一种空心铜棒自动套圈机的制作方法
1.本实用新型涉及铜棒加工技术领域,特别是涉及一种空心铜棒自动套圈机。
背景技术:
2.众所周知,一些设备或组装件需要用到铜棒作为连接件与其他零件连接,其中一些铜棒需要套设铁圈,目前各行业内对于铁圈的套装工作方式参差不齐。有使用手工套的,有使用半自动装置套的,有使用简易工装棒辅助套的,少数有使用自动套圈机的。自动套圈机产品套装完成后之前流出,再由人工对产品进行检查是否套装到位,或者送到检测到进行检查,工序繁琐。比如专利申请公布号cn110002036a的专利公开了一种多功能自动套圈机,包括机箱,所述机箱一侧设有产品集存输送装置,所述机箱内部设有步进输送装置、送圈装置、自动套圈器、扶正装置和下料机构,所述扶正装置设置于步进输送装置后侧,所述自动套圈器设置于扶正装置上方,所述送圈装置设置于自动套圈器和扶正装置之间,所述下料机构设置于自动套圈器一侧且与产品集存输送装置相对应;所述步进输送装置包括滚珠直线导轨和输送工装,所述输送工装滑动卡接于滚珠直线导轨顶部,所述输送工装顶部开设有用于输送待套圈产品的定位卡槽,所述步进输送装置前侧设有多个光电开关;所述送圈装置包括保护环和线性直线导轨一,所述线性直线导轨一设置于保护环内部且两端贯穿保护环,所述线性直线导轨一顶部滑动设有送圈滑块,所述送圈滑块上设有限位送圈槽,所述线性直线导轨一外部套设有检测组件,所述检测组件底端通过支撑板与机箱底部表面固定连接;所述自动套圈器包括直线步进推杆、撑圈锥体、撑圈板、线性直线导轨二、撑圈爪、退圈板、退圈气缸、复位弹簧、安装板、电机安装板和支撑柱。该设备利用步进输送装置、送圈装置、自动套圈器、扶正装置和下料机构相配合自动输送定位待加工产品和o型圈,自动套圈器能够拾取撑开o型圈并自动定位套在待加工产品上,整个装置结构紧凑,套圈精度高,能够实现自动套圈工作,无需人工套圈,大大提高了产品加工效率。
3.上述的多功能自动套圈机,o型圈套装完后直接下料,无法保障每个套装圈套合格,容易导致大量的不良品流出,导致产品的报废。为此,需要设计一台具备检测功能的自动套圈机。
技术实现要素:
4.为了克服现有技术的上述缺陷,本实用新型提供一种空心铜棒自动套圈机,通过在工作台上设置拔插力检测机构和ccd相机检测机构能够检测套圈套设在空心铜棒的拔插的承受力和检测承受力后套圈是否安装到位和变形,不需要人工检测,提高生产产品的良率。
5.为实现上述目的,本实用新型提出:一种空心铜棒自动套圈机,包括:机箱以及设于机箱顶部的工作台,工作台上设有用于平移空心铜棒的平移机构、以及用于撑大套圈并将套圈套设于空心铜棒顶部的套圈撑开机构、以及用于检测套圈套设于空心铜棒后的拔插力的拔插力检测机构、以及用于检测套圈套于空心铜棒是否到位的ccd相机检测机构,套圈
撑开机构设有撑头以及推动撑头上的套圈压装于空心铜棒的推块,机箱顶部还设有用于输送空心铜棒和套圈的空心铜棒输送震动盘和套圈输送震动盘,平移机构与空心铜棒输送震动盘的输送道末端连接,套圈撑开机构位于套圈输送震动盘输送道末端上方。
6.进一步的技术方案为:空心铜棒自动套圈机还包括设于工作台上的移送料道,移送料道的末端下料机构,平移机构、套圈撑开机构、拔插力检测机构和ccd相机检测机构沿移送料道依次布设。
7.进一步的技术方案为:平移机构包括具有x轴导轨的支撑台以及滑设于支撑台上并具有第一y轴导轨的导向座以及滑设于导向座上用于推动空心铜棒沿移送料道移动的双层推送板,双层推送板靠近于移送料道的一端间隔设有与空心铜棒形状一致的卡槽,支撑台和导向座上分别设有推动导向座和双层推送板移动的第一推动件和第二推动件。
8.进一步的技术方案为:导向座还设有限位机构,限位机构包括固定于导向座上并具有第二y轴导轨的安装板,安装板滑设有末端具有与空心铜棒形状一致的限位槽的限位推杆,安装板设有推动限位推杆朝空心铜棒移动的第三推动件,限位推杆位于双层推送板的上方。
9.进一步的技术方案为:套圈撑开机构包括具有第三y轴导轨的支撑架以及滑设于支撑架上并具有第一z轴导轨的l型滑座,l型滑座滑设有滑板,支撑架和l型滑座分别设有推动l型滑座和滑板移动的第四推动件和第五推动件;
10.滑板上水平设有安装块,撑头安装于安装块,滑板上侧设有与安装块平行的连接板,连接板设有输出端朝安装块伸缩的伸缩气缸;
11.伸缩气缸的输出端连接有可滑动穿过安装块的滑杆,推块设于滑杆的底部,且撑头穿过推块。
12.进一步的技术方案为:拔插力检测机构包括具有第二z轴导轨的竖板,竖板滑设有滑块,竖板顶部设有输出端具有推板的第六推动件,推板的两侧设有与滑块连接的推动杆,由第六推动件推动推板带动滑块沿第二z轴导轨上下移动,滑块设有压力传感器,压力传感器上设有插入空心铜棒的插针。
13.进一步的技术方案为:竖板下侧设有固定组件,固定组件包括固定于竖板后侧并水平设置的第七推动件,第七推动件的输出端设有穿过竖板并与竖板滑动配合的固定顶针,固定顶针的末端开设有与空心铜棒形状一致的固定槽。
14.进一步的技术方案为:ccd相机检测机构包括用于收集套圈套于空心铜棒信息的ccd相机以及设于ccd相机下侧的光源。
15.进一步的技术方案为:空心铜棒自动套圈机还包括用于控制平移机构、套圈撑开机构、拔插力检测机构、ccd相机检测机构、空心铜棒输送震动盘和套圈输送震动盘的plc控制器。
16.本实用新型与现有技术相比较,本实用新型的实施效果如下:通过设置平移机构和套圈撑开机构,同时设置用于输送空心铜棒和套圈的空心铜棒输送震动盘和套圈输送震动盘,可实现自动化装配,不需要人工上料、送料,其有效降低了劳动强度,节约了人力成本,并提高了生产效率;并通过在工作台上设置拔插力检测机构和ccd相机检测机构能够检测套圈套设在空心铜棒上的拔插的承受力和检测承受力后套圈是否安装到位和变形,不需要人工检测,提高生产产品的良率,减少不良品流入市场。
附图说明
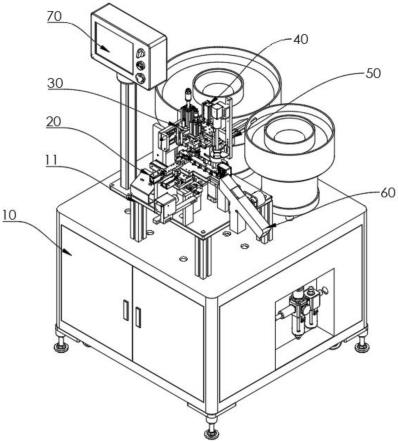
17.图1为本实用新型的一视角的结构示意图;
18.图2为本实用新型的另一视角的结构示意图;
19.图3为本实用新型中平移机构的结构示意图;
20.图4为图2中a部分的放大结构示意图;
21.图5为本实用新型中套圈撑开机构的结构示意图;
22.图6本实用新型中拔插力检测机构的结构示意图。
具体实施方式
23.为使本实用新型的上述目的、特征和优点能够更加明显易懂,下面结合附图对本实用新型的具体实施方式做详细的说明。在下面的描述中阐述了很多具体细节以便于充分理解本实用新型。但是本实用新型能够以很多不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本实用新型内涵的情况下做类似改进,因此本实用新型不受下面公开的具体实施例的限制。
24.请参阅图1、图2,本实施例提供一种空心铜棒自动套圈机,包括:机箱10以及设于机箱10顶部的工作台11,工作台11上设有用于平移空心铜棒的平移机构20、以及用于撑大套圈并将套圈套设于空心铜棒顶部的套圈撑开机构30、以及用于检测套圈套设于空心铜棒后的拔插力的拔插力检测机构40、以及用于检测套圈套于空心铜棒是否到位的ccd相机检测机构50,套圈撑开机构30设有撑头31以及推动撑头31上的套圈压装于空心铜棒的推块32,机箱10顶部还设有用于输送空心铜棒和套圈的空心铜棒输送震动盘12和套圈输送震动盘13,平移机构20与空心铜棒输送震动盘12的输送道末端连接,套圈撑开机构30位于套圈输送震动盘13输送道末端上方;此外在工作台11上还设有移送料道,移送料道的末端设有下料机构60,平移机构20、套圈撑开机构30、拔插力检测机构40和ccd相机检测机构50沿移送料道依次布设,在机箱10上设有用于控制平移机构20、套圈撑开机构30、拔插力检测机构40、ccd相机检测机构50、空心铜棒输送震动盘12和套圈输送震动盘13的plc控制器70,ccd相机检测机构50将检测信号反馈至plc控制器70,由plc控制器70进行判断套圈套设在空心铜棒后,进行压力检测,判断是否套圈位移或变形,减少不良品的流出,提高生产产品的良率。
25.工作时,空心铜棒输送震动盘12和套圈输送震动盘13同时输送空心铜棒和套圈,当空心铜棒和套圈移动至输送道末端时,由输送道末端的感应器感应到工件后,将信号反馈至plc控制器70,由plc控制器70控制平移机构20将空心铜棒沿移送料道移送至套圈撑开机构30下方;此时,plc控制器70控制套圈撑开机构30的撑头31下移插入至套圈输送震动盘13输送道上的套圈内,再由套圈撑开机构30将套圈移动至空心铜棒,并将撑头31插入到空心铜棒内,再由套圈撑开机构30推动推块32将套圈套设于空心铜棒顶部,完成套装后,再由平移机构20将工件移送至拔插力检测机构40,由拔插力检测机构40检测套圈套设于空心铜棒后的拔插力,在移送至ccd相机检测机构50,由ccd相机检测机构50进行拍照,ccd相机检测机构50将照片信息反馈至plc控制器70,由plc控制器70进行判断套圈套设在空心铜棒后,进行压力检测,判断是否套圈位移或变形,完成检测后,再由平移机构20将成品移送至下料机构60,由下料机构60流出,此外,在下料机构60设有不良品流出口,在不良品流出口
设有翻转板,并在下料机构60上设置哟驱动翻转板翻转,使不良品通过不良品流出口流出,并阻挡良品流出口。本实用新型通过设置平移机构20和套圈撑开机构30,同时设置用于输送空心铜棒和套圈的空心铜棒输送震动盘12和套圈输送震动盘13,可实现自动化装配,不需要人工上料、送料,其有效降低了劳动强度,节约了人力成本,并提高了生产效率;并通过在工作台11上设置拔插力检测机构40和ccd相机检测机构50能够检测套圈套设在空心铜棒上的拔插的承受力和检测承受力后套圈是否安装到位和变形,不需要人工检测,提高生产产品的良率,减少不良品流入市场。
26.具体的,请参阅图3,平移机构20包括具有x轴导轨的支撑台21以及滑设于支撑台21上并具有第一y轴导轨的导向座22以及滑设于导向座22上用于推动空心铜棒沿移送料道移动的双层推送板23,双层推送板23靠近于移送料道的一端间隔设有与空心铜棒形状一致的卡槽230,支撑台21和导向座22上分别设有推动导向座22和双层推送板23移动的第一推动件24和第二推动件25,由第二推动件25推动双层推送板23沿第一y轴导轨方向朝空心铜棒输送震动盘12的输送道末端移动,使空心铜棒卡于卡槽230内,再由第一推动件24推动导向座22带动双层推送板23带动空心铜棒沿移送料道移动至套圈撑开机构30下方,不需要人工送料,提高设备的工作效率。
27.优选的,请参阅图4,导向座22还设有限位机构,限位机构包括固定于导向座22上并具有第二y轴导轨的安装板26,安装板26滑设有末端具有与空心铜棒形状一致的限位槽的限位推杆28,安装板26设有推动限位推杆28朝空心铜棒移动的第三推动件27,限位推杆28位于双层推送板23的上方,此外,在套圈输送震动盘13输送道末端设有与限位槽配合固定空心铜棒的限位固定槽,当双层推送板23带动空心铜棒移动至下方后,第三推动件27推动限位推杆28朝空心铜棒移动,由限位槽将空心铜棒固定于移送料道内,防止撑头31插入空心铜棒,发生偏移,可以有效的保护工件和撑头31不被碰坏,同时能够使得撑头31精确快速的插入到空心铜棒内。
28.具体的,请参阅图5,套圈撑开机构30包括具有第三y轴导轨的支撑架33以及滑设于支撑架33上并具有第一z轴导轨的l型滑座34,l型滑座34滑设有滑板35,支撑架33和l型滑座34分别设有推动l型滑座34和滑板35移动的第四推动件36和第五推动件37;滑板35上水平设有安装块38,撑头31安装于安装块38,滑板35上侧设有与安装块38平行的连接板,连接板设有输出端朝安装块38伸缩的伸缩气缸39;伸缩气缸39的输出端连接有可滑动穿过安装块38的滑杆,推块32设于滑杆的底部,且撑头31穿过推块32;由第五推动件37推动l型滑座34沿第一z轴导轨下移,使撑头31插入至套圈输送震动盘13输送道上的套圈内,使其撑大套圈,后,第五推动件37带动插有套圈的撑头31复位,此时,第四推动件36推动撑头31移动至空心铜棒的下方,再由第五推动件37推动撑头31下移,使撑头31插入至空心铜棒内,防止空心铜棒移动,此时,伸缩气缸39启动,推动推块32将撑头31上的套圈套设在空心铜棒上,由伸缩气缸39驱动推块32将撑头31上的套圈套设在空心铜棒,不需要人工操作,其有效降低了劳动强度,节约了人力成本,并提高了生产效率。
29.进一步的,请参阅图2和图6,拔插力检测机构40包括具有第二z轴导轨的竖板41,竖板41滑设有滑块42,竖板41顶部设有输出端具有推板的第六推动件43,推板的两侧设有与滑块42连接的推动杆44,由第六推动件43推动推板带动滑块42沿第二z轴导轨上下移动,滑块42设有压力传感器45,压力传感器45上设有插入空心铜棒的插针46,完成套圈后,驱动
双层推送板23将工件移送至插针46下方,由第六推动件43推动推板带动滑块42沿第二z轴导轨上移动,使插针46插入至空心铜棒内,直到达到设定的压力值后,由压力传感器45将信号反馈至plc控制器70;完成压力检测后,再驱动双层推送板23将工件移送至ccd相机检测机构50,ccd相机检测机构50包括用于收集套圈套于空心铜棒信息的ccd相机51以及设于ccd相机51下侧的光源52,由ccd相机51拍照,并将照片信息反馈至plc控制器70,由plc控制器70进行判断是否安装到位或是空心铜棒和套圈否变形;通过在工作台11上设置拔插力检测机构40和ccd相机检测机构50能够检测套圈套设在空心铜棒上的拔插的承受力和检测承受力后套圈是否安装到位和变形,不需要人工检测,提高生产产品的良率,减少不良品流入市场。
30.优选的,竖板41下侧设有固定组件,固定组件包括固定于竖板后侧并水平设置的第七推动件47,第七推动件47的输出端设有穿过竖板并与竖板滑动配合的固定顶针48,固定顶针48的末端开设有与空心铜棒形状一致的固定槽480,通过固定组件可以防止检测压力时,空心铜棒移动,提高检测的精确性。
31.需要说说明的是,在本实施例中,第一推动件24、第二推动件25、第三推动件27、第四推动件36、第五推动件37、第六推动件43和七推动件47采用推动气缸,在其他实施例中,第一推动件24、第二推动件25、第三推动件27、第四推动件36、第五推动件37、第六推动件43和七推动件47可以采用其他缸体,或电机等推动器件。
32.空心铜棒自动套圈机的工作原理为:
33.空心铜棒输送震动盘12和套圈输送震动盘13同时输送空心铜棒和套圈,当空心铜棒和套圈移动至输送道末端时,由输送道末端的感应器感应到工件后,将信号反馈至plc控制器70,平移机构20上的第二推动件25推动双层推送板23沿第一y轴导轨方向朝空心铜棒输送震动盘12的输送道末端移动,使空心铜棒卡于卡槽230内,再由第一推动件24推动导向座22带动双层推送板23带动空心铜棒沿移送料道移动至套圈撑开机构30下方;双层推送板23带动空心铜棒移动至下方后,第三推动件27推动限位推杆28朝空心铜棒移动,由限位槽将空心铜棒固定于移送料道内;由第五推动件37推动l型滑座34沿第一z轴导轨下移,使撑头31插入至套圈输送震动盘13输送道上的套圈内,使其撑大套圈,后,第五推动件37带动插有套圈的撑头31复位,此时,第四推动件36推动撑头31移动至空心铜棒的下方,再由第五推动件37推动撑头31下移,使撑头31插入至空心铜棒内,防止空心铜棒移动,此时,伸缩气缸39启动,推动推块32将撑头31上的套圈套设在空心铜棒上,由伸缩气缸39驱动推块32将撑头31上的套圈套设在空心铜棒;完成套圈后,驱动双层推送板23将工件移送至插针46下方,由第六推动件43推动推板带动滑块42沿第二z轴导轨上移动,使插针46插入至空心铜棒内,直到达到设定的压力值后,由压力传感器45将信号反馈至plc控制器70;完成压力检测后,再驱动双层推送板23将工件移送至ccd相机检测机构50,由ccd相机51拍照,并将照片信息反馈至plc控制器70,由plc控制器70进行判断是否安装到位或是空心铜棒和套圈否变形,检测完成后,再由双层推送板23将成品推至下料机构60,下料机构60流出。
34.以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1