一种用于箱体焊接的填丝焊接装置的制作方法
1.本实用新型属于激光焊接装置领域,具体涉及一种用于箱体焊接的填丝焊接装置。
背景技术:
2.目前对于箱体(如服务器柜)的焊接,通常采用tig焊(tungsten inert gas welding)的方式。这种方式在焊后还需要对箱体进行人工打磨,不仅自动化程度低,劳动强度大,工序繁琐,处理时间长,而且产品形变量大,从而导致生产效率低下,产品质量差。
技术实现要素:
3.针对现有技术存在的缺陷,本实用新型旨在提供一种用于箱体焊接的填丝焊接装置,使得箱体在焊接后无须打磨,提升产品质量,降低劳动强度。
4.为解决上述技术问题,实现上述技术效果,本实用新型通过以下技术方案实现:
5.一种用于箱体焊接的填丝焊接装置,包括激光焊接头、安装立板、安装横板、激光焊接头固定座、送丝管、送丝嘴、送丝管固定支架和送丝管摆动机构;所述安装横板固定在所述安装立板的顶部,所述激光焊接头通过所述激光焊接头固定座安装在所述安装横板的上表面,所述送丝管摆动机构位于所述激光焊接头的一侧,且所述送丝管摆动机构设置在所述安装横板上,所述送丝管通过所述送丝管固定支架设置在所述送丝管摆动机构上,所述送丝管的后端与送丝机连接,所述送丝管的前端设置有所述送丝嘴,所述送丝管摆动机构通过带动所述送丝管摆动实现所述送丝嘴靠近或远离所述激光焊接头,且当所述送丝嘴靠近所述激光焊接头时,所述送丝嘴对准所述激光焊接头的焦点位置。
6.进一步的,所述激光焊接头设置有一个焊缝寻位相机,所述焊缝寻位相机通过焊缝寻位相机固定支架安装在所述安装横板上,且所述焊缝寻位相机对准所述激光焊接头的焦点位置。
7.进一步的,所述送丝管上设置有保护气吹嘴,所述保护气吹嘴的尾端与保护气气源连接,所述保护气吹嘴的前端在所述送丝嘴靠近所述激光焊接头时同样对准所述激光焊接头的焦点位置。
8.进一步的,所述送丝管摆动机构包括摆动气缸和摆杆组件,所述摆动气缸竖直向上的设置在所述安装横板的下表面,所述摆杆组件的一端与所述摆动气缸的转轴连接,所述摆杆组件的另一端与所述送丝管固定支架连接。
9.进一步的,所述摆杆组件由第一摆杆、第二摆杆和送丝管固定支架安装板组成,所述第一摆杆与所述第二摆杆平行地设置在所述安装横板的上表面,其中所述第一摆杆的后端与所述摆动气缸的转轴连接,所述第二摆杆的后端与所述安装横板的上表面铰接,所述第一摆杆的前端和所述第二摆杆的前端分别与所述送丝管固定支架安装板的下表面铰接,所述送丝管固定支架竖立设置在所述送丝管固定支架安装板上。
10.进一步的,所述送丝管固定支架上设置有腰型孔,所述送丝管高度可调地穿设在
所述送丝管固定支架的腰型孔内。
11.进一步的,所述送丝管固定支架安装板的内侧面设置有一块接触块,所述激光焊接头的下方通过对应的连接板设置有一个用于阻挡所述接触块的限位块,所述送丝管和所述送丝嘴通过所述接触块与所述限位块的配合实现摆动限位。
12.进一步的,所述接触块的接触面为凸型三角,所述限位块的接触面为凹型三角。
13.进一步的,所述安装横板与所述安装立板之间连接有加强板。
14.进一步的,还包括一个地轨机器人,所述地轨机器人的机械手与所述安装立板固定连接。
15.与现有技术相比,本实用新型的有益效果为:
16.本实用新型可以对箱体进行精确地激光填丝焊接,由于激光填丝焊接的平整度较高,因此箱体在焊接后无须再进行打磨。在实际生产中,箱体的板材可以在焊接前先进行喷涂工序,并且只需在边缘处留出焊接位置,等全部焊接完之后,再对焊接处进行补喷即可。这不仅可以避免产品因打磨而造成的形变,保证了产品的质量,而且减少了加工工序,提高了焊接效率,减少了劳动强度。
17.上述说明仅是本实用新型技术方案的概述,为了能够更清楚了解本实用新型的技术手段,并可依照说明书的内容予以实施,以下以本实用新型的较佳实施例并配合附图详细说明如后。本实用新型的具体实施方式由以下实施例及其附图详细给出。
附图说明
18.此处所说明的附图用来提供对本实用新型的进一步理解,构成本技术的一部分,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。在附图中:
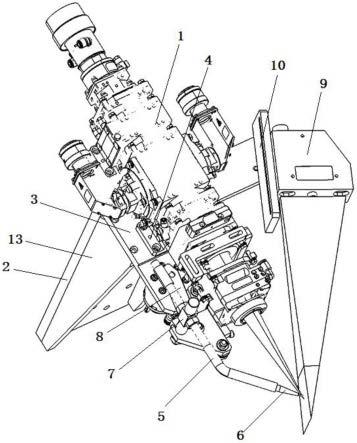
19.图1为本实用新型的前部结构立体图;
20.图2为本实用新型的后部结构立体图;
21.图3为本实用新型的送丝管摆动机构的结构示意图;
22.图4为本实用新型的接触块与限位块的配合关系示意图;
23.图5为本实用新型与地轨机器人的配合关系示意图。
具体实施方式
24.下面将参考附图并结合实施例,来详细说明本实用新型。此处所作说明用来提供对本实用新型的进一步理解,构成本技术的一部分,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。
25.参见图1-2所示,一种用于箱体焊接的填丝焊接装置,包括激光焊接头1、安装立板2、安装横板3、激光焊接头固定座4、送丝管5、送丝嘴6、送丝管固定支架7和送丝管摆动机构8;所述安装横板3固定在所述安装立板2的顶部,所述激光焊接头1通过所述激光焊接头固定座4安装在所述安装横板3的上表面,所述送丝管摆动机构8位于所述激光焊接头1的一侧,且所述送丝管摆动机构8设置在所述安装横板3上,所述送丝管5通过所述送丝管固定支架7设置在所述送丝管摆动机构8上,所述送丝管5的后端与送丝机连接,所述送丝管5的前端设置有所述送丝嘴6,所述送丝管摆动机构8通过带动所述送丝管5摆动实现所述送丝嘴6
靠近或远离所述激光焊接头1,且当所述送丝嘴6靠近所述激光焊接头1时,所述送丝嘴6对准所述激光焊接头1的焦点位置。
26.进一步的,所述激光焊接头1设置有一个焊缝寻位相机9,所述焊缝寻位相机9通过焊缝寻位相机固定支架10安装在所述安装横板3上,且所述焊缝寻位相机9对准所述激光焊接头1的焦点位置。
27.进一步的,所述送丝管5上设置有保护气吹嘴,所述保护气吹嘴的尾端与保护气气源连接,所述保护气吹嘴的前端在所述送丝嘴6靠近所述激光焊接头1时同样对准所述激光焊接头1的焦点位置,从而实现在送丝的同时对焊接位置吹保护气体。
28.进一步的,参见图3所示,所述送丝管摆动机构8包括摆动气缸801和摆杆组件,所述摆动气缸801竖直向上的设置在所述安装横板3的下表面,所述摆杆组件的一端与所述摆动气缸801的转轴连接,所述摆杆组件的另一端与所述送丝管固定支架7连接。
29.进一步的,所述摆杆组件由第一摆杆802、第二摆杆803和送丝管固定支架安装板804组成,所述第一摆杆802与所述第二摆杆803平行地设置在所述安装横板3的上表面,其中所述第一摆杆802的后端与所述摆动气缸801的转轴连接,所述第二摆杆803的后端与所述安装横板3的上表面铰接,所述第一摆杆802的前端和所述第二摆杆803的前端分别与所述送丝管固定支架安装板804的下表面铰接,所述送丝管固定支架7竖立设置在所述送丝管固定支架安装板804上。
30.进一步的,所述送丝管固定支架7上设置有腰型孔,所述送丝管5高度可调地穿设在所述送丝管固定支架7的腰型孔内。
31.进一步的,参见图4所示,所述送丝管固定支架安装板804的内侧面设置有一块接触块11,所述激光焊接头1的下方通过对应的连接板设置有一个用于阻挡所述接触块11的限位块12,所述送丝管5和所述送丝嘴6通过所述接触块11与所述限位块12的配合实现摆动限位,以避免所述送丝嘴6伸入所述激光焊接头1的光束内,造成所述送丝嘴6损坏。
32.进一步的,所述接触块11的接触面为凸型三角,所述限位块12的接触面为凹型三角,从而提高限位的可靠性。
33.进一步的,所述安装横板3与所述安装立板2之间连接有加强板13,以提高所述安装横板3和所述安装立板2的连接强度。
34.进一步的,参见图5所示,还包括一个地轨机器人14,所述地轨机器人14的机械手与所述安装立板2固定连接,从而使得所述激光焊接头1、所述送丝嘴6等组件能够在各个焊接位置来回移动。
35.本实用新型的工作过程如下:
36.本填丝焊接装置首先在地轨机器人14或其他移栽机构的带动下,沿着工件的焊接位置移动一遍,在移动过程中,所述焊缝寻位相机9会对工件的每一处焊缝进行依次焊前确认。焊缝确认后,本填丝焊接装置在地轨机器人14或其他移栽机构的带动下,开始对工件的每一处焊缝进行焊接。当焊缝较小时,所述摆动气缸801通过第一摆杆802、第二摆杆803和送丝管固定支架安装板804将送丝管5向外摆动,从而使得送丝嘴6远离激光焊接头1,此时对焊缝只进行激光焊接;当焊缝较大时,所述摆动气缸801通过第一摆杆802、第二摆杆803和送丝管固定支架安装板804将送丝管5向内摆动,从而使得送丝嘴6靠近激光焊接头1,此时送丝嘴6和保护气吹嘴均对准焊缝,在激光焊接的同时进行送丝和出保护气体,进而实现
填丝激光焊接。
37.本实用新型可以对箱体进行精确地激光填丝焊接,由于激光填丝焊接的平整度较高,因此箱体在焊接后无须再进行打磨。在实际生产中,箱体的板材可以在焊接前先进行喷涂工序,并且只需在边缘处留出焊接位置,等全部焊接完之后,再对焊接处进行补喷即可。这不仅可以避免产品因打磨而造成的形变,保证了产品的质量,而且减少了加工工序,提高了焊接效率,减少了劳动强度。
38.以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改和变化。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1