组合件锁附生产线的制作方法
1.本实用新型属于3c产品组合技术领域,尤其涉及一种组合件锁附生产线。
背景技术:
2.在3c产品领域中,往往会有多个部件进行组合组装,然后螺丝锁附固定。例如scorpius hsg和bracket小件。即,一片状体,片状体上有小件安装定位孔,然后小件安装于定位孔,最终利用螺丝锁附在一起。
3.传统的组装方式为:人工将不同的部件进行多个操作区域的加工,然后经过调度最后进行螺丝锁附固定。
4.例如,中国专利公开了一种充电器hsg点胶设备,专利号cn202120148401.7,该专利旨在解决点胶问题,以及该方案其并不能彻底解决多个部件组装效率低的问题。
技术实现要素:
5.本实用新型的目的是针对上述问题,提供一种可以解决上述技术问题的组合件锁附生产线。
6.为达到上述目的,本实用新型采用了下列技术方案:
7.本组合件锁附生产线a件置放平台、点胶装置、b件置放平台和中转平台,以及还包括a件机械手和b件机械手,所述a件机械手用于从所述a件置放平台上取得a件并转移释放于所述点胶装置上,并且所述a件机械手还从所述点胶装置点胶处理后的a件取得并转移释放于所述中转平台上,所述b件机械手用于从b件置放平台上取得b件并转移置放于所述中转平台上的a件上。
8.在上述的组合件锁附生产线中,所述点胶装置为双工位点胶机。
9.在上述的组合件锁附生产线中,所述中转平台包括机台,在所述机台顶部设有转动盘,在所述转动盘上设有若干呈圆周均匀分布的工件定位治具,所述的转动盘与转动驱动机构连接。
10.在上述的组合件锁附生产线中,所述机台上还设有位于所述工件定位治具上方的防护板,所述防护板通过若干连接柱固定于机台。
11.在上述的组合件锁附生产线中,所述工件定位治具包括固定于所述转动盘上的固定座,在所述固定座上设有倾斜向下朝外的治具板,在所述治具板的竖向两相对侧边中的其中一侧边设有定位挡块,在另外一侧边设有能相对所述定位挡块平移的移动块,所述移动块与平移驱动器连接,在所述治具板的外表面下侧边设有底部承托块,在所述治具板的下侧设有与治具板铰接的翻转压块。
12.在上述的组合件锁附生产线中,所述治具板上设有通孔,在所述转动盘上设有对准所述通孔的检测传感器。
13.在上述的组合件锁附生产线中,所述a件置放平台、a件机械手和中转平台位于同一直线上并且间隔分布。
14.在上述的组合件锁附生产线中,所述点胶装置、b件机械手和b件置放平台位于同一直线上并且间隔分布。
15.在上述的组合件锁附生产线中,所述组合件锁附生产线还包括下料机械手,用于将所述中转平台上的组合件取得并转移至中转平台外。
16.在上述的组合件锁附生产线中,所述b件置放平台包括机柜,在所述机柜的顶部设有与所述机柜内部连通的连通口,在所述机柜内设有升降驱动器,在所述升降驱动器上连接有位于所述连通口中的升降料框,在所述机柜顶部设有位于所述升降料框出料口的料盘机械手,以及所述料盘机械手和平移驱动气缸连接,在所述机柜顶部设有用于承载被拉出料盘的料盘承载架。
17.与现有的技术相比,本技术的优点在于:
18.集成的生产线方式,不仅解决了组装效率低的问题,而且还确保了产品组装质量的一致性,确保产品的组装合格率。
19.降低了劳动强度,以及降低了人工成本。
附图说明
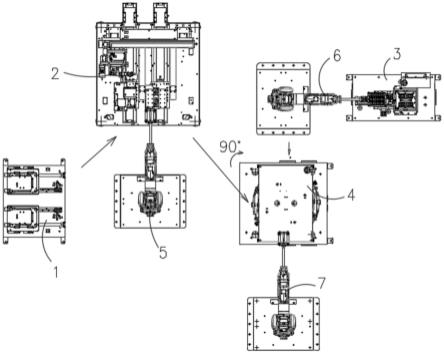
20.图1是本实用新型提供的组合件锁附生产线俯视结构示意图。
21.图2是本实用新型提供的组合件锁附生产线立体结构示意图。
22.图3是本实用新型提供的b件置放平台结构示意图。
23.图4是本实用新型提供的中转平台结构示意图。
24.图中,a件置放平台1、平移承载料架10、点胶装置2、b件置放平台3、机柜30、连通口31、升降驱动器32、升降料框33、料盘机械手34、平移驱动气缸35、料盘承载架36、中转平台4、机台40、转动盘41、工件定位治具42、固定座420、治具板421、定位挡块422、移动块423、底部承托块424、翻转压块425、通孔426、检测传感器427、防护板43、连接柱44、a件机械手5、b件机械手6、下料机械手7。
具体实施方式
25.以下是实用新型的具体实施例并结合附图,对本实用新型的技术方案作进一步的描述,但本实用新型并不限于这些实施例。
26.实施例一
27.如图1和图2所示,本组合件锁附生产线包括a件置放平台1、点胶装置2、b件置放平台3、中转平台4、a件机械手5、b件机械手6和下料机械手7。
28.本实施例中的a件机械手5、b件机械手6和下料机械手7均为工业机器人,为商购件。
29.具体地,a件置放平台1的顶部设有平移承载料架10,平移承载料架10和气缸连接。例如,a件料盘放置于平移承载料架10上,平移承载料架10可以靠近a件机械手5,也可以远离a件机械手5。
30.点胶装置2为ab胶点胶,属于现有技术。不过本技术的点胶装置2为双工位点胶装置,即,设计了两个承载a件的工位,以满足生产要求。双工位即为线性移动导轨组件,在线性移动导轨组件上有a件固定治具,a件固定治具的结构和a件相仿,属于商购件。
31.如图3所述,b件置放平台3包括机柜30,在机柜30的顶部设有与机柜30内部连通的连通口31,在机柜30内设有升降驱动器32,升降驱动器32为气缸或者油缸,在升降驱动器32上连接有位于连通口31中的升降料框33,在机柜30顶部设有位于升降料框33出料口的料盘机械手34,以及料盘机械手34和平移驱动气缸35连接,在机柜30顶部设有用于承载被拉出料盘的料盘承载架36。
32.升降料框33中承载有若干呈上下间隔分布的b件料盘,而升降驱动器32的作用是驱动升降料框33中的b件料盘上升至和平移驱动气缸35移动方向齐平的位置,然后料盘机械手34取得相应高度位置的b件料盘,然后平移驱动气缸35拉出b件料盘,而b件料盘被拉出后则被料盘承载架36承接。
33.料盘机械手34例如是夹趾气缸。也可以是插入料盘的插销配合升降气缸的组合方式。插销插入料盘预留孔中。
34.如图4所述,中转平台4包括机台40,在机台40顶部设有转动盘41,在转动盘41上设有若干呈圆周均匀分布的工件定位治具42,转动盘41与转动驱动机构连接。转动驱动机构为电机通过带传动或者齿轮传动方式和转动盘41连接,实现转动盘41的转动。
35.优选地,本实施例工件定位治具42有四个。转动盘41转动90
°
,使得一个工件定位治具42对应a件机械手5,一个工件定位治具42对应b件机械手6,一个工件定位治具42对应下料机械手7,剩余一个工件定位治具42则处于人工进一步锁附螺丝的人工站立位。
36.进一步地,工件定位治具42包括固定于转动盘41上的固定座420,在固定座420上设有倾斜向下朝外的治具板421,在治具板421的竖向两相对侧边中的其中一侧边设有定位挡块422,在另外一侧边设有能相对定位挡块422平移的移动块423,移动块423与平移驱动器连接,平移驱动器为气缸或者油缸,在治具板421的外表面下侧边设有底部承托块424,在治具板421的下侧设有与治具板421铰接的翻转压块425。
37.以及在治具板421上设有通孔426,在转动盘41上设有对准通孔426的检测传感器427。检测传感器427为商购件,例如,光线传感器,检测是否有料。检测a件是否有放置于治具板421。
38.a件点胶后先固定于治具板421,固定方式为:a件放置于治具板421,a件的下侧边被底部承托块424承托,此时移动块423向定位挡块422侧移动,以使得a件被移动块423和定位挡块422限制。
39.然后从和b件机械手6对应的工位顺时针转动90
°
进入人工站立工位,此时翻转压块425向上翻转使得翻转压块425压紧a件,并进行最终的螺丝锁附固定作业。例如,人工取得螺丝并进行锁附a件和b件。
40.为了确保操作的安全性,在机台40上还设有位于工件定位治具42上方的防护板43,防护板43通过若干连接柱44固定于机台40。
41.优选地,本实施例的a件置放平台1、a件机械手5和中转平台4位于同一直线上并且间隔分布;点胶装置2、b件机械手6和b件置放平台3位于同一直线上并且间隔分布。相当于呈两行分布。
42.a件机械手5用于从a件置放平台1上取得a件并转移释放于点胶装置2上,并且a件机械手5还从点胶装置2点胶处理后的a件取得并转移释放于中转平台4上,b件机械手6用于从b件置放平台3上取得b件并转移置放于中转平台4上的a件上。
43.下料机械手7用于将中转平台4上的组合件取得并转移至中转平台4外。
44.本实施例的工作原理如下:
45.s1、将a件放置于a件置放平台1,将b件放置于b件置放平台3;
46.s2、a件机械手5将a件置放平台1上的a件取得并释放于点胶装置2,点胶后又由a件机械手5取得并转移至中转平台4,此时转动盘41顺时针转动90
°
使得a件对应b件机械手6;
47.s3、b件机械手6将b件取得并置放于中转平台4的a件上,转动盘41顺时针再转动90
°
,进入人工站立工位,进行螺丝锁附。
48.s4、在s3基础上,转动盘41顺时针进一步转动90
°
,使得组合件对应下料机械手7,最后下料机械手7将中转平台4上的组合件取得并转移至中转平台4外。
49.集成的生产线方式,不仅解决了组装效率低的问题,而且还确保了产品组装质量的一致性,确保产品的组装合格率。
50.降低了劳动强度,以及降低了人工成本。
51.本文中所描述的具体实施例仅仅是对本实用新型精神作举例说明。本实用新型所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本实用新型的精神或者超越所附权利要求书所定义的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1