一种五金零件加工用自动攻牙机的制作方法
1.本实用新型涉及五金件加工技术领域,具体为一种五金零件加工用自动攻牙机。
背景技术:
2.攻牙机是一种在机件壳体、设备端面、螺母、法兰盘等各种具有不同规格的通孔或盲孔的零件的孔的内侧面加工出内螺纹、螺丝或叫牙扣的五金零件机械加工设备。但市场上现存的部分自动攻牙机虽然具备连续自动自动加工功能但其往往只能进行单一固定位点或横向移动进行加工位点的调整导致其加工范围较为有限,在对平面需要大量复数攻牙加工的物体进行加工过程中需要工作人员不断调整被加工物体的位置导致操作较为繁琐不便。
技术实现要素:
3.本实用新型的目的在于提供一种五金零件加工用自动攻牙机,以解决上述背景技术中市场上现存的部分自动攻牙机自动攻牙机构活动范围较为有限的问题。
4.为实现以上目的,本实用新型通过以下技术方案予以实现:一种五金零件加工用自动攻牙机,包括自动攻牙机,所述自动攻牙机的底部以矩形阵列的形式等间距固定安装有四个承载腿,且自动攻牙机的顶部固定连接有两个承载臂,两个所述承载臂的顶部通过横向位置调节机构固定连接,且横向位置调节机构的自由端固定安装有伺服液压伸缩臂,所述伺服液压伸缩臂的自由端固定安装有攻牙机构。
5.所述横向位置调节机构包括承载环、固定环槽、环形伺服线性电机、校准环槽、主转接块、直线伺服线性电机和承载框,且承载环的底部两侧分别固定安装在两个承载臂的顶部,且固定环槽开设在承载环的内壁,所述环形伺服线性电机固定连接在固定环槽内,且两个校准环槽以对称的形式开设在承载环的内壁处,所述主转接块的两端分别活动套接在两个校准环槽内,且直线伺服线性电机的两端分别固定安装在主转接块与环形伺服线性电机的自由端相对的一侧,且承载框内壁的顶部固定安装在直线伺服线性电机的自由端。
6.可选的,所述承载腿包括金属腿与橡胶垫,且橡胶垫的表面开设有磨砂纹。
7.可选的,所述环形伺服线性电机的自由端通过转接板与直线伺服线性电机固定连接,且转接板的高度与主转接块的高度相同。
8.可选的,所述承载框的正面呈口字型,且承载框内壁正面剖面的面积与直线伺服线性电机正面剖面的面积相同。
9.可选的,所述主转接块一端侧剖面的高度与校准环槽一端侧剖面的高度相同。
10.可选的,两个所述承载臂以对称的形式固定安装在承载环的底部,且两个辅动臂以对称的形式固定安装在承载框的左右两侧。
11.本实用新型的技术效果和优点:
12.1、通过承载腿包括金属腿与橡胶垫使承载腿在具备足够强度与使用寿命以保证能够长期支撑设备的同时也能够借助橡胶垫能够适应不同地形进行支撑的同时也避免划
伤地面的情况出现,且橡胶垫的表面开设有磨砂纹提高了橡胶垫与地面接触时所产生的摩擦力,以防橡胶垫在使用过程中出现打滑偏移等情况。
13.2、通过承载框的正面呈口字型使承载框内部预留了足够的活动空间以便于其在直线伺服线性电机的表面进行顺畅活动,且承载框内壁正面剖面的面积与直线伺服线性电机正面剖面的面积相同使承载框在预留了足够活动空间与安装空间的同时也保证了直线伺服线性电机与承载框连接状态的稳定性,以防承载框-在使用过程中出现位置偏移等情况。
附图说明
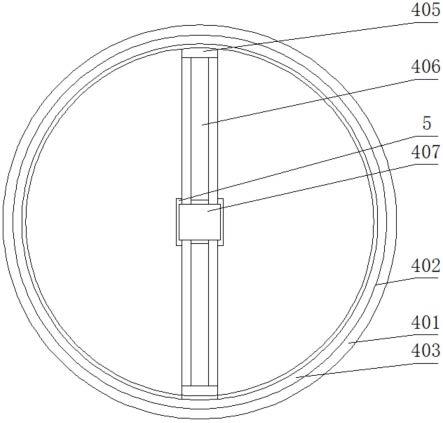
14.图1为本实用新型横向位置调节机构结构的俯剖面示意图;
15.图2为本实用新型结构的正面示意图;
16.图3为本实用新型承载环结构的示意图。
17.图中:1自动攻牙机、2承载腿、3承载臂、4横向位置调节机构、401承载环、402固定环槽、403环形伺服线性电机、404校准环槽、405主转接块、406直线伺服线性电机、407承载框、5伺服液压伸缩臂、6攻牙机构。
具体实施方式
18.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
19.本实用新型提供了如图1-3所示的一种五金零件加工用自动攻牙机,包括自动攻牙机1,自动攻牙机1的底部以矩形阵列的形式等间距焊接有四个承载腿2,承载腿2包括金属腿与橡胶垫,且橡胶垫的表面开设有磨砂纹,这样设置使承载腿2在具备足够强度与使用寿命以保证能够长期支撑设备的同时也能够借助橡胶垫能够适应不同地形进行支撑的同时也避免划伤地面的情况出现,且橡胶垫的表面开设有磨砂纹提高了橡胶垫与地面接触时所产生的摩擦力,以防橡胶垫在使用过程中出现打滑偏移等情况。
20.自动攻牙机1的顶部固定连接有两个承载臂3,两个承载臂3的顶部通过横向位置调节机构4固定连接,且横向位置调节机构4的自由端焊接有伺服液压伸缩臂5,该伺服液压伸缩臂5通过220v市电连接,其控制电源外置,伺服液压伸缩臂5的自由端焊接有攻牙机构6,该攻牙机构6通过220v市电连接,其控制电源外置。
21.横向位置调节机构4包括承载环401、固定环槽402、环形伺服线性电机403、校准环槽404、主转接块405、直线伺服线性电机406和承载框406,且承载环401的底部两侧分别焊接在两个承载臂3的顶部,且固定环槽402开设在承载环401的内壁,环形伺服线性电机403固定连接在固定环槽402内,且两个校准环槽404以对称的形式开设在承载环401的内壁处,主转接块405的两端分别活动套接在两个校准环槽404内,环形伺服线性电机403的自由端通过转接板与直线伺服线性电机406固定连接,且转接板的高度与主转接块405的高度相同,该环形伺服线性电机403通过220v市电连接,其控制电源外置,该直线伺服线性电机406通过220v市电连接,其控制电源外置。
22.直线伺服线性电机406的两端分别焊接在主转接块405与环形伺服线性电机403的
自由端相对的一侧,主转接块405一端侧剖面的高度与校准环槽404一端侧剖面的高度相同,且承载框407内壁的顶部焊接在直线伺服线性电机406的自由端,承载框407的正面呈口字型,且承载框407内壁正面剖面的面积与直线伺服线性电机406正面剖面的面积相同,这样设置使承载框407内部预留了足够的活动空间以便于其在直线伺服线性电机406的表面进行顺畅活动,且承载框407内壁正面剖面的面积与直线伺服线性电机406正面剖面的面积相同使承载框407在预留了足够活动空间与安装空间的同时也保证了直线伺服线性电机406与承载框407连接状态的稳定性,以防承载框4-8在使用过程中出现位置偏移等情况,两个承载臂3以对称的形式固定安装在承载环401的底部,且两个辅动臂409以对称的形式固定安装在承载框407的左右两侧。
23.其次本实用新型在使用过程中,通过使用者控制伺服液压伸缩臂5进行升降使攻牙机构6能够自由移动至所需高度以适应不同厚度的被加工物进行加工工作,此时使用者控制环形伺服线性电机403的自由端带动直线伺服线性电机406进行转动,并控制直线伺服线性电机406的自由端带动承载框407在其表面进行横向移动,并借助横向移动与转动使伺服液压伸缩臂5能够以圆形范围移动至任意位置以保证其能够移动至绝大部分所需位置进行加工工作,并以此提高了设备在加工过程中的活动范围与操作便捷性和工作效率。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1