无极柔性焊网生产线的制作方法
1.本实用新型涉及金属加工技术领域,具体涉及一种无极柔性焊网生产线。
背景技术:
2.柔性焊网主要用于建筑网片、足球场、铁路、高速公路、桥梁、建筑、住宅小区以及货架、仓储笼等,钢筋焊网作业中,纵筋是其实现焊接的工件原料之一,在焊接时需要将纵筋分筋排布成互相平行且间距相等的纵筋组,再在焊机部分将横筋焊接到纵筋上,从而焊接成钢筋网片,现有的焊网生产线只能排布固定间距的纵筋和横筋,设备适用范围窄,很难满足生产不同密度的焊网。
3.为此,我公司分别研发了纵筋间距可调的纵筋供应系统和横筋间距可调的横筋供应系统,其中纵筋供应系统包括自动配筋机、集线架、纵筋放置车和纵筋牵引车(具体结构可参照专利申请文件202011544948.5),横筋供应系统包括自动配筋机、集线架、横筋横接机、横筋运输车和横筋递送机,通过调整横筋递送机的运行速度和间歇时间,实现对柔性焊网横筋密度的调整(具体结构可参照专利申请文件202121702566.0),最终纵筋供应系统和横筋供应系统供应的横筋和纵筋在自动焊机上进行焊接,自动焊机的上焊级块之间的间距可根据纵筋之间的距离进行调整(具体结构可参照专利申请文件202011544948.5)实现了柔性焊网的密度调整。
4.柔性焊网焊接完成后还需要对横筋进行整形折弯,如何将柔性焊网顺利牵引到弯网机处,且使弯网机能够应对不同密度的焊网,成为亟待解决的问题。
技术实现要素:
5.本实用新型的目的是为了解决上述问题,设计一种全自动柔性焊网生产线。具体设计方案为:
6.一种无极柔性焊网生产线,包括纵筋供应系统、横筋供应系统、自动焊机、牵引系统和弯网系统,纵筋供应系统和横筋供应系统位于自动焊机的右侧,牵引系统位于自动焊机左侧用于将焊接好的网片供应给弯网系统实现折弯,所述弯网系统包括垂直于纵筋设置的导轨、安装在导轨上的两台弯网机和托举机构,两台弯网机之间的距离可调。
7.具体的,所述牵引系统包括上拉网滑道和下拉网滑道,下拉网滑道位于上拉网滑道下方靠近自动焊机的一侧,所述上拉网滑道上安装有上拉网车和上推网车,其中上推网车靠近弯网系统,所述下拉网滑道上安装有下拉网车,上拉网车、上推网车和下拉网车均通过牵引机构实现在上拉网滑道、下拉网滑道上滑动。
8.具体的,所述上拉网车包括旋转轴,旋转轴与位于前后侧的牵引主连接板转动连接,旋转轴的旋转通过夹紧气缸实现,旋转轴右侧安装有固定臂和转动臂,所述固定臂与旋转轴固定连接,所述转动臂的前端穿过固定臂上的条形通孔并与固定臂转动连接以夹持横筋,转动臂的旋转通过上拉网气缸实现。
9.具体的,上推网车的固定臂朝向弯网系统,且上推网车的固定臂长度长于上拉网
车的固定臂长度。
10.具体的,所述下拉网车包括平行设置的拉网主梁、拉网固定梁和拉网滑动梁,拉网滑动梁底部设置有垂直于横筋的轨道连接臂,拉网固定梁通过滑块实现沿轨道连接臂的滑轨滑动,所述拉网滑动梁由固定在拉网固定梁上的滑动气缸驱动,所述拉网固定梁的右侧安装有多个阵列分布的固定拉网钩,拉网滑动梁的右端安装有与固定拉网钩数量相同的滑动拉网钩,所述拉网固定梁通过翻转轴与拉网主梁转动连接,拉网主梁的左侧铰接有翻转气缸、所述翻转气缸的缸轴与拉网固定梁通过长沟架铰接。
11.具体的,所述弯网机底部安装有底座,底座的底部安装有在导轨上滑动的滑块,弯网机的移动通过驱动机构实现,所述驱动机构包括安装在机架上与导轨平行的齿条,齿条的齿位于齿条上表面,底座上安装有与齿条啮合的齿轮,所述齿轮包括安装在底面开口的行走齿轮箱内的驱动齿轮和从动齿轮,驱动齿轮套设在伺服电机的输出轴上,从动齿轮位于驱动齿轮下方并与驱动齿轮和齿条啮合。
12.具体的,底座底部设置有不少于两组的限位机构,所述限位机构包括夹紧气缸和夹紧气缸两端铰接的夹紧臂,所述夹紧臂远离夹紧气缸的一端设置有夹紧块,夹紧块分别位于安装有齿条的机架前后两侧,夹紧块面向机架的一面设置有多条平行设置的夹紧齿槽,所述夹紧臂通过销轴实现与底座内设置的气缸立板之间的转动连接。
13.具体的,所述托举机构包括垂直于网片移动方向设置的多组支撑架和在支撑架上阵列分布的托举方管,托举方管的长度方向与支撑架垂直。
14.通过本实用新型的上述技术方案得到的全自动柔性焊网生产线,其有益效果是:
15.1、实现了不同密度的柔性焊网的全自动化焊接和折弯,提高了生产线的适用性。
16.2、通过下拉网车、上拉网车、上推网车的交替推拉,实现网片由自动焊机到折弯系统的牵引,加工效率高。
附图说明
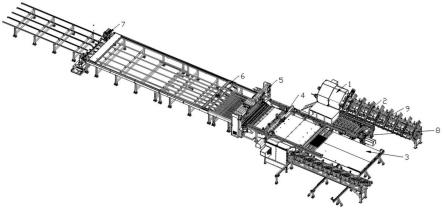
17.图1是本实用新型所述无极柔性焊网生产线的结构示意图;
18.图2是本实用新型所述下拉网车的结构示意图;
19.图3是本实用新型所述上拉网车的部分结构示意图;
20.图4是本实用新型所述上推网车的部分结构示意图;
21.图5是本实用新型所述弯网系统的结构示意图;
22.图6是本实用新型所述弯网系统另一个角度的结构示意图;
23.图7是本实用新型所述限位机构的结构示意图;
24.图中,1、自动配筋机;2、集线架;3、纵筋放置车;4、纵筋牵引车;5、自动焊机;6、牵引系统;6a、上拉网滑道;6b、下拉网滑道;6c、上拉网车; 6c1、固定臂;6c2、转动臂;6c3、上拉网气缸;6c4、旋转轴;6c5、夹紧气缸; 6d、下拉网车;6d1、拉网固定梁;6d2、滑动拉网钩;6d3、轨道连接臂;6d4、拉网主梁;6d5、翻转气缸;6d6、固定拉网钩;6d7、滑动气缸;6d8、拉网滑动梁;6d9、翻转轴承;6e、牵引机构;6e1、驱动轴;6e2、牵引电机;6e3、传动齿轮组;6e4、牵引主连接板;6f、上推网车;7、弯网系统;7a、弯网机; 7b、导轨;7c、托举机构;7d、驱动机构;7d1、齿条;7d2、齿轮;7f、限位机构;7f1、夹紧气缸;7f2、夹紧块;7f3、夹紧臂;7f4、限位板;7f5、垫板; 7f6、锁紧隔套;7f7、气缸立板;7f8、销轴;8、横筋运输车;9、横筋承接机。
具体实施方式
25.下面结合附图对本实用新型进行具体描述,描述中关于空间定位的术语以图1为参照。
26.如图所示,一种无极柔性焊网生产线,包括纵筋供应系统、横筋供应系统、自动焊机5、牵引系统6和弯网系统7,纵筋供应系统和横筋供应系统位于自动焊机5的右侧,牵引系统6位于自动焊机5左侧用于将焊接好的网片供应给弯网系统7实现折弯,所述弯网系统7包括垂直于纵筋设置的导轨7b、安装在导轨7b上的两台弯网机7a和托举机构7c,两台弯网机7a之间的距离可调。
27.纵筋供应系统、横筋供应系统和自动焊机5均采用背景文件中所述的结构,其中纵筋供应系统包括自动配筋机1、集线架2、纵筋放置车3、纵筋牵引车4,横筋供应系统包括自动配筋机1、集线架2、横筋承接机9、横筋运输车8和横筋递送机,纵筋供应系统和横筋供应系统的自动配筋机1和集线架2分别位于纵筋牵引车4前、后两侧,纵筋牵引车4通过纵筋放置车3与集线架2连接,横筋运输车8通过横筋承接机9与集线架2连接、通过横筋递送机与自动焊机5 连接,横筋运输车8用于将从集线架2落下的钢筋方向旋转至与纵筋方向垂直以作为横筋使用,横筋运输车8的运行轨道一端位于横筋承接机9下方,另一端位于横筋递送机下方。
28.所述牵引系统6包括上拉网滑道6a和下拉网滑道6b,下拉网滑道6b位于上拉网滑道6a下方靠近自动焊机5的一侧,所述上拉网滑道6a上安装有上拉网车6c和上推网车6f,其中上推网车6f靠近弯网系统7,所述下拉网滑道6b 上安装有下拉网车6d,上拉网车6c、上推网车6f和下拉网车6d均通过牵引机构6e实现在上拉网滑道6a、下拉网滑道6b上滑动。
29.如图所示,所述上拉网车6c包括旋转轴6c4,旋转轴6c4与位于前后侧的牵引主连接板6e4转动连接,旋转轴6c4的旋转通过旋转气缸6c5实现,旋转轴6c4右侧安装有固定臂6c1和转动臂6c2,所述固定臂6c1与旋转轴6c4固定连接,所述转动臂6c2的前端穿过固定臂6c1上的条形通孔并与固定臂6c1 转动连接以夹持横筋,转动臂6c2的旋转通过上拉网气缸6c3实现。
30.具体的,所述上拉网气缸6c3的缸体与所述固定臂6c1转动连接,所述上拉网气缸6c3的缸轴与所述转动臂6c2一端铰接;所述旋转气缸6c5的缸体与所述牵引主连接板铰接,所述旋转气缸6c5的缸轴与所述旋转轴6c4通过摇杆铰接。
31.如图所示,所述上推网车6f的结构与上拉网车6c的结构基本相同,不同的是,上推网车6f的固定臂6c1朝向弯网系统7,且上推网车6f的固定臂6c1 长度长于上拉网车6c的固定臂6c1长度。
32.如图所示,所述下拉网车6d包括平行设置的拉网主梁6d4、拉网固定梁6d1 和拉网滑动梁6d8,拉网滑动梁6d8底部设置有垂直于横筋的轨道连接臂6d3,拉网固定梁6d1通过滑块实现沿轨道连接臂6d3的滑轨滑动,所述拉网滑动梁 6d8由固定在拉网固定梁6d1上的滑动气缸6d7驱动,所述拉网固定梁6d1的右侧安装有多个阵列分布的固定拉网钩6d6,拉网滑动梁6d8的右端安装有与固定拉网钩6d6数量相同的滑动拉网钩6d2,所述拉网固定梁6d1通过翻转轴与拉网主梁6d4转动连接,拉网主梁6d4的左侧铰接有翻转气缸6d5、所述翻转气缸 6d5的缸轴与拉网固定梁6d1通过长沟架铰接。
33.所述牵引机构6e包括固定在牵引主连接板6e4上的驱动轴6e1,所述驱动轴6e1通
过牵引电机6e2驱动旋转,所述牵引电机6e2通过传动齿轮7d2组6e3 与所述驱动轴6e1连接,所述驱动轴6e1上还套设有固定轴承,固定轴承与牵引主连接板6e4连接,驱动轴6e1穿过牵引主连接板6e4均设有齿轮7d2并与所述上拉网滑道6a、下拉网滑道6b上的齿条7d1啮合连接,牵引主连接板6e4 上设有滑块与所述上拉网滑道6a、下拉网滑道6b的侧端滑动连接。
34.所述导轨7b包括安装在机架上的相互平行的两条,弯网机7a在驱动机构 7d的作用下实现在导轨7b上的滑动。
35.具体的,所述弯网机7a底部安装有底座,底座的底部安装有在导轨7b上滑动的滑块,所述驱动机构7d包括安装在机架上与导轨7b平行的齿条7d1,齿条7d1的齿位于齿条7d1上表面,底座上安装有与齿条7d1啮合的齿轮7d2,所述齿轮7d2包括安装在底面开口的行走齿轮7d2箱内的驱动齿轮7d2和从动齿轮7d2,驱动齿轮7d2套设在伺服电机的输出轴上,从动齿轮7d2位于驱动齿轮 7d2下方并与驱动齿轮7d2和齿条7d1啮合。
36.为在钢筋折弯时将弯网机7a固定在导轨7b上,每台弯网机7a底部设置有不少于两组的限位机构7f,所述限位机构7f包括夹紧气缸7f1和夹紧气缸7f1 两端铰接的夹紧臂7f3,所述夹紧臂7f3远离夹紧气缸7f1的一端设置有夹紧块 7f2,夹紧块7f2分别位于安装有齿条7d1的机架前后两侧,夹紧块7f2面向机架的一面设置有多条平行设置的夹紧齿槽,夹紧气缸7f1伸长时,夹紧块7f2 夹紧机架,实现对弯网机7a的固定。
37.所述夹紧臂7f3通过销轴7f8实现与底座内设置的气缸立板7f7之间的转动连接,销轴7f8的两端分别穿过气缸立板7f7和底座侧壁,夹紧臂7f3供销轴7f8穿过的通孔内固定有锁紧隔套7f6,夹紧臂7f3的两端分别与夹紧气缸 7f1和夹紧块7f2铰接。
38.气缸立板7f7上还设置有位于两个夹紧臂7f3外侧的限位板7f4,所述限位板7f4与销轴7f8平行设置,限位板7f4的两端分别固定有面向夹紧臂7f3的楔形限垫板7f5,所述限垫板7f5在夹紧气缸7f1收缩时能够与锁紧隔套7f6抵接,限制气缸的收缩行程。
39.弯网机7a为现有技术,在这里不再作进一步说明,具体结构可参照专利文件202023146526.0。
40.所述托举机构7c包括垂直于网片移动方向设置的多组支撑架和在支撑架上阵列分布的托举方管,托举方管的长度方向与支撑架垂直,用于托举折弯后的网片。
41.钢筋卷材经横筋供应系统和纵筋供应系统配筋、间距调整、配送后在自动焊机5上进行焊接得到网片,下拉网车6d、上拉网车6c、上推网车6f通过对横筋的夹取、移动等操作,拉动网片向后移动以对其进行折弯操作,同时不影响后续焊接工作的继续进行,两个焊网机之间的距离根据网片的纵筋密度进行调整。
42.所述上拉网车6c的夹取通过上拉网气缸6c3驱动,所述固定臂6c1、转动臂6c2均呈“l”形结构,在转动时其末端可以实现夹取;当上拉网车6c完成拉取作业后,夹紧气缸7f1驱动旋转轴6c4翻转直至固定臂6c1和转动臂6c2 均高于网片的高度,避免影响网片的继续传递。
43.类似的,上推网车6f的夹取与上拉网车6c的夹取方式相同,不同的是,上推网车推动网片远离弯网机的一端,上拉网车拉动网片靠近弯网机的一端。
44.所述下拉网车6d的固定拉网钩6d6、滑动拉网钩6d2呈“l”形结构,与上拉网车6c的转动夹取机理不同,所述下拉网车6d采用滑动夹取机理,所述滑动气缸6d7驱动拉网滑动梁
6d8相对于拉网固定梁6d1沿左右方向移动,从而使分别与拉网固定梁6d1连接的固定拉网钩6d6、与拉网滑动梁6d8连接的滑动拉网钩6d2发生位置变动实现夹取,所述翻转气缸6d5驱动整体拉网固定梁6d1 及其连接的其余组件均以所述翻转轴为轴心转动;当自动焊机5作业时,下拉网的固定拉网钩6d6和滑动拉网钩6d2穿过拉网槽向下翻转直至钩部低于自动焊机5的下焊极块高度,避免影响横筋的输送。
45.所述上拉网车6c、上推网车6f下拉网车6d沿左右方向的移动,通过牵引电机6e2驱动,驱动轴6e1传动,通过上拉网滑道6a、下拉网滑道6b上的齿条7d1、牵引齿轮7d2啮合转动实现。
46.固定拉网钩6d6、滑动拉网钩6d2组成的下拉网组件与上拉网车6c的固定臂6c1、转动臂6c2组成的上拉网组件交错分布,当下拉网组件移动到上拉网组件位置时,固定拉网钩6d6、滑动拉网钩6d2分离,固定臂6c1和转动臂6c2闭合,拉动网片向上推网车6f的方向移动,下拉网车6d回到起始位置,上拉网车6c拉动整个网片脱离自动焊机5的区域后,下拉网车6d拉拽另一个成型的网片向上拉网车6c方向移动,上拉网车6c回到起始位置,上推网车6f运动至网片远离弯网机7a的一侧,然后推动网片向弯网机7a方向移动,对网片的横筋实行折弯操作。
47.上述作业步骤实现了柔性焊网的全自动化,且适用于不同密度的焊网,网片完全成型后向弯网机7a移动过程中,不影响下一个网片的牵引,加工效率高。
48.上述技术方案仅体现了本实用新型技术方案的优选技术方案,本技术领域的技术人员对其中某些部分所可能做出的一些变动均体现了本实用新型的原理,属于本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1