一种夹紧周转机构的制作方法
1.本实用新型涉及夹具技术领域,尤其是涉及一种夹紧周转机构。
背景技术:
2.机械制造过程中用来固定加工对象,使之占有正确的位置,以接受施工或检测的装置,称为夹具。从广义上说,在工艺过程中的任何工序,用来迅速、方便、安全地安装工件的装置,都可称为夹具,例如焊接夹具、检验夹具、装配夹具、机床夹具等。
3.目前,夹具,如工装夹具在生产过程中,自动化程度低,难以很好地进行各工序之间的衔接,因此需要大量人工进行辅助生产,会存在工人强度大、生产效率低的问题。同时,现有的工装夹具,对于工件的装夹和拆卸上比较麻烦,且难以适应不同大小的工件的装夹,因此存在拆装麻烦、适用范围小的问题。此外,现有的工装夹具在夹紧工件之后,夹具与工件之间为硬性接触,因此会对工件形成较大的压力,所以容易造成工件表面损坏的情况。
4.因而,有必要提供一种可以提高工装夹具的自动化程度、生产效率和适用范围、并方便工件拆装和减少工件装夹损坏的技术方案。
技术实现要素:
5.本实用新型提出一种夹紧周转机构,以解决现有的工装夹具自动化程度低、生产效率低、及工件拆装麻烦、适用范围小和容易造成工件损坏的问题。
6.本实用新型采用的技术方案如下:一种夹紧周转机构,包括夹紧组件;所述夹紧组件包括底板、扭簧推杆、和两个抱爪;所述底板上设置有用于放置工件的定位型腔;两个所述抱爪可移动设置在所述底板上,且分别位于所述定位型腔的两侧,两个所述抱爪与所述底板之间均连接有弹簧;所述扭簧推杆可移动设置在所述底板上;
7.借由所述扭簧推杆驱动所述抱爪远离所述定位型腔并挤压所述弹簧,以在所述定位型腔中放入工件,再在所述弹簧的复位下驱动所述抱爪靠近所述定位型腔以夹紧工件。
8.在一实施方式中,还包括周转组件;所述周转组件包括支撑板;所述支撑板上可拆卸设置有至少一个所述夹紧组件。
9.在一实施方式中,所述支撑板上设置有连接孔,所述底板上设置有配合孔,每一所述连接孔均与一所述配合孔相对应,以安装螺钉将所述夹紧组件固定在所述支撑板上。
10.在一实施方式中,所述支撑板上间隔设置有两个限位块;两个所述限位块上均具有所述连接孔;所述夹紧组件安装在两个所述限位块之间。
11.在一实施方式中,所述支撑板上设置有两个所述夹紧组件;两个所述夹紧组件并列设置在两个所述限位块之间,且分别与一所述限位块连接。
12.在一实施方式中,还包括夹具板;所述夹具板上可拆卸设置有至少一所述周转组件。
13.在一实施方式中,所述夹具板上可拆卸设置有压杆,所述压杆搭接在所述周转组件的边缘处;所述压杆上设置有第一螺纹孔,所述夹具板上设置有第二螺纹孔,所述第一螺
纹孔与所述第二螺纹孔相对应,以安装螺钉将所述周转组件固定在所述夹具板上。
14.在一实施方式中,所述夹具板上对称设置有两个所述周转组件;两个所述周转组件之间可拆卸设置有连接块。
15.在一实施方式中,所述夹具板的边缘处设置有供所述扭簧推杆移动的槽口。
16.在一实施方式中,所述底板上可拆卸设置有保护罩;所述保护罩上设置有开口,且所述开口位于所述定位型腔的上方。
17.本实用新型的有益效果是:
18.本技术中,通过扭簧推杆驱动抱爪远离定位型腔,以此可在定位型腔中放入工件,此时,抱爪会挤压侧边的弹簧,因此在扭簧推杆松开对抱爪的限位后,抱爪会在弹簧的复位弹力下靠近定位型腔,以此夹紧工件,而通过弹簧来驱动抱爪实现夹紧动作,可适应不同大小的工件,从而提高适用范围,并方便工件的拆装;同时,由弹簧驱动夹紧,使得抱爪与工件之间为柔性接触,能在最大程度上保护装夹工件;此外,本技术操作简单,无需人工过多辅助,可提高自动化程度,并以此提高生产效率。
附图说明
19.附图是用来提供对本实用新型的进一步理解,并构成说明书的一部分,与下面的具体实施方式一起用于解释本实用新型,但不应构成对本实用新型的限制。在附图中:
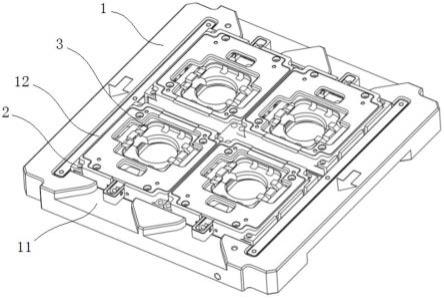
20.图1为本实用新型一实施例的结构示意图;
21.图2为本实用新型一实施例周转组件的结构示意图;
22.图3为本实用新型一实施例夹紧组件的结构示意图;
23.图4为本实用新型一实施例夹紧组件处于张开状态下的结构示意图;
24.图5为本实用新型一实施例夹紧组件处于张开状态下的剖视图;
25.图6为本实用新型一实施例夹紧组件处于夹紧状态下的结构示意图;
26.图7为本实用新型一实施例夹紧组件处于夹紧状态下的剖视图。
27.附图标注说明:1、夹具板;11、槽口;12、压杆;2、周转组件;20、支撑板;21、限位块;22、连接孔;23、延伸部;24、连接块;3、夹紧组件;31、底板;32、扭簧推杆;33、保护罩;34、抱爪;35、弹簧;36、定位型腔;37、配合孔;38、倾斜部;39、卡槽。
具体实施方式
28.以下结合附图对本实用新型的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本实用新型,并不用于限制本实用新型。
29.本实用新型提供了一种夹紧周转机构。
30.请参阅图1-3,图1显示了夹紧周转机构的结构示意图,图2显示了周转组件2的结构示意图,图3显示了夹紧组件3的结构示意图。本实施例中,工件主要在夹紧组件3上进行夹持,夹紧组件3能与支撑板20组成周转组件2,而周转组件2放置于夹具板1上,夹具板1放置于自动化生产线的周转盘上,以此让工件进行周转流动。
31.以下介绍夹紧组件3。
32.请参阅图3、5,本实施例中,夹紧组件3包括底板31、扭簧推杆32、和两个抱爪34。底板31上设置有定位型腔36,定位型腔36用于放置工件,并对其进行初步定位。而两个抱爪34
可移动设置在底板31上,且分别位于定位型腔 36的两侧,同时,两个抱爪34远离定位型腔36的一侧与底板31之间均连接有弹簧35。而扭簧推杆32可移动设置在底板31的上部,其中,扭簧推杆32往下移动过程中,会逐渐与两个抱爪34接触,以此推动两个抱爪34远离定位型腔 36,并使抱爪34挤压弹簧35。此时,便可将工件放置于定位型腔36中,而当再次按压扭簧推杆32、使其往上移动时,便会让扭簧推杆32松开对抱爪34的限位。这时候,抱爪34会在弹簧35的复位弹力下往定位型腔36处移动,以此将定位型腔36中的工件夹紧,而通过弹簧35来驱动抱爪34实现夹紧动作,可适应不同大小的工件,从而可提高适用范围,并方便工件的拆装;同时,由弹簧35驱动夹紧,使得抱爪34与工件之间为柔性接触,能在最大程度上保护装夹工件。此外,本技术操作简单,仅需人工按压扭簧推杆32,无需再进行其他辅助操作,因此可提高自动化程度,并提高生产效率。
33.而在另一实施例中,为了进一步提高夹紧组件3的自动化,可设置气缸,通过气缸来按压扭簧推杆32,以此完成扭簧推杆32的自动化驱动。
34.进一步的,请继续参阅图5,为了方便扭簧推杆32推动抱爪34,本实施例中,抱爪34的上部设置有倾斜部38,且两个抱爪34对称设置在底板31上,使得两个倾斜部38之间的空间由上往下逐渐缩小,从而让扭簧推杆32在往下移动过程中,可逐渐将两个抱爪34向两侧推开。
35.进一步的,请继续参阅图3,本实施例中,在底板31上可拆卸设置有保护罩33,保护罩33可通过螺栓、螺钉等方式紧固在底板31的上部,并罩在各部件的上方,以此形成防护效果,且保护罩33上设置有开口,该开口位于定位型腔36的上方,以此在实现防护的同时,能通过开口将工件放置到定位型腔36 中,以保证装夹工作。
36.以下介绍周转组件2。
37.请参阅图2,本实施例中,周转组件2包括支撑板20;支撑板20上可拆卸设置有至少一个夹紧组件3。其中,支撑板20与夹紧组件3的连接方式设置为:在支撑板20上设置有连接孔22,在底板31上设置有配合孔37,每一连接孔22 均与一配合孔37相对应,以此在两个孔位中安装螺钉,从而将夹紧组件3固定在支撑板20上,并以此实现两者之间的可拆卸连接。具体的,本实施例中,连接孔22和连接孔22的具体位置为:在支撑板20上设置有两个限位块21,限位块21的两侧向上90
°
弯折,以此形成倒置的l形结构,连接孔22位于该弯折结构的上部(参见图2),而配合孔37位于底板31的边角处,因此,在将夹紧组件3安装到两个对称设置的限位块21之间时,能使底板31的配合孔37轻易对准限位块21上的连接孔22,从而可以快速进行夹紧组件3的拆装。
38.进一步的,本实施例中,支撑板20上设置有两个夹紧组件3,两个夹紧组件3并列设置在两个限位块21之间,且两个夹紧组件3分别与一限位块21连接。
39.以下介绍周转组件2如何设置在夹具板1上。
40.请参阅图1、2,本实施例中,还包括夹具板1;夹具板1上可拆卸设置有至少一个周转组件2。其中,夹具板1与周转组件2的连接方式设置为:在夹具板 1上设置有压杆12,压杆12上设置有第一螺纹孔,夹具板1上设置有第二螺纹孔;在将周转组件2稳定放置到夹具板1上的时候,再将压杆12搭接在周转组件2的边缘处,并使第一螺纹孔孔一一对应第二螺纹孔,以此在孔位中安装螺钉,从而可以将周转组件2紧固在夹具板1上。具体的,本实施例中,压杆12 对周转组件2的具体固定方式设置为:支撑板20的两侧设置为延伸部23,夹具板1的
两侧均具有一个压杆12,且两个压杆12分别位于支撑板20两侧的延伸部23上,在将压杆12拧紧的时候,便可将支撑板20固定在夹具板1上,即将周转组件2固定在夹具板1上。
41.请继续参阅图1,本实施例中,夹具板1的边缘处设置有槽口11,槽口11 用于提供位置,以适应扭簧推杆32的移动。
42.进一步的,请继续参阅图2,夹具板1上设置有两个周转组件2,且两个周转组件2对称设置。进一步的,为了提高两个周转组件2之间的稳定性,本实施例中,在两个周转组件2之间可拆卸设置有连接块24,通过连接块24将两个周转组件2连接起来,从而提高周转组件2在夹具板1上的放置稳定性。具体的,连接块24的两端均设置有与底板31的配合孔37相对应的孔位,以此安装螺钉,从而通过连接块24将相邻的四个夹紧组件3连接起来,即实现将相邻的两个周转组件2连接起来。
43.以下介绍夹紧机构的装夹过程:
44.在需要装夹工件的时候,先按压扭簧推杆32,使其往下移动,从而推动抱爪34,使抱爪34逐渐远离定位型腔36,当扭簧推杆32移动到最低处的时候,扭簧推杆32上的卡槽39(参见图2)会卡入底板31的卡块(图中未示出)中,以此将扭簧推杆32固定住。此时,夹紧组件3处于张开状态(参见图4、5,),定位型腔36两侧的抱爪34会挤压弹簧35。接着,可以将工件放置到定位型腔 36中,通过定位型腔36来对工件进行初步定位,然后,再次按压扭簧推杆32,此时,扭簧推杆32内部的扭簧恢复,使扭簧推杆32往上移动,以此让扭簧推杆 32松开对抱爪34的限位。而在没有了扭簧推杆32的限位之后,弹簧35会复位,并驱动抱爪34往定位型腔36处移动,以此让抱爪34将定位型腔36中的工件夹持住(参见图6、7),从而完成装夹工作,并以此适应不同大小的工件装夹。而在需要将工件取出来的时候,可通过再次按压扭簧推杆32,从而使抱爪34松开对工件的夹紧。
45.与现有技术相比:本技术中,通过弹簧35来驱动抱爪34实现夹紧动作,可适应不同大小的工件,从而提高适用范围,且该夹紧方式操作简单,方便工件的拆装;同时,由弹簧35驱动夹紧,使得抱爪34与工件之间为柔性接触,能在最大程度上保护装夹工件;此外,本技术操作简单,无需人工过多辅助,可提高自动化程度,并以此提高生产效率,而且结构简单,体积小,可节约设备成本。
46.只要不违背本实用新型创造的思想,对本实用新型的各种不同实施例进行任意组合,均应当视为本实用新型公开的内容;在本实用新型的技术构思范围内,对技术方案进行多种简单的变型及不同实施例进行的不违背本实用新型创造的思想的任意组合,均应在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1