一种三轴焊接机器人的制作方法
1.本实用新型涉及机械领域,尤其涉及到机械部件技术领域,具体是指一种三轴焊接机器人。
背景技术:
2.焊接,也称作熔接,是一种以加热、高温或者高压的方式接合金属或其他热塑性材料如塑料的制造工艺及技术。
3.现代焊接的能量来源有很多种,包括气体焰、电弧、激光、电子束、摩擦和超声波等。除了在工厂中使用外,焊接还可以在多种环境下进行,如野外、水下和太空。无论在何处,焊接都可能给操作者带来危险,所以在进行焊接时必须采取适当的防护措施。焊接给人体可能造成的伤害包括烧伤、触电、视力损害、吸入有毒气体、紫外线照射过度等。
4.目前焊接是由焊接工人来完成实现的,这种焊接方式的焊接效果取决于焊机工人的熟练程度,再加上,在工地或者施工现场焊接条件差,因此焊接的质量和速度不稳定,又或者是现场没有专业的焊接人员,很容易造成生产的停滞。
技术实现要素:
5.本实用新型针对现有技术的不足,提供一种三轴焊接机器人,代替人工进行焊接,操作简单,保证焊接质量和速度。
6.本实用新型是通过如下技术方案实现的,一种三轴焊接机器人,包括夹持把手的夹持装置,驱动夹持装置横向移动的第一驱动装置、驱动夹持装置沿竖向公转的第二驱动装置,以及驱动夹持装置摆动的第三驱动装置。
7.本实用新型在使用时,通过夹持装置将焊接的把手夹持住,并通过第一驱动装置、第二驱动装置,调节把手的位置,并通过第三驱动装置带动把手摆动来进行焊接,代替焊接工人,操作简单,保证焊接质量和速度。
8.作为优选,所述第一驱动装置包括支座、滑接在支座上的且横向延伸的圆齿条,以及与圆齿条配合的齿轮,所述支座上还设有驱动齿轮转动的第一电机,所述夹持装置连接在圆齿条上。
9.本实用新型在使用时,驱动第一电机带动齿轮转动,齿轮转动带动圆齿条沿横向移动,从而带动夹持装置沿横向移动。
10.作为优选,所述圆齿条上螺纹连接套接在圆齿条上的十字接头,所述十字接头包括两个横向排布的连接柱,两个连接柱上均开设有供圆齿条贯穿且与圆齿条适配的第一穿孔,一个连接柱上还开设有横向贯穿连接柱的第二穿孔,另一个连接柱上还开设有纵向贯穿连接柱的第三穿孔,第二穿孔或第三穿孔内插设有连接杆,所述连接杆与所述夹持装置连接。
11.本实用新型在使用时,首先确定连接杆的延伸方向,以连接杆沿纵向延伸为例,开设有第三穿孔的连接柱套接在圆齿条上,再将连接杆插入到第三穿孔内,然后调节连接杆
的位置来调节夹持装置纵向的位置。
12.作为优选,所述第二驱动装置包括底座,设置的底座上的第二电机,以及轴线沿竖向延伸的第一同步带轮,所述第二电机上连接有第二同步带轮,所述第一同步带轮和第二同步带轮通过皮带连接,所述支座固接在第一同步带轮上。
13.本实用新型在使用时,驱动第二电机转动,在皮带和第二同步轮的带动下,驱动第一同步轮转动,从而带动支座转动,支座的转动通过圆齿条、连接杆带动夹持装置绕第一同步轮转动。
14.作为优选,所述第三驱动装置包括与所述连接杆可拆卸连接的固定块,所述夹持装置轴接在固定块上,所述夹持装置上还固接有开设有长孔的摆动板,所述摆动板内穿设有摆杆,摆杆的一端固接在偏心盘的偏心位置,所述偏心盘与第三电机的输出轴连接,所述第三电机可拆卸连接在固定块上。
15.本优选方案在使用时,驱动第三电机转动,第三电机带动偏心盘转动,偏心盘带动摆杆绕偏心盘的轴线转动,摆杆在长孔内转动,从而带动夹持装置来回摆动。
16.作为优选,所述夹持装置包括位于把手两侧且螺纹连接的第一夹板和第二夹板,所述第一夹板位于固定板和第二夹板之间,且第一夹板通过铰接轴接在固定块上。
17.本优选方案在使用时,将把手放置于第一夹板和第二夹板之间,然后用螺栓将第一夹板和第二夹板螺纹连接,从而实现把手的夹持。
18.本实用新型的有益效果为:通过夹持装置将焊接的把手夹持住,并通过第一驱动装置、第二驱动装置,调节把手的位置,并通过第三驱动装置带动把手摆动来进行焊接,代替焊接工人,操作简单,保证焊接质量和速度;驱动第一电机带动齿轮转动,齿轮转动带动圆齿条沿横向移动,从而带动夹持装置沿横向移动;驱动第二电机转动,在皮带和第二同步轮的带动下,驱动第一同步轮转动,从而带动支座转动,支座的转动通过圆齿条、连接杆带动夹持装置绕第一同步轮转动。
附图说明
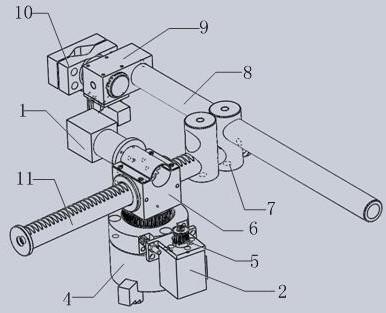
19.图1为本实用新型结构立体示意图;
20.图2为夹持装置处立体示意图;
21.图中所示:
22.1、第一电机,2、第二电机,3、第三电机,4、底座,5、第二同步带轮,6、支座,7、连接柱,8、连接杆,9、固定块,10、夹持装置,11、圆齿条,12、摆动板,13、第一夹板,14、第二夹板,15、偏心盘,16、摆杆。
具体实施方式
23.为能清楚说明本方案的技术特点,下面通过具体实施方式,对本方案进行阐述。
24.参照附图1-2,本实用新型一种三轴焊接机器人,包括夹持把手的夹持装置10,夹持装置10包括位于把手两侧且螺纹连接的第一夹板13和第二夹板14,第一夹板13与把手接触的侧面上开设有与把手适配的圆弧,第二夹板14与把手接触的侧面上也开设有与把手适配的圆弧,第一夹板13通过铰接轴接在固定块9上,第一夹板13位于固定板和第二夹板14之间。
25.第一夹板13的底面还固接有开设有长孔的摆动板12,摆动板12内穿设有摆杆16,摆杆16的一端固接在偏心盘15的偏心位置,偏心盘15与第三电机3的输出轴连接,第三电机3可拆卸连接在固定块9的底面上。
26.固定块9上开设有贯穿固定块9的第四穿孔,第四穿孔的轴线与铰接轴的轴线平行,第四穿孔内穿设有连接杆8,连接杆8与固定块9螺纹连接,连接杆8还穿设在十字接头上。
27.十字接头包括包括两个横向排布的连接柱7,两个连接柱7上均开设有沿横向贯穿连接柱7的第一穿孔,一个连接柱7上还开设有横向贯穿连接柱7的第二穿孔,另一个连接柱7上还开设有纵向贯穿连接柱7的第三穿孔,连接杆8贯穿第二穿孔或第三穿孔,连接杆8螺纹连接在连接柱7上。
28.第一穿孔内穿设有沿横向延伸且沿横向移动的圆齿条11,圆齿条11滑接在支座6上,支座6上还设有第一电机1,第一电机1的输出轴上固接有齿轮,齿轮与圆齿条11啮合。
29.支座6固接在第一同步轮的顶面上,第一同步轮的轴线沿竖向延伸的,且第一同步轮轴接在底座4上,底座4上还固接有第二电机2,第二电机2上连接有第二同步带轮5,所述第一同步带轮和第二同步带轮5通过皮带连接。
30.特别的如附图1所示,圆齿条11的延伸方向为横向,连接杆8的延伸方向为纵向,高度方向为竖向。
31.本实用新型在使用时,将把手放置于第一夹板13和第二夹板14之间,然后用螺栓将第一夹板13和第二夹板14螺纹连接,从而实现把手的夹持;
32.然后确定连接杆8的延伸方向,连接杆8沿纵向延伸,将开设有第三穿孔的连接柱7套接在圆齿条11上,再将连接杆8插入到第三穿孔内,然后调节连接杆8的位置来调节夹持装置10纵向的位置;
33.接下来,驱动第一电机1带动齿轮转动,齿轮转动带动圆齿条11沿横向移动,从带动节把手横向移动;
34.再者,驱动第二电机2转动,在皮带和第二同步轮的带动下,驱动第一同步轮转动,从而带动支座6转动,支座6的转动通过圆齿条11、连接杆8带动把手绕第一同步轮转动;
35.最后驱动第三电机3转动,第三电机3带动偏心盘15转动,偏心盘15带动摆杆16绕偏心盘15的轴线转动,摆杆16在长孔内转动,从而带动夹持装置10来回摆动,来实现焊接。
36.当然,上述说明也并不仅限于上述举例,本实用新型未经描述的技术特征可以通过或采用现有技术实现,在此不再赘述;以上实施例及附图仅用于说明本实用新型的技术方案并非是对本实用新型的限制,参照优选的实施方式对本实用新型进行了详细说明,本领域的普通技术人员应当理解,本技术领域的普通技术人员在本实用新型的实质范围内所做出的变化、改型、添加或替换都不脱离本实用新型的宗旨,也应属于本实用新型的权利要求保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1