限位检测开关用于检测上模液压缸缩回的位置检测,2#限位检测开关用于上模液压缸伸出的位置检测,在折弯台的一侧上方还设有视觉相机,视觉相机用于拍摄折弯板材的图片,并将图片传递给控制系统;当运送机构中的2#光电检测开关检测到板材离开滚轮输送带末端,滚轮输送带停止,前挡板旋转90度,将板材完全推入到折弯台表面,然后1#侧挡板和2#侧挡板向折弯台中心移动,当移动到设定距离后,1#侧挡板和2#侧挡板停止,此时,板材的折弯中心正好位于上模的正下方,上模然后下压固定住板材,前挡板、1#侧挡板和2#侧挡板恢复到起始位置,即完成板材尺寸的定位。
11.进一步,该折弯装置的控制系统包括电气机构,电气机构包括plc控制器,plc控制器通过通迅连接触摸屏和视觉相机,plc控制器还连接输入模块和输出模块,输入模块用于检测装置运行状态,并反馈给plc控制器,plc控制器通过输出模块来驱动装置的运行,触摸屏用于显示装置运行的各项参数和状态,所述输入模块包括运送机构输入部分、定位机构输入部分和折弯机构输入部分,输出模块包括运送机构输出部分、定位机构输出部分和折弯机构输出部分,装置的控制系统通过输入和输出模块实现装置的自动运行。
12.进一步,所述运送机构输入部分用于检测待折弯板材的有无和待折弯板材输送位置的检测,所述运送机构输出部分用于将待折弯的板材运输到定位机构处;所述定位机构输入部分用于检测待折弯板材的在折弯平台的位置、上模液压缸伸出与缩回的位置和折弯后效果检测,所述定位机构输出部分用于将待折弯的板材在折弯平台上实现精准的定位;所述折弯机构输入部分用于检测1#折弯平板和2#折弯平板倾斜角度,所述定位机构输出部分用于驱动1#折弯平板和2#折弯平板倾斜一定的角度,从而形成任意角度的下模。
13.进一步,该折弯装置的控制系统还包括电气机构的实现方法,所述电气机构的实现方法包括运送机构流程;运送机构流程起始于步骤s100,流程开始,执行步骤s101;步骤s101,控制系统判断1#光电检测开关处是否有待加工板材;若有执行步骤s103;若没有执行步骤s101;步骤s102,控制系统等待待加工板材到来;完成后执行步骤s101;步骤s103,链条输送带旋转一周后停止,滚轮输送带启动;完成后执行步骤s104;步骤s104,控制系统判断2#光电检测开关处是否有板材;若有执行步骤s105;若没有执行步骤s106;步骤s105,滚轮输送带继续运行;完成后执行步骤s104;步骤s106,滚轮输送带停止,程序进入定位机构流程。
14.进一步,所述电气机构的实现方法还包括定位机构流程,定位机构流程起始于步
骤s200,流程开始,执行步骤s201;步骤s201,前挡板旋转步进电机旋转90度后停止;完成后执行步骤s202;步骤s202,1#侧挡板前进设定距离,2#侧挡板前进设定距离;完成后执行步骤s203;步骤s203,上模液压缸伸出;完成后执行步骤s204;步骤s204,控制系统判断上模液压缸是否伸出到位;若是执行步骤s205和步骤s206;若不是执行步骤s203;步骤s205,前挡板旋转电机恢复到起始位置;步骤s206,1#侧挡板和2#侧挡板恢复到起始位置;完成后执行步骤s207;步骤s207,程序进入到折弯机构流程。
15.进一步,所述电气机构的实现方法还包括折弯机构流程,折弯机构流程起始于步骤s300,流程开始,执行步骤s301;步骤s301,1#折弯平板和2#折弯平板启动向上旋转;完成后执行步骤s302;步骤s302,控制系统判断1#折弯平板和2#折弯平板是否旋转到位;若是执行步骤s303;若不是执行步骤s301;步骤s303,1#折弯平板和2#折弯平板停止旋转;完成后执行步骤s304;步骤s304,视觉相机拍照,并将处理数据传递给控制系统;完成后执行步骤s305和步骤s306;步骤s305,控制系统判断板材折弯是否合格;若合格执行步骤s307和步骤s308;若不合格执行步骤s306;步骤s306,上模液压缸下压一定距离;完成后执行步骤s304;步骤s307,上模液压缸上升复位;步骤s308,1#折弯平板和2#折弯平板反向旋转复位;完成后执行步骤s309;步骤s309,控制系统判断上模液压缸、1#折弯平台和2#折弯平台是否复位到位;若是执行步骤s310;若不是执行步骤s307和步骤s308;步骤s310,程序返回到运送机构流程。
16.本发明采用以上技术方案,与现有技术相比,具有如下技术效果:1、本发明折弯装置设有板材的运送机构、定位机构和折弯机构,运送机构中设有用于板材存放和固定的挡板,挡板中叠加的板材通过链条输送带和滚轮输送带的输送,依次被自动搬运到定位机构,控制系统会根据设定的折弯处的尺寸,通过定位机构中两侧的挡板和驱动挡板运动的步进电机,将板材折弯位置准确定位到上模的正下方,当板材折弯完毕后,下一个待折弯的板材会自动将前一个折弯完毕的板材顶出,无需人工费时费力的上下板材,从而提高了生产效率,保障了生产员的人身安全。
17.2、本发明设有折弯机构,折弯机构的工作台由两块刚性平板组成,两块刚性平板的下方均设有用于测量角度的倾角传感器和用于平板旋转的步进电机,控制系统会根据设定的折弯角度,通过倾角传感器反馈来的角度信号控制步进电机的启停,使两块平板行成任意角度的下模,通过配合上模的下压使板材折叠成一定角度的成品,解决了因不同折角来频繁更换下模模口的麻烦,同时也避免了因机械装置形变尺寸不一致,而使角度测量不准确的问题,提高了生产效率和更换下模装置的成本。
18.3、在本发明折弯机构工作台的一侧设有视觉相机,视觉相机可拍摄板材折弯过程中的图像,并将板材折弯角度图像传送给控制系统,控制系统会根据视觉相机拍摄的图像,来控制下模下降的高度和压力,可以确保每一块板材折弯角度都符合设定的要求,解决了一些折弯设备需要调节下模的下压力度和高度的问题,从而提高了板材折弯的效果。
附图说明
19.为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍。在所有附图中,类似的元件或部分一般由类似的附图标记标识。附图中,各元件或部分并不一定按照实际的比例与方位绘制。
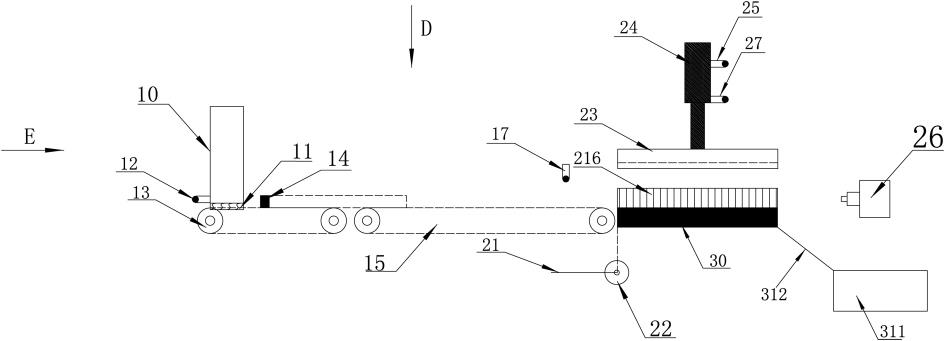
20.图1为本发明中装置的结构示意图;图2为本发明中e方向链条输送带和挡板的连接结构示意图;图3为本发明中滚轮输送带d方向结构示意图;图4为本发明中e方向折弯机构和定位机构结构示意图;图5为本发明中板材折弯角度示意图;图6为本发明装置的控制系统的电气连接原理图;图7为本发明中控制系统的运送机构流程图;图8为本发明中控制系统的定位机构流程图;图9为本发明中控制系统的折弯机构流程图。
具体实施方式
21.折弯装置,包括运送机构、定位机构和折弯机构。
22.如图1至图3所示,所述运送机构,用于将存放于挡板内的金属板材输送到定位机构,并将折弯完毕的板材转移到加工的周转箱内;所述定位机构,用于将运送机构运送来的板材进行前后左右的尺寸定位,使板材的折弯尺寸符合设计的需要;所述折弯机构,用于将定位机构定位好的板材进行按照一定角度的折弯。
23.所述运送机构包括链条输送带13,链条输送带13由链条输送带步进电机驱动,链条输送带13的表面固定有带料板14,链条输送带13通过带料板14来获取待折弯的板材,链条输送带13一端两侧设有挡板10,挡板10内用于存放待折弯的板材,挡板10底部一侧设有1#光电检测开关12,1#光电检测开关12用于检测挡板10内存放板材的有无,挡板10底端两侧设有弹簧11,弹簧11用于板材在挡板10内下落时,起到一个缓冲承接的作用,链条输送带13的另一端连接有滚轮输送带15,滚轮输送带15由两列平行的滚轮构成,中间存有一定间隙,滚轮输送带15由滚轮输送带电机驱动,用于运送待折弯的板材到定位机构处,滚轮输送带15末端的上方设有2#光电检测开关17,2#光电检测开关17用于检测运送的板材是否离开滚轮输送带15的末端。
24.装置开机时,1#光电检测开关检测到挡板内有待加工的板材,链条输送带旋转一周,滚轮输送带也同时启动,通过带料板的驱动将挡板底部的一块板材运送带滚轮输送带上,通过滚轮输送带的输送,板材被运输到定位机构处,挡板内的板材也随即下落一块,当
2#光电检测开关检测到链条输送带末端待检测的板材经过此处后,滚轮输送带停止运转。
25.如图1和图4所示,所述折弯机构包括折弯台30,折弯台30由两块对称拼接的1#折弯平板31和2#折弯平板32构成,折弯台30用于存放需要折弯的板材,1#折弯平板31和2#折弯平板32可以旋转,从而能够形成任意折弯角度的下模,1#折弯平板31下方连接有3#螺纹轨道39和1#倾角传感器35,3#螺纹轨道39由3#螺纹轨道步进电机37驱动,1#折弯平板31下方还连接有1#折弯转轴33,1#折弯平板31在3#螺纹轨道步进电机37的带动下,可以沿着1#折弯转轴33做上下运动,1#倾角传感器35用来测量1#折弯平板31倾斜的角度。
26.所述2#折弯平板32下方连接有4#螺纹轨道310和2#倾角传感器36,4#螺纹轨道310由4#螺纹轨道步进电机38驱动,2#折弯平板32的下方还连接有2#折弯转轴34,2#折弯平板32在4#螺纹轨道步进电机38的带动下,可以沿着2#折弯转轴34做上下运动,2#倾角传感器36用来测量2#折弯平板32倾斜的角度,折弯台30连接有滑板312一端,滑板312倾斜放置,滑板312另一端连接周转箱311,周转箱311用于暂存折弯完毕的板材。
27.所述定位机构包括前挡板21,前挡板21位于滚轮输送带15的末端下方,前挡板21由前挡板旋转步进电机22驱动,用于将位于滚轮输送带15末端的板材完全推入折弯机构折弯台30的表面,折弯台30的两侧分别设有1#侧挡板210和2#侧挡板211,1#侧挡板210连接有1#螺纹轨道212,1#螺纹轨道212由1#螺纹轨道步进电机213驱动,可以实现1#侧挡板210从折弯台30一侧边缘向折弯台30中心移动,2#侧挡板211连接有2#螺纹轨道214,2#螺纹轨道214由2#螺纹轨道步进电机215驱动,可以实现2#侧挡板211从折弯台30另一侧边缘向折弯台30中心移动,1#侧挡板210和2#侧挡板211用于固定折弯板材在折弯台30上两侧的位置,折弯台30的中心上方垂直设有折弯上模23,折弯上模23上方连接有上模液压缸24,上模液压缸24上设有1#限位检测开关25和2#限位检测开关27,1#限位检测开关25用于检测上模液压缸24缩回的位置检测,2#限位检测开关27用于上模液压缸24伸出的位置检测,在折弯台30的一侧上方还设有视觉相机26,视觉相机26用于拍摄折弯板材的图片,并将图片传递给控制系统。
28.综上所述,当运送机构中的2#光电检测开关检测到板材离开滚轮输送带末端,滚轮输送带停止,前挡板旋转步进电机旋转90度,将板材完全推入到折弯台上表面,然后1#侧挡板在1#螺纹轨道步进电机的驱动下向折弯台中心移动,2#侧挡板在2#螺纹轨道步进电机的驱动下向折弯台中心移动,当移动到设定距离后,1#侧挡板和2#侧挡板停止,此时,板材的折弯中心正好位于折弯上模的正下方,折弯上模经上模液压缸的驱动下压,控制系统检测到折弯上模下压到位后,前挡板、1#侧挡板和2#侧挡板恢复到起始位置。
29.如图5所示,1#折弯平板向上旋转一定的角度a,2#折弯平板向上旋转一定的角度b,控制系统会自动计算出两块平板形成的下模折弯角度为c=180
°‑
(a+b)
°
,当计算后的角度为设定的折弯角度时,1#折弯平板和2#折弯平板停止旋转,此时,视觉相机会拍摄折弯的角度照片,并将处理的数据传给控制系统,控制系统会计算判断折弯角度是否合格,若合格,1#折弯平板和2#折弯平板复原,上模也抬升复原,若不合格,控制系统会启动上模液压缸下压,直至折弯角度合格,然后链条输送带旋转一周,会自动运送来下一个待折弯板材,合格的折弯板材,经待折弯板顶落到折弯台下方的周转箱内。
30.如图6所示,本发明折弯装置的控制系统,包括电气机构和电气机构实现方法,电气机构包括plc控制器,plc控制器通过通迅连接触摸屏和视觉相机,plc控制器还连接有输
入模块和输出模块,输入模块用于检测装置运行状态,并反馈给plc控制器,plc控制器通过输出模块来驱动装置的运行,触摸屏用于显示装置运行的各项参数和状态,所述输入模块包括运送机构输入部分、定位机构输入部分和折弯机构输入部分,输出模块包括运送机构输出部分、定位机构输出部分和折弯机构输出部分,装置的控制系统通过输入和输出模块实现装置的自动运行。
31.所述运送机构输入部分包括1#光电检测开关、2#光电检测开关,运送机构的输出部分包括链条输送带和滚轮输送带,plc控制器通过1#光电检测开关和2#光电检测开关反馈的信号,控制链条输送带和滚轮输送带运转,实现运送机构的自动运行。
32.所述折弯机构输入部分包括1#倾角传感器和2#倾角传感器,折弯机构输出部分包括3#螺纹轨道步进电机、4#螺纹轨道步进电机,plc控制器通过1#倾角传感器和2#倾角传感器反馈的信号,控制3#螺纹轨道步进电机、4#螺纹轨道步进电机运转,实现折弯机构的自动运行。
33.所述定位机构输入部分包括1#限位检测开关、2#限位检测开关和视觉相机,定位机构输出部分包括前挡板旋转步进电机、上模液压缸、1#螺纹轨道步进电机、2#螺纹轨道步进电机,plc控制器通过1#限位检测开关、2#限位检测开关和视觉相机反馈的信号,控制前挡板旋转步进电机、上模液压缸、1#螺纹轨道步进电机、2#螺纹轨道步进电机动作,实现定位机构的自动运行。
34.所述电气机构的实现方法,包括运送机构流程、定位机构流程和折弯机构流程,现将电气机构的实现流程步骤做如下说明。
35.如图7所示,运送机构流程起始于步骤s100,流程开始,执行步骤s101;步骤s101,控制系统判断1#光电检测开关处是否有待加工板材;若有执行步骤s103;若没有执行步骤s101;步骤s102,控制系统等待待加工板材到来;完成后执行步骤s101;步骤s103,链条输送带旋转一周后停止,滚轮输送带启动;完成后执行步骤s104;步骤s104,控制系统判断2#光电检测开关处是否有板材;若有执行步骤s105;若没有执行步骤s106;步骤s105,滚轮输送带继续运行;完成后执行步骤s104;步骤s106,滚轮输送带停止,程序进入定位机构流程。
36.如图8所示,定位机构流程起始于步骤s200,流程开始,执行步骤s201;步骤s201,前挡板旋转步进电机旋转90度后停止;完成后执行步骤s202;步骤s202,1#侧挡板前进设定距离,2#侧挡板前进设定距离;完成后执行步骤s203;步骤s203,上模液压缸伸出;完成后执行步骤s204;步骤s204,控制系统判断上模液压缸是否伸出到位;若是执行步骤s205和步骤s206;若不是执行步骤s203;步骤s205,前挡板旋转电机恢复到起始位置;步骤s206,1#侧挡板和2#侧挡板恢复到起始位置;完成后执行步骤s207;步骤s207,程序进入到折弯机构流程。
37.如图9所示,折弯机构流程起始于步骤s300,流程开始,执行步骤s301;
步骤s301,1#折弯平板和2#折弯平板启动向上旋转;完成后执行步骤s302;步骤s302,控制系统判断1#折弯平板和2#折弯平板是否旋转到位;若是执行步骤s303;若不是执行步骤s301;步骤s303,1#折弯平板和2#折弯平板停止旋转;完成后执行步骤s304;步骤s304,视觉相机拍照,并将处理数据传递给控制系统;完成后执行步骤s305和步骤s306;步骤s305,控制系统判断板材折弯是否合格;若合格执行步骤s307和步骤s308;若不合格执行步骤s306;步骤s306,上模液压缸下压一定距离;完成后执行步骤s304;步骤s307,上模液压缸上升复位;步骤s308,1#折弯平板和2#折弯平板反向旋转复位;完成后执行步骤s309;步骤s309,控制系统判断上模液压缸、1#折弯平台和2#折弯平台是否复位到位;若是执行步骤s310;若不是执行步骤s307和步骤s308;步骤s310,程序返回到运送机构流程。
38.本发明的描述是为了示例与描述起见而给出的,而并不是无遗漏的或者将本发明限于所公开的形式。很多修改与变化对于本领域的普通技术人员而言是显然的。选择与描述实施例是为了更好的说明本发明的原理与实际应用,并且使本领域的普通技术人员能够理解本发明从而设计适于特定用途的带有各种修改的各种实施例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1