缠绕垫自动套环机的制作方法
1.本实用新型涉及一种缠绕垫自动套环机 。
背景技术:
2.缠绕垫是一种常见的密封元件,缠绕垫有四种形式,一种是基本型,即由金属带材和石墨带交替盘绕所称的垫片;另一种是带金属内环的缠绕垫,即在基本型的基础上,于基本型的内圆加设金属内环;另一种是带金属外环的缠绕垫,即在基本型的基础上,于基本型的外圆加设金属外环;另一种是带金属内外环的缠绕垫,即在基本型的基础上,于基本型的内圆加设金属内环、于基本型的外圆加设金属外环。
3.cn 210789873 u 公开了一种缠绕垫全自动套环机构,其可实现基本型的外圈钢带自动卷绕,但是在生产带金属外环的缠绕垫时,还是无法实现自动化。
技术实现要素:
4.为克服现有缠绕垫全自动套环机构的上述,本实用新型提供一种自动化程度更高的缠绕垫自动套环机。
5.本实用新型解决其技术问题的技术方案是:缠绕垫自动套环机,包括机架、设于所述机架上的缠绕垫自动套环机构,所述的机架上还设有第一基本型套柱和第二基本型套柱,所述的第一基本型套柱和第二基本型套柱分别位于所述缠绕垫自动套环机构的左右两侧;
6.所述的机架上还设有位于所述第一基本型套柱和第二基本型套柱上方的横梁,所述的横梁上滑设有第一滑块和第二滑块,所述横梁上设有驱动所述的第一滑块以及第二滑块滑动的横移驱动机构;
7.所述的第一滑块上滑设有第一升降块以及驱动该第一升降块升降的第一升降驱动机构,所述的第二滑块上滑设有第二升降块以及驱动该第二升降块升降的第二升降驱动机构;
8.所述的第一升降块以及第二升降块上分别设有用于抓取基本型的基本型抓取机构;
9.所述的机架上还设有外环套柱和成品套柱,所述的外环套柱和成品套柱分别位于所述缠绕垫自动套环机构的前后两侧;
10.所述的机架上还设有位于所述外环套柱和成品套柱上方的纵梁,所述的纵梁上滑设有第三滑块和第四滑块,所述纵梁上设有驱动所述的第三滑块以及第四滑块滑动的纵移驱动机构;
11.所述的第三滑块上滑设有第三升降块以及驱动该第三升降块升降的第三升降驱动机构,所述的第四滑块上滑设有第四升降块以及驱动该第四升降块升降的第四升降驱动机构;
12.所述的第三升降块以及第四升降块上分别设有用于抓取外环的外环抓取机构。
13.进一步,所述的机架上还设有位于所述第一基本型套柱下方的第一顶升气缸、位于所述第二基本型套柱下方的第二顶升气缸,所述的第一顶升气缸的输出端设有套于所述第一基本型套柱外的第一顶环,所述的第二顶升气缸的输出端设有套于所述第二基本型套柱外的第二顶环。
14.进一步,所述的基本型抓取机构为真空吸头或弹性夹头。
15.进一步,所述的外环抓取机构为真空吸头或弹性夹头。
16.第一基本型套柱和第二基本型套柱上均套设有基本型,外环套柱上套设有金属外环,使用时,横移驱动机构驱动第一滑块和第二滑块在横梁上移动,以使第一滑块上的基本型抓取机构对准第一基本型套柱,从而第一升降驱动机构驱动第一升降块下降,基本型抓取机构可抓取套在第一基本型套柱上的基本型;而第二滑块上的基本型抓取机构已抓取第二基本型套柱上的基本型并对准了缠绕垫自动套环机构,第二升降驱动机构驱动第二升降块下降,第二升降块上的基本型抓取机构下降,进而将基本型放置在缠绕垫自动套环机构上;
17.纵移驱动机构驱动第三滑块和第四滑块在纵梁上移动,以使第三滑块上的外环抓取机构对准外环套柱,从而第三升降驱动机构驱动第三升降块下降,外环抓取机构可抓取套在外环套柱上的金属外环;而第四滑块上的外环抓取机构对准了缠绕垫自动套环机构,第四升降驱动机构驱动第四升降块下降,第四升降块上的外环抓取机构下降,进而将已经缠绕垫自动套环机构套环完成的成品拾起。之后第三滑块和第四滑块再次滑动,使得被拾起的成品对准成品套柱、被拾起的外环对准缠绕垫自动套环机构,两外环抓起机构再次下降后,成品套在成品套柱上整齐排列,而金属外环放置在缠绕垫自动套环机构上,通过缠绕垫自动套环机构上将金属外环和基本型套环组装。
18.本实用新型的有益效果在于:实现了带金属外环的缠绕垫的自动套环装配,生产效率更高。
附图说明
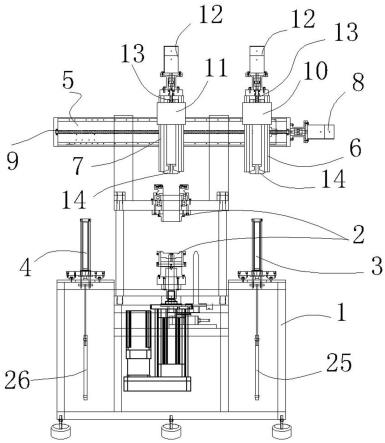
19.图1是本实用新型的主视图。
20.图2是本实用新型的侧视图。
具体实施方式
21.下面结合附图和具体实施方式对本实用新型作进一步详细说明。
22.参照图1、图2,缠绕垫自动套环机,包括机架1、设于所述机架1上的缠绕垫自动套环机构2,缠绕垫自动套环机构2为cn 210789873 u 中的机构,在此不再赘述。所述的机架1上还设有第一基本型套柱3和第二基本型套柱4,所述的第一基本型套柱3和第二基本型套柱4分别位于所述缠绕垫自动套环机构2的左右两侧。
23.所述的机架1上还设有位于所述第一基本型套柱3和第二基本型套柱4上方的横梁5,所述的横梁5上滑设有第一滑块6和第二滑块7,所述横梁5上设有驱动所述的第一滑块5以及第二滑块6滑动的横移驱动机构。本实施例中该横移驱动机构包括设于横梁上的横移驱动电机8,横移驱动电机8的输出端连接横移驱动丝杆9,横移驱动丝杆9穿入第一滑块6和第二滑块7,启动横移驱动电机8后横移驱动丝杆9旋转,即可带动第一滑块6和第二滑块7沿
着横梁5横移。当然,为了使第一滑块6和第二滑块7在横梁5上的滑动更顺畅,可在横梁5上设滑轨,将第一滑块6和第二滑块7设于滑轨上。
24.所述的第一滑块6上滑设有第一升降块10以及驱动该第一升降块10升降的第一升降驱动机构,所述的第二滑块7上滑设有第二升降块11以及驱动该第二升降块11升降的第二升降驱动机构。本实施例中,第一升降驱动机构和第二升降驱动机构都采用同样的机构:包括升降电机12,升降电机12的输出端连接升降驱动丝杆13,升降驱动丝杆13分别穿入第一升降块10、第二升降块11。
25.所述的第一升降块10以及第二升降块11上分别设有用于抓取基本型的基本型抓取机构14。基本型抓取机构14可采用多种机构形式,只要能抓取基本型即可,本实施例中,基本型抓取机构14可采用真空吸头或弹性架头,真空吸头和弹性架头是机加工领域常见的工件拾取机构,在此不再赘述。
26.所述的机架1上还设有外环套柱15和成品套柱16,所述的外环套柱15和成品套柱16分别位于所述缠绕垫自动套环机构2的前后两侧。
27.所述的机架1上还设有位于所述外环套柱15和成品套柱16上方的纵梁17,所述的纵梁17上滑设有第三滑块18和第四滑块19,所述纵梁17上设有驱动所述的第三滑块18以及第四滑块19滑动的纵移驱动机构。本实施例中该纵移驱动机构包括设于纵梁17上的纵移驱动电机20,纵移驱动电机20的输出端连接纵移驱动丝杆21,纵移驱动丝杆21穿入第三滑块18和第四滑块19,启动纵移驱动电机20后纵移驱动丝杆21旋转,即可带动第三滑块18和第四滑块19沿着纵梁17纵移。当然,为了使第三滑块18和第四滑块19在纵梁17上的滑动更顺畅,可在纵梁17上设滑轨,将第三滑块18和第四滑块19设于滑轨上。
28.所述的第三滑块18上滑设有第三升降块22以及驱动该第三升降块升降22的第三升降驱动机构,所述的第四滑块19上滑设有第四升降块23以及驱动该第四升降块23升降的第四升降驱动机构。第三、第四升降驱动机构也可采用去前述第一、第二升降驱动机构所述的丝杆机构,在此不再赘述。
29.所述的第三升降块22以及第四升降块23上分别设有用于抓取外环的外环抓取机构24。本实施例中,外环抓取机构24可采用真空吸头或弹性架头,真空吸头和弹性架头是机加工领域常见的工件拾取机构,在此不再赘述。
30.第一基本型套柱3和第二基本型套柱4上均套设有基本型,外环套柱15上套设有金属外环,使用时,横移驱动机构驱动第一滑块6和第二滑块7在横梁5上移动,以使第一滑块6上的基本型抓取机构14对准第一基本型套柱3,从而第一升降驱动机构驱动第一升降块10下降,基本型抓取机构14可抓取套在第一基本型套柱3上的基本型;而第二滑块7上的基本型抓取机构14已抓取第二基本型套柱4上的基本型并对准了缠绕垫自动套环机构2,第二升降驱动机构驱动第二升降块11下降,第二升降块11上的基本型抓取机构14下降,进而将基本型放置在缠绕垫自动套环机构2上。
31.为了使抓取基本型更顺利,所述的机架1上还设有位于所述第一基本型套柱3下方的第一顶升气缸25、位于所述第二基本型套柱4下方的第二顶升气缸26,所述的第一顶升气缸25的输出端设有套于所述第一基本型套柱3外的第一顶环,所述的第二顶升气缸26的输出端设有套于所述第二基本型套柱4外的第二顶环,通过第一顶升气缸25和第二顶升气缸26将第一顶环和第二顶环顶起,从而将堆叠在第一顶环和第二顶环上的基本型顶起至第一
基本型套柱3和第二基本型套柱4的顶端,便于基本型抓起机构14将基本型抓起。
32.纵移驱动机构驱动第三滑块18和第四滑块14在纵梁上移动,以使第三滑块18上的外环抓取机构24对准外环套柱15,而第三升降驱动机构驱动第三升降块22下降,外环抓取机构24可抓取套在外环套柱15上的金属外环;而第四滑块19上的外环抓取机构24对准了缠绕垫自动套环机构2,第四升降驱动机构驱动第四升降块23下降,第四升降块23上的外环抓取机构24下降,进而将已经缠绕垫自动套环机构套环完成的成品拾起。之后第三滑块18和第四滑块19再次滑动,使得被拾起的成品对准成品套柱16、被拾起的外环对准缠绕垫自动套环机构2,两外环抓起机构再次下降后,成品套在成品套柱16上整齐排列,而金属外环放置在缠绕垫自动套环机构2上,通过缠绕垫自动套环机构2上将金属外环和基本型套环组装。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1