一种具备定位功能的中缝压合机的制作方法
1.本实用新型涉及压合机技术领域,具体为一种具备定位功能的中缝压合机。
背景技术:
2.机械加工是指通过一种机械设备对工件的外形尺寸或性能进行改变的过程,机器的生产过程是指从原材料制成产品的全部过程,对机器生产而言包括原材料的运输和保存,生产的准备,毛坯的制造,零件的加工和热处理,产品的装配、及调试,油漆和包装等内容。
3.在对工件进行压合时,需要使用到压合机,现有的压合机在使用过程中,通常不具有自动下料功能,导致当对工件进行压合完成后,需要人工手动对工件进行拿取收集,从而影响其工作效率,且由于结构单一,不能对待压合的工件进行聚中定位处理,进而降低了中缝压合机的适用性。
技术实现要素:
4.本实用新型的目的在于提供一种具备定位功能的中缝压合机,具备能够对工件进行聚中定位及具有自动下料功能的优点,解决了现有的压合机在使用过程中,通常不具有自动下料功能,导致当对工件进行压合完成后,需要人工手动对工件进行拿取收集,从而影响其工作效率,且由于结构单一,不能对待压合的工件进行聚中定位处理,进而降低了中缝压合机适用性的问题。
5.为实现上述目的,本实用新型提供如下技术方案:一种具备定位功能的中缝压合机,包括箱体,所述箱体顶部的四角均焊接有支杆,所述支杆的顶端焊接有顶板,所述顶板的底部通过螺栓连接有液压杆,所述液压杆的底端通过螺栓连接有压合板,所述箱体顶部的两侧均铆接有定位机构,所述箱体后侧顶部的两侧均开设有凹槽,所述凹槽内腔的前侧通过螺栓连接有下料机构,所述箱体前侧的底部铆接有支板,所述支板的顶部放置有接料盒,所述支杆的前侧通过螺栓连接有控制器。
6.优选的,所述定位机构包括固定板,所述固定板相反的一侧均通过螺栓连接有第一电动推杆,所述第一电动推杆靠近压合板的一端贯穿固定板并固定连接有检测板,所述检测板远离固定板的一侧通过螺栓连接有压力传感器,所述压力传感器远离固定板的一侧通过螺栓连接有定位板,所述控制器的输出端与第一电动推杆单向电连接,所述控制器与压力传感器双向电连接。
7.优选的,所述下料机构包括第二电动推杆,所述第二电动推杆的前侧通过螺栓与凹槽的内壁固定连接,所述第二电动推杆的后端固定连接有活动杆,所述活动杆的顶端焊接有推板,所述推板位于箱体的顶部,所述控制器的输出端与第二电动推杆单向电连接。
8.优选的,所述支板顶部的两侧均铆接有限位板,所述接料盒的两侧均铆接有把手。
9.优选的,所述控制器的输出端与液压杆单向电连接,所述支板底部的两侧均铆接有加强筋,所述加强筋的后侧与箱体铆接。
10.与现有技术相比,本实用新型的有益效果如下:
11.本实用新型通过箱体、支杆、顶板、液压杆、压合板、定位机构、凹槽、下料机构、支板、接料盒、控制器、固定板、第一电动推杆、检测板、压力传感器、定位板、第二电动推杆和活动杆的配合,具备能够对工件进行聚中定位及具有自动下料功能的优点,解决了现有的压合机在使用过程中,通常不具有自动下料功能,导致当对工件进行压合完成后,需要人工手动对工件进行拿取收集,从而影响其工作效率,且由于结构单一,不能对待压合的工件进行聚中定位处理,进而降低了中缝压合机适用性的问题。
附图说明
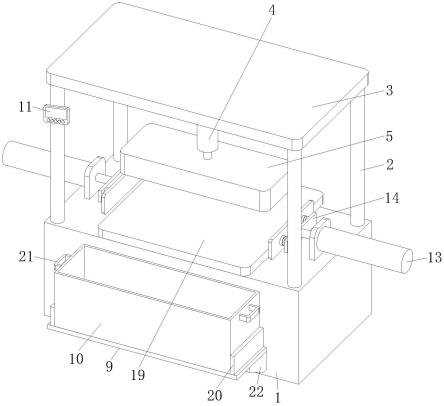
12.图1为本实用新型结构立体图;
13.图2为本实用新型局部结构立体仰视图;
14.图3为本实用新型局部结构立体后视图;
15.图4为本实用新型局部结构立体俯视图。
16.图中:1箱体、2支杆、3顶板、4液压杆、5压合板、6定位机构、7凹槽、8下料机构、9支板、10接料盒、11控制器、12固定板、13第一电动推杆、14检测板、15压力传感器、16定位板、17第二电动推杆、18活动杆、19推板、20限位板、21把手、22加强筋。
具体实施方式
17.请参阅图1-图4,一种具备定位功能的中缝压合机,包括箱体1,箱体1顶部的四角均焊接有支杆2,支杆2的顶端焊接有顶板3,顶板3的底部通过螺栓连接有液压杆4,液压杆4的底端通过螺栓连接有压合板5,通过设置液压杆4和压合板5,能够对工件进行压合处理,箱体1顶部的两侧均铆接有定位机构6,箱体1后侧顶部的两侧均开设有凹槽7,凹槽7内腔的前侧通过螺栓连接有下料机构8,箱体1前侧的底部铆接有支板9,支板9的顶部放置有接料盒10,通过设置支板9和接料盒10,方便对加工完成后的工件进行接取收集,支杆2的前侧通过螺栓连接有控制器11。
18.定位机构6包括固定板12,固定板12相反的一侧均通过螺栓连接有第一电动推杆13,电动推杆又名直线驱动器,主要是由电机推杆和控制装置等机构组成的一种新型直线执行机构,可以认为是旋转电机在结构方面的一种延伸,电动推杆是一种将电动机的旋转运动转变为推杆的直线往复运动的电力驱动装置,可用于各种简单或复杂的工艺流程中做为执行机械使用,以实现远距离控制、集中控制或自动控制,第一电动推杆13靠近压合板5的一端贯穿固定板12并固定连接有检测板14,检测板14远离固定板12的一侧通过螺栓连接有压力传感器15,压力传感器15是能感受压力信号,并能按照一定的规律将压力信号转换成可用的输出的电信号的器件或装置,压力传感器15是工业实践中最为常用的一种传感器,其广泛应用于各种工业自控环境,涉及水利水电、铁路交通、智能建筑、生产自控、航空航天、军工、石化、油井、电力、船舶、机床、管道等众多行业,压力传感器15远离固定板12的一侧通过螺栓连接有定位板16,通过设置第一电动推杆13、检测板14和定位板16,能够对工件进行聚中定位,从而增加后续的压合效果,控制器11的输出端与第一电动推杆13单向电连接,控制器11与压力传感器15双向电连接。
19.下料机构8包括第二电动推杆17,第二电动推杆17的前侧通过螺栓与凹槽7的内壁
固定连接,第二电动推杆17的后端固定连接有活动杆18,通过设置第二电动推杆17和活动杆18,能够对推板19的位置进行前后调节,活动杆18的顶端焊接有推板19,通过设置推板19,能够对加工完成后的工件进行推动处理,推板19位于箱体1的顶部,控制器11的输出端与第二电动推杆17单向电连接。
20.支板9顶部的两侧均铆接有限位板20,通过设置限位板20,能够对接料盒10进行限位,接料盒10的两侧均铆接有把手21,通过设置把手21,方便使用者对接料盒10进行拿取。
21.控制器11的输出端与液压杆4单向电连接,支板9底部的两侧均铆接有加强筋22,加强筋22的后侧与箱体1铆接。
22.使用时,通过控制器11控制第二电动推杆17伸长,第二电动推杆17带动活动杆18向后侧移动,活动杆18带动推板19向后侧移动,然后将需要压合的工件放置在箱体1的顶部,通过控制器11控制第一电动推杆13伸长,第一电动推杆13带动检测板14和压力传感器15移动,压力传感器15带动定位板16移动,在两个定位板16的作用下,能够对工件进行聚中处理,然后控制器11控制第一电动推杆13收缩,第一电动推杆13带动定位板16复位,压合板5对工件进行压合处理,压合完成后,控制器11控制第二电动推杆17收缩,第二电动推杆17带动活动杆18向前侧移动,活动杆18带动推板19向前侧移动,推板19对工件进行推动,工件掉落至接料盒10的内腔,从而完成下料作业。
23.综上所述:该具备定位功能的中缝压合机,通过箱体1、支杆2、顶板3、液压杆4、压合板5、定位机构6、凹槽7、下料机构8、支板9、接料盒10、控制器11、固定板12、第一电动推杆13、检测板14、压力传感器15、定位板16、第二电动推杆17和活动杆18的配合,解决了现有的压合机在使用过程中,通常不具有自动下料功能,导致当对工件进行压合完成后,需要人工手动对工件进行拿取收集,从而影响其工作效率,且由于结构单一,不能对待压合的工件进行聚中定位处理,进而降低了中缝压合机适用性的问题。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1