一种穿刺器焊接机构的制作方法
1.本实用新型涉及穿刺器生产技术领域,特别涉及一种穿刺器焊接机构。
背景技术:
2.穿刺器是在腹腔镜手术经常使用的一种手术器械,在进行手术操作时,先将腹腔镜穿刺器,穿刺于定点的手术部位,可根据手术器械来选择穿刺器直径的大小,常用的有5毫米10毫米,手术器械通过穿刺器再进入人体的腹腔进行手术操作。穿刺器有气密性保护套,能够有效的防止气体泄漏,保证了气压的稳定性,使手术能顺利完成。
3.而穿刺器在生产过程中,其各部分零件穿刺芯组件、锁紧扣、定位块、卡钩、穿刺椎盖帽需要焊接在一起,人工上料装配效率低下而且有一定的误差率。
技术实现要素:
4.本实用新型解决了相关技术中人工上料装配效率低下而且有一定的误差率的问题,提出一种穿刺器焊接机构,省去了大量的人工成本并提高了工作效率,同时避免了人工装配中存在的误差,提高合格率。
5.为了解决上述技术问题,本实用新型是通过以下技术方案实现的:一种穿刺器焊接机构,包括转盘、控制组件和逆时针方向依次设置于转盘外侧的穿刺芯组件上料工位、锁紧扣上料工位、定位块上料工位、卡钩上料工位、穿刺椎盖帽上料工位、压料工位、焊接工位和下料工位;所述转盘由分割器驱动;所述穿刺芯组件上料工位、锁紧扣上料工位、定位块上料工位、卡钩上料工位、穿刺椎盖帽上料工位上均设置有上料机构和直震送料机;所述压料工位上设置有压紧气缸,所述焊接工位设置有焊接机,所述下料工位的下方设置有传感器,所述控制组件与分割器、上料机构、直震送料机、传感器电连接。
6.作为优选方案,所述上料机构包括x轴直线运动组件、y轴直线运动组件和气动手指,所述气动手指滑动安装于y轴直线运动组件上,所述y轴直线运动组件滑动安装于x轴直线运动组件上。
7.作为优选方案,所述x轴直线运动组件包括x轴气缸、x轴滑轨和x轴气缸万向浮动接头,所述x轴气缸通过x轴气缸安装板安装于底板上,所述x轴滑轨设置于底板上,所述底板的两端均设置有限位板,所述限位板上安装有油压缓冲器,所述x轴气缸万向浮动接头安装于夹爪底板上正对x轴气缸的位置,所述夹爪底板通过x轴滑块安装于x轴滑轨上。
8.作为优选方案,所述y轴直线运动组件包括y轴气缸、y轴滑轨和y轴气缸万向浮动接头,所述y轴气缸通过y轴气缸安装板安装于夹爪底板上,所述y轴滑轨设置于夹爪底板上,所述y轴滑轨上通过滑块安装有夹爪安装板,所述y轴气缸万向浮动接头安装于夹爪安装板上正对y轴气缸的位置,所述夹爪安装板上安装有气动手指,所述气动手指的端部安装有夹爪。
9.作为优选方案,对于卡钩上料工位,所述气动手指替换为气缸,所述气缸的驱动端设置有尼龙压块,所述夹爪安装板底部安装有不锈钢套。
10.作为优选方案,所述压紧气缸安装于气缸安装支架上且压紧气缸的驱动端设置有压紧柱。
11.作为优选方案,所述焊接机通过立柱支撑。
12.作为优选方案,所述转盘上正对的各个工位的位置设置有用于放置零件的模板。
13.与现有技术相比,本实用新型的有益效果是:本实用新型在锁紧扣上料工位、定位块上料工位、卡钩上料工位、穿刺椎盖帽上料工位均通过上料机构和直震送料机配合将各零件到模板上的相应位置,只有穿刺芯组件上料工位和下料工位需要人工,省去了大量的人工成本并提高了工作效率,同时避免了人工装配中存在的误差,提高合格率;下料位的下方设置有传感器,用于检测焊接好的穿刺器是否取走。
附图说明
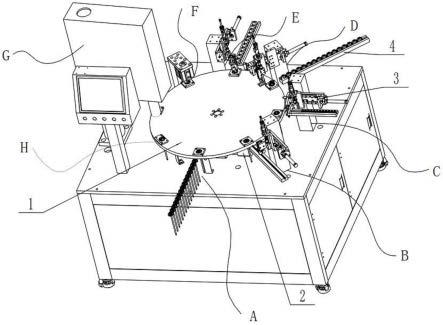
14.图1是本实用新型的整体结构示意图;
15.图2是本实用新型锁紧扣上料工位、定位块上料工位中上料机构的结构示意图;
16.图3是本实用新型卡钩上料工位中上料机构的结构示意图;
17.图4是本实用新型穿刺椎盖帽上料工位中上料机构的结构示意图;
18.图5是本实用新型压紧气缸的结构示意图;
19.图6是本实用新型模板的结构示意图。
20.图中:
21.1、转盘,2、分割器,3、上料机构,301、x轴气缸,302、 x轴滑轨,303、x轴气缸万向浮动接头,304、限位板,305、油压缓冲器,306、x轴气缸安装板,307、底板,308、夹爪底板, 309、y轴气缸,310、y轴滑轨,311、y轴气缸万向浮动接头, 312、夹爪安装板,313、气动手指,314、气缸,315、尼龙压块, 316、不锈钢套,4、直震送料机,5、压紧气缸,501、气缸安装支架,502、压紧柱,6、焊接机,601、立柱,7、模板;
22.a、穿刺芯组件上料工位,b、锁紧扣上料工位,c、定位块上料工位,d、卡钩上料工位,e、穿刺椎盖帽上料工位,f、压料工位,g、焊接工位,h、下料工位。
具体实施方式
23.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。以下对至少一个示例性实施例的描述实际上仅仅是说明性的,决不作为对本实用新型及其应用或使用的任何限制。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
24.需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本技术的示例性实施方式。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、操作、器件、组件和/或它们的组合。
25.除非另外具体说明,否则在这些实施例中阐述的部件和步骤的相对布置、数字表达式和数值不限制本实用新型的范围。同时,应当明白,为了便于描述,附图中所示出的各个部分的尺寸并不是按照实际的比例关系绘制的。对于相关领域普通技术人员已知的技
术、方法和设备可能不作详细讨论,但在适当情况下,所述技术、方法和设备应当被视为授权说明书的一部分。在这里示出和讨论的所有示例中,任何具体值应被解释为仅仅是示例性的,而不是作为限制。因此,示例性实施例的其它示例可以具有不同的值。应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步讨论。
26.在本实用新型的描述中,需要理解的是,方位词如“前、后、上、下、左、右”、“横向、竖向、垂直、水平”和“顶、底”等所指示的方位或位置关系通常是基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,在未作相反说明的情况下,这些方位词并不指示和暗示所指的装置或元件必须具有特定的方位或者以特定的方位构造和操作,因此不能理解为对本实用新型保护范围的限制;方位词“内、外”是指相对于各部件本身的轮廓的内外。
27.为了便于描述,在这里可以使用空间相对术语,如“在
……
之上”、“在
……
上方”、“在
……
上表面”、“上面的”等,用来描述如在图中所示的一个器件或特征与其他器件或特征的空间位置关系。应当理解的是,空间相对术语旨在包含除了器件在图中所描述的方位之外的在使用或操作中的不同方位。例如,如果附图中的器件被倒置,则描述为“在其他器件或构造上方”或“在其他器件或构造之上”的器件之后将被定位为“在其他器件或构造下方”或“在其他器件或构造之下”。因而,示例性术语“在
……
上方”可以包括“在
……
上方”和“在
……
下方”两种方位。该器件也可以其他不同方式定位(旋转 90度或处于其他方位),并且对这里所使用的空间相对描述作出相应解释。
28.此外,需要说明的是,使用“第一”、“第二”等词语来限定零部件,仅仅是为了便于对相应零部件进行区别,如没有另行声明,上述词语并没有特殊含义,因此不能理解为对本实用新型保护范围的限制。
29.如图1至6所示,一种穿刺器焊接机构,包括转盘1、控制组件和逆时针方向依次设置于转盘1外侧的穿刺芯组件上料工位a、锁紧扣上料工位b、定位块上料工位c、卡钩上料工位d、穿刺椎盖帽上料工位e、压料工位f、焊接工位g和下料工位h;转盘 1由分割器2驱动从而逆时针转动,每转动一个工位就会停留几秒,以便于上料;穿刺芯组件上料工位a、锁紧扣上料工位b、定位块上料工位c、卡钩上料工位d、穿刺椎盖帽上料工位e上均设置有上料机构3和直震送料机4,通过上料机构3和直震送料机4配合将各零件放到转盘1上;压料工位f上设置有压紧气缸5,用于各零件的压紧;焊接工位g设置有焊接机6,用于各零件的焊接,下料工位h的下方设置有传感器,用于检测焊接完成后的穿刺器是否拿走;控制组件与分割器2、上料机构3、直震送料机4、传感器电连接。
30.其中,直震送料机4属于现有技术,在此不再赘述其结构及其工作原理。
31.在一个实施例中,上料机构3包括x轴直线运动组件、y轴直线运动组件和气动手指313,气动手指313滑动安装于y轴直线运动组件上,所述y轴直线运动组件滑动安装于x轴直线运动组件上,则气动手指313在x轴直线运动组件、y轴直线运动组件的作用下实现x轴和y轴方向的移动,从而实现零件的抓取。
32.在一个实施例中,x轴直线运动组件包括x轴气缸301、x轴滑轨302和x轴气缸万向浮动接头303,x轴气缸301通过x轴气缸安装板306安装于底板307上,x轴滑轨302设置于底板307上,底板307的两端均设置有限位板304,其中靠近x轴气缸安装板 306的限位板304上
开设有让位孔,供x轴气缸301的活塞杆穿过;限位板304上安装有油压缓冲器305,油压缓冲器305可以减少震动以及噪声;x轴气缸万向浮动接头303安装于夹爪底板308上正对x轴气缸301的位置,x轴气缸万向浮动接头303可以减少误差;夹爪底板308通过x轴滑块安装于x轴滑轨302上。
33.在一个实施例中,y轴直线运动组件包括y轴气缸309、y轴滑轨310和y轴气缸万向浮动接头311,y轴气缸309通过y轴气缸安装板安装于夹爪底板308上,y轴滑轨310设置于夹爪底板 308上,y轴滑轨310上通过滑块安装有l形的夹爪安装板312, y轴气缸万向浮动接头311安装于夹爪安装板312上正对y轴气缸 309的位置,夹爪安装板312上安装有气动手指313,气动手指 313的手指上通过螺栓安装有夹爪,其中,锁紧扣上料工位b、定位块上料工位c上的夹爪为两个相对的l形块;穿刺椎盖帽上料工位e上的夹爪的其中一侧形成凹槽形结构,另一侧形成斜边结构,从而有利于穿刺椎盖帽的夹取。
34.在一个实施例中,对于卡钩上料工位d,气动手指313替换为气缸314,气缸314的驱动端设置有尼龙压块315,夹爪安装板 312底部安装有l形的不锈钢套316,其中,不锈钢套316的横向板上开设有十字形的孔,用于放置卡钩,卡钩两侧均有一排凸起,十字形的孔正好可以卡在两个凸起中间,到达正确位置后,气缸 314驱动尼龙压块315将卡钩卸下。
35.在一个实施例中,压紧气缸5安装于气缸安装支架上501且压紧气缸5的驱动端设置有压紧柱502。
36.在一个实施例中,焊接机6通过立柱601支撑。
37.在一个实施例中,转盘1上正对的各个工位的位置通过螺栓安装有用于放置零件的模板7,模板7上开设有一个圆形凹槽,圆形凹槽的中心开设有圆形孔,则穿刺芯组件中的穿刺芯可以自圆形孔中穿过,圆形孔的两侧为矩形孔,则卡钩的两端可以自矩形孔中穿过。
38.工作原理如下:
39.在穿刺芯组件上料工位a,将穿刺芯组件放置在转盘1上的模板7上,转盘1在分割器2的驱动下逆时针转动一个工位,进入锁紧扣上料工位b,通过上料机构3和直震送料机4配合将锁紧扣放到模板7上的相应位置,转盘1在分割器2的驱动下逆时针转动一个工位,进入定位块上料工位c,通过上料机构3和直震送料机 4配合将定位块放到模板7上的相应位置,转盘1在分割器2的驱动下逆时针转动一个工位,进入卡钩上料工位d,通过上料机构 3和直震送料机4配合将卡钩放到模板7上的相应位置,转盘1在分割器2的驱动下逆时针转动一个工位,进入穿刺椎盖帽上料工位 e,通过上料机构3和直震送料机4配合将穿刺椎盖帽放到模板7上的相应位置,转盘1在分割器2的驱动下逆时针转动一个工位,进入压料工位f,压紧气缸5工作,使得压紧柱502压紧各个零件;转盘1在分割器2的驱动下逆时针转动一个工位,进入焊接工位 g,焊接机6将各个零件焊接在一起,转盘1在分割器2的驱动下逆时针转动一个工位,进入下料工位h,传感器检测到焊接好的穿刺器拿走后,转盘1继续转动;如果焊接好的穿刺器没有拿走,则转盘1不会转动。
40.以上为本实用新型较佳的实施方式,本实用新型所属领域的技术人员还能够对上述实施方式进行变更和修改,因此,本实用新型并不局限于上述的具体实施方式,凡是本领域技术人员在本实用新型的基础上所作的任何显而易见的改进、替换或变型均属于本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1