一种数控车床自动上料装置的制作方法
1.本实用新型涉及上料装置领域,特别涉及一种数控车床自动上料装置。
背景技术:
2.数控车床是使用较为广泛的数控机床之一。它主要用于轴类零件或盘类零件的内外圆柱面、任意锥角的内外圆锥面、复杂回转内外曲面和圆柱、圆锥螺纹等切削加工,并能进行切槽、钻孔、扩孔、铰孔及镗孔等。
3.在数控车床上料时,对于较小的工件上料时,不容易对较小的工件进行定位,使后面对较小工件加工受到影响到。
技术实现要素:
4.本实用新型的目的在于至少解决现有技术中存在的技术问题之一,提供一种数控车床自动上料装置,便于上料时对较小工件进行定位,避免影响到后面工件的加工。
5.本实用新型还提供具有上述一种数控车床自动上料装置,一种数控车床自动上料装置,包括滑轨一:所述滑轨一的上侧设置有定位机构,所述定位机构的前侧设置有上料机构,所述上料机构的外侧设置有夹持机构;
6.所述定位机构包括滑块,所述滑块滑动连接有滑轨一的上侧,所述滑块的上侧固定连接有固定块,所述固定块的上侧滑动连接有滑轨二;
7.所述上料机构包括移动框,所述移动框固定连接在滑轨二,使移动框的左右内侧开设有滑槽一,所述滑槽一的内侧滑动连接有限位块,左右两侧所述限位块之间固定连接有升降板,所述升降板的下侧固定连接有升降块,所述升降块的下侧固定连接有电机一,所述电机一下侧的输出端固定连接有转轴,所述转轴的下端固定连接有转块;
8.所述夹持机构包括夹持板,所述夹持板固定连接在转块的下侧与左侧,所述夹持板的外端开设有滑槽二,所述滑槽二的内部转动连接有双向螺杆,所述滑槽二的内侧滑动连接有两个滑板,所述滑板的外侧固定连接有夹持环,所述夹持板的外侧固定连接有电机二,所述电机二的输出端与双向螺杆螺纹连接。
9.根据所述的一种数控车床自动上料装置,所述滑轨一的后侧固定连接有l形板,所述l形板与滑轨二之间固定连接有电动伸缩杆一。便于控制夹持机构前后移动。
10.根据所述的一种数控车床自动上料装置,所述滑轨一的上侧固定连接有安装块,所述安装块与滑块之间固定连接有电动伸缩杆二。便于控制夹持机构左右移动。
11.根据所述的一种数控车床自动上料装置,所述升降板的后侧固定连接有后板,所述后板与滑轨二之间固定连接有电动伸缩杆三。便于控制升降板上下移动。
12.根据所述的一种数控车床自动上料装置,所述升降块为三角形结构设置。
13.根据所述的一种数控车床自动上料装置,所述转块为三角形结构设置。便于两侧的夹持机构进行更换使用。
14.根据所述的一种数控车床自动上料装置,所述双向螺杆与滑板螺纹连接。便于两
侧的滑板向相反的方向移动。
15.上述方案具有的有益效果:
16.1、通过设置有滑轨一、滑块、固定块、滑轨二、移动框、滑槽一、限位块、升降板、升降块、转块与固定杆,便于对固定杆下侧的吸盘对较小的工件进行定位,避免影响到后面对工件进行放置加工。
17.2、通过设置有滑槽二、滑板、双向螺杆、夹持环、夹持板与电机二,便于对不同直径的工件进行夹持限位,增加装置的适用性。
18.本实用新型的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本实用新型的实践了解到。
附图说明
19.下面结合附图和实施例对本实用新型进一步地说明;
20.图1为本实用新型一种数控车床自动上料装置的整体立体结构图;
21.图2为本实用新型一种数控车床自动上料装置的正视图;
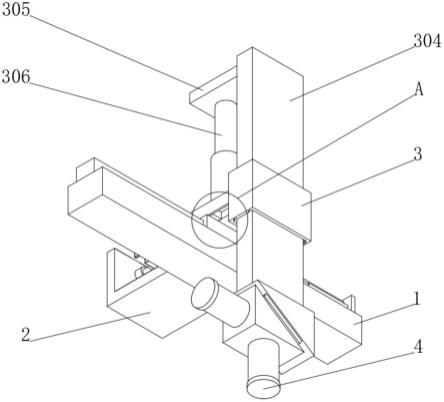
22.图3为图1中a处的放大图;
23.图4为本实用新型一种数控车床自动上料装置的俯视图。
24.图5为本实用新型一种数控车床自动上料装置中夹持机构的仰视图。
25.图例说明:
26.1、滑轨一;2、定位机构;201、滑块;202、固定块;203、滑轨二;204、l形板;205、电动伸缩杆一;206、安装块;207、电动伸缩杆二;3、上料机构;301、移动框;302、滑槽一;303、限位块;304、升降板;305、后板;306、电动伸缩杆三;307、升降块;308、电机一;309、转轴;310、转块;4、夹持机构;401、滑槽二;402、双向螺杆;403、滑板;404、夹持环;405、电机二;406、夹持板。
具体实施方式
27.本部分将详细描述本实用新型的具体实施例,本实用新型之较佳实施例在附图中示出,附图的作用在于用图形补充说明书文字部分的描述,使人能够直观地、形象地理解本实用新型的每个技术特征和整体技术方案,但其不能理解为对本实用新型保护范围的限制。
28.参照图1-5,本实用新型实施例一种数控车床自动上料装置,包括滑轨一1:滑轨一1的上侧设置有定位机构2,定位机构2的前侧设置有上料机构3,上料机构3的外侧设置有夹持机构4,其中电机一308、电机二405、电动伸缩杆一205、电动伸缩杆二207与电动伸缩杆三306均外部电源连接,其中上料过程通过外部plc控制器进行控制。
29.定位机构2包括滑块201,滑块201滑动连接有滑轨一1的上侧,滑块201的上侧固定连接有固定块202,固定块202的上侧滑动连接有滑轨二203,滑轨一1的后侧固定连接有l形板204,l形板204与滑轨二203之间固定连接有电动伸缩杆一205,滑轨一1的上侧固定连接有安装块206,安装块206与滑块201之间固定连接有电动伸缩杆二207,在使用电动伸缩杆一205带动滑轨二203前后移动,滑轨二203带动升降板304下侧夹持机构4前后移动,便于对工件前后方位进行定位,同时电动伸缩杆二207带动滑块201左右移动,滑块201带动升降板
304下侧的夹持机构4左右移动,便于对工件的左右方位进行定位。
30.上料机构3包括移动框301,移动框301固定连接在滑轨二203,使移动框301的左右内侧开设有滑槽一302,滑槽一302的内侧滑动连接有限位块303,左右两侧限位块303之间固定连接有升降板304,升降板304的下侧固定连接有升降块307,升降块307的下侧固定连接有电机一308,电机一308下侧的输出端固定连接有转轴309,转轴309的下端固定连接有转块310,升降板304的后侧固定连接有后板305,后板305与滑轨二203之间固定连接有电动伸缩杆三306,升降块307为三角形结构设置,转块310为三角形结构设置,在使用时,电动伸缩杆三306带动后板305上下移动,后板305带动升降板304上下移动,升降板304带动夹持板406上下移动,对工件上下方位进行定位,在滑槽一302与限位块303的作用,增加升降板304上下移动稳定性,当夹持机构4上好料后,电机一308启动,电机一308带动转轴309转动,转轴309带动转块310转动,使转块310下侧夹持环404上的工件转动到左侧,便于对左侧进行放置。
31.夹持机构4包括夹持板406,夹持板406固定连接在转块310的下侧与左侧,夹持板406的外端开设有滑槽二401,滑槽二401的内部转动连接有双向螺杆402,滑槽二401的内侧滑动连接有两个滑板403,滑板403的外侧固定连接有夹持环404,夹持板406的外侧固定连接有电机二405,电机二405的输出端与双向螺杆402螺纹连接,双向螺杆402与滑板403螺纹连接,在使用时,启动电机二405,电机二405带动双向螺杆402转动,双向螺杆402带动滑板403向相反的方向移动,滑板403带动夹持环404移动,便于对不同直径的工件进行夹持,增加装置的适用性。
32.工作原理:在使用时,电动伸缩杆一205带动夹持环404前后移动,电动伸缩杆二207带动夹持环404左右移动,并通过电动伸缩杆三306控制升降板304上下移动,升降板304带动下侧的夹持环404上下移动,便于对夹持环404进行定位,当定好为时,电机二405启动,电机二405带动两侧的夹持环404夹持住不同直径的工件进行夹持,当需要将工件放置在需要的位置,电机一308启动,电机一308带动转块310转动,转块310带动下侧夹持环404上的工件转动到左侧,便于将工件放置在左侧的位置。
33.上面结合附图对本实用新型实施例作了详细说明,但是本实用新型不限于上述实施例,在所属技术领域普通技术人员所具备的知识范围内,还可以在不脱离本实用新型宗旨的前提下做出各种变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1