一种天线自动装夹构造的制作方法
1.本实用新型涉及路由器天线组装技术领域,尤其涉及一种天线自动装夹构造。
背景技术:
2.路由器是连接两个或多个网络的硬件设备,在网络间起网关的作用,是读取每一个数据包中的地址然后决定如何传送的专用智能性的网络设备。
3.为了增加路由器辐射的方向,现在的路由器都包括多根天线,在组装路由器时需将多根天线的馈线经路由器外壳的天线插口插入到路由器外壳内,便于天线与路由器连接,人工插接天线是一种常用的组装方法,但人工插接天线存在质量不统一的问题,不利于控制组装质量,因此有待改进。
技术实现要素:
4.本实用新型的目的在于针对现有的人工插接天线存在质量不统一的不足,提供一种天线自动装夹构造,通过将天线夹持于夹装旋转模块中,天线的插接端与路由器外壳的天线插口对应,理线模块将馈线理直并承托,第一驱动器驱动夹装旋转模块朝固定位方向靠近,使馈线从路由器外壳的天线插口插入路由器外壳内,天线的插接端与路由器外壳的天线插口连接,实现机械化的将天线组装于路由器外壳,确保组装质量的统一性,便于对组装质量的控制,同时也减轻工人工作量,提高了组装效率。
5.为实现上述目的,本实用新型的一种天线自动装夹构造,包括机台,所述机台上设置有用于固定路由器外壳的固定台,所述固定台设置有固定位,路由器外壳的天线插口与固定位同轴设置,所述机台远离所述固定台的一端设置有第一驱动器,所述第一驱动器的输出端设置有用于夹持天线的夹装旋转模块,所述夹装旋转模块的输出端朝向所述固定位,所述夹装旋转模块和所述固定台之间设置有用于将馈线理直的理线模块,所述理线模块的固定端与所述机台滑动连接,所述固定位、所述理线模块的进料端、所述理线模块的出料端以及所述夹装旋转模块的输出端匀同轴设置。
6.优选的,所述理线模块包括承托机构、牵引机构和所述驱动所述承托机构和所述牵引机构移动的第二驱动器,所述第二驱动器固定端与所述机台固定连接;
7.所述承托机构包括第一机械手,所述第一机械手的固定端与所述第二驱动器的输出端连接,所述第一机械手夹持端朝向固定位的一侧设置有两相对设置的承托件,所述第一机械手包括左夹持端和右夹持端,两所述承托件分别固定于所述第一机械手的左夹持端和右夹持端;
8.所述牵引机构设置于所述第一机械手夹持端朝向所述夹装旋转模块的一侧,所述牵引机构包括动力轮、从动轮以及驱动所述动力轮和所述从动轮转动的第三驱动器,所述第一机械手的左夹持端设置有左固定件,所述第一机械手的右夹持端设置有右固定件,所述第三驱动器的固定端与所述右固定件固定,所述第三驱动器的输出端与所述动力轮固定连接,所述从动轮与所述左固定件转动连接,所述动力轮与所述从动轮相对设置。
9.优选的,所述承托件包括第一承托件和第二承托件,所述第一承托件与第一机械手的左夹持端固定连接,所述第二承托件与第一机械手的右夹持端固定连接,所述第一承托件和所述第二承托件相对的错位设置,所述第一承托件和所述第二承托件相对的端面均设置有用于夹持天线的第一凹槽,所述第二承托件对应所述第一承托件的一侧设置有限位抵接块;
10.所述动力轮为直齿轮,所述从动轮周向设置有线槽。
11.优选的,所述夹装旋转模块包括与所述第一驱动器的输出端固定的固定座、固定于所述固定座的第四驱动器和设置于所述第四驱动器输出端的第二机械手,所述第二机械手的夹持端朝向所述固定位,所述第二机械手的夹持端设置有夹持块。
12.优选的,所述夹装旋转模块和所述理线模块之间设置有扶正夹紧模块,所述扶正夹紧模块包括与所述固定座滑动连接的缓冲支架和固定于所述缓冲支架端部的第三机械手,所述第三机械手的两自由端分别设置有夹爪,所述夹爪的固定端分别与所述第三机械手的两自由端固定连接,所述夹爪的自由端设置有用于夹紧天线的第二凹槽,所述第二凹槽相对设置;
13.所述固定台对应所述缓冲支架的位置设置有限位抵接件。
14.优选的,所述缓冲支架包括与所述固定座固定连接的滑动座、滑动于所述滑动座和所述固定座的滑杆以及固定于所述滑杆远离所述固定座一端的抵接板,所述抵接板与所述第三机械手的固定端连接,所述滑杆上设置有缓冲件,所述缓冲件抵于所述滑动座与所述抵接板之间,所述滑杆靠近所述固定座的一端设置有限位块。
15.优选的,所述限位抵接件包括与所述固定台固定的限位座和与所述限位座连接的抵接杆,所述限位座设置有调整槽,所述调整槽的开口端设置有用于缩小所述调整槽的开口端间距的紧固件。
16.优选的,所述夹爪的一侧设置有用于检测天线位置的位置感应器,所述固定座对应所述位置感应器设置有侧支架,所述位置感应器与所述侧支架固定连接。
17.优选的,所述第一驱动器包括行程控制模块,所述行程控制模块包括固定于所述第一驱动器固定端的两行程感应器和与所述第一驱动器输出端连接的行程触发件,所述行程触发件滑动于两所述行程感应器之间。
18.优选的,所述第一驱动器固定端的一侧设置有调整滑槽,所述行程感应器固定于所述调整滑槽内,所述行程感应器与所述调整滑槽连接的一端设置有滑动块,所述滑动块与所述调整滑槽连接。
19.本实用新型的有益效果:本实用新型通过将天线夹持于夹装旋转模块中,天线的插接端与路由器外壳的天线插口对应,理线模块将馈线理直并承托于固定位和夹装旋转模块之间,第一驱动器的输出端驱动夹装旋转模块朝固定位方向靠近,使馈线从路由器外壳的天线插口插入路由器外壳内,最终天线的插接端与路由器外壳的天线插口连接,实现机械化的将天线组装于路由器外壳,确保组装质量的统一性,便于对组装质量的控制,同时也减轻工人工作量,提高了组装效率。
附图说明
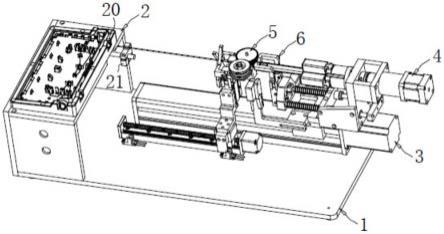
20.图1为本实用新型的结构示意图。
21.图2为本实用新型的理线模块的结构示意图。
22.图3为本实用新型的第一驱动器、夹装旋转模块和扶正夹紧模块的结构示意图。
23.图4为本实用新型的固定台的结构示意图。
24.附图标记包括:
25.1、机台;2、固定台;20、固定位;21、限位抵接件;211、限位座;212、抵接杆;213、调整槽;214、紧固件;3、第一驱动器;31、行程控制模块;32、行程感应器;33、行程触发件;34、调整滑槽;35、滑动块;4、夹装旋转模块;41、固定座;42、第四驱动器;43、第二机械手;44、夹持块;45、侧支架;5、理线模块;51、承托机构;511、第一机械手;512、承托件;513、左固定件;514、右固定件;515、第一承托件;516、第二承托件;517、第一凹槽;518、限位抵接块;52、牵引机构;521、动力轮;522、从动轮;523、第三驱动器;524、线槽;53、第二驱动器;6、扶正夹紧模块;61、缓冲支架;611、滑动座;612、滑杆;613、抵接板;614、缓冲件;615、限位块;62、第三机械手;63、夹爪;64、第二凹槽;7、位置感应器。
具体实施方式
26.以下结合附图对本实用新型进行详细的描述。
27.如图1至图4所示,本实用新型的一种天线自动装夹构造,包括机台1,机台1上设置有用于固定路由器外壳的固定台2,固定台2设置有固定位20,路由器外壳的天线插口与固定位20同轴设置,便于天线通过固定位20与路由器外壳连接。机台1远离固定台2的一端设置有第一驱动器3,第一驱动器3为线性模组、直角坐标机器人或者直线滑台。第一驱动器3的输出端设置有用于夹持天线的夹装旋转模块4,使夹装旋转模块4随第一驱动器3的输出端移动而位移。夹装旋转模块4的输出端朝向固定位20,使夹持于夹装旋转模块4输出端的天线的插接端朝向路由器外壳的天线插口。夹装旋转模块4和固定台2之间设置有用于将馈线理直的理线模块5,通过理线模块5将馈线理直,便于馈线插入路由器外壳内。理线模块5的固定端与机台1滑动连接,使理线模块5滑动于夹装旋转模块4和固定台2之间,便于进行理直馈线作业。固定位20、理线模块5的进料端、理线模块5的出料端以及夹装旋转模块4的输出端匀同轴设置,使天线的插接端与路由器外壳的天线插口同轴,便于馈线经路由器外壳的天线插口进入路由器外壳内部。
28.工作时,将天线夹持于夹装旋转模块4中,夹装旋转模块4将天线转动至预设的位置,使天线的插接端朝向固定位20方向,天线的插接端与路由器外壳的天线插口对应,理线模块5夹持馈线沿夹装旋转模块4朝固定位20方向滑动理线作业将馈线理直,馈线理直后,理线模块5停止工作,馈线被理线模块5承托于固定位20和夹装旋转模块4之间,第一驱动器3的输出端驱动夹装旋转模块4朝固定位20方向靠近,使天线靠近固定位20,馈线从路由器外壳的天线插口插入路由器外壳内,当馈线一半插入路由器外壳内时,理线模块5与馈线分离,避让天线,最终天线的插接端与路由器外壳的天线插口连接,使天线插接于路由器外壳的天线插口处,实现机械化的将天线组装于路由器外壳,确保组装质量的统一性,便于对组装质量的控制,同时也减轻工人工作量,提高了组装效率。
29.本实施例的理线模块5包括承托机构51、牵引机构52和驱动承托机构51和牵引机构52移动的第二驱动器53,第二驱动器53为线性模组、直角坐标机器人、直线滑台或者丝杆滑台。第二驱动器53固定端与机台1固定连接;
30.承托机构51包括第一机械手511,第一机械手511为两指的气动手指或者两指的电动夹指。第一机械手511的固定端与第二驱动器53的输出端连接,第一机械手511夹持端朝向固定位20的一侧设置有两相对设置的承托件512,使承托件512朝向固定位20,第一机械手511包括左夹持端和右夹持端,两承托件512分别固定于第一机械手511的左夹持端和右夹持端,使第一机械手511的左、右夹持端相靠近而实现两承托件512对馈线承托,第一机械手511的左、右夹持端相远离而实现两承托件512与馈线分离。
31.牵引机构52设置于第一机械手511夹持端朝向夹装旋转模块4的一侧,牵引机构52包括动力轮521、从动轮522以及驱动动力轮521和从动轮522转动的第三驱动器523,第三驱动器523为减速电机。第一机械手511的左夹持端设置有左固定件513,第一机械手511的右夹持端设置有右固定件514,第三驱动器523的固定端与右固定件514固定,第三驱动器523的输出端与动力轮521固定连接,使第三驱动器523带动动力轮521转动。从动轮522与左固定件513转动连接,动力轮521与从动轮522相对设置,使第一机械手511的左、右夹持端相靠近而使动力轮521与从动轮522相互靠近,便于动力轮521将馈线抵于从动轮522上带动馈线向远离夹装旋转模块4输出端方向拉动,使馈线理直。第一机械手511的左、右夹持端相远离而使动力轮521与从动轮522与馈线分离。
32.工作时,第一机械手511的左、右夹持端相靠近,馈线被承托于两承托件512之间,动力轮521将馈线抵于从动轮522上带动天线向远离夹装旋转模块4输出端方向拉动,使馈线理直,第二驱动器53的输出端驱动承托机构51和牵引机构52沿夹装旋转模块4朝固定位20方向滑动,当第二驱动器53的输出端靠近固定位20时,馈线完全被理直,第三驱动器523停止工作,动力轮521不转动,馈线被承托于承托机构51和牵引机构52之间,实现馈线被理线模块5承托于固定位20和夹装旋转模块4之间,第一驱动器3的输出端驱动夹装旋转模块4朝固定位20方向靠近,使天线靠近固定位20,馈线从路由器外壳的天线插口插入路由器外壳内,当馈线一半插入路由器外壳内时,第一机械手511的左、右夹持端相远离而使动力轮521与从动轮522与馈线分离,两承托件512与馈线分离,实现理线模块5与馈线分离,避让天线,便于馈线经路由器外壳的天线插口进入路由器外壳内部,天线的插接端与路由器外壳的天线插口连接,使天线插接于路由器外壳的天线插口处。
33.实际使用中馈线被承托于承托机构51和牵引机构52之间时,第一机械手511的左、右夹持端相远离一部分行程,便于馈线沿动力轮521与从动轮522之间,以及两承托件512之间滑动,便于第一驱动器3的输出端驱动夹装旋转模块4朝固定位20方向靠近时,使天线靠近固定位20,馈线顺畅的从路由器外壳的天线插口插入路由器外壳内。
34.本实施例的承托件512包括第一承托件515和第二承托件516,第一承托件515与第一机械手511的左夹持端固定连接,第二承托件516与第一机械手511的右夹持端固定连接,使两承托件512分别固定于第一机械手511的左、右夹持端。第一承托件515和第二承托件516相对的错位设置,第一承托件515和第二承托件516相对的端面均设置有用于承托馈线的第一凹槽517,使两第一凹槽517对馈线进行承托,便于第一承托件515和第二承托件516对馈线进行承托。第二承托件516对应第一承托件515的一侧设置有限位抵接块518,通过限位抵接块518与第一承托件515抵接,避免第一承托件515和第二承托件516夹住馈线而影响馈线滑动。
35.动力轮521为直齿轮,增大动力轮521与馈线之间的摩擦力,便于动力轮521将馈线
抵于从动轮522上带动馈线向远离夹装旋转模块4输出端方向拉动。从动轮522周向设置有线槽524,通过线槽524使馈线部分陷于从动轮522内,避免动力轮521将馈线抵于从动轮522上带动馈线向背离夹装旋转模块4输出端方向拉动的过程中,从动轮522将馈线压坏。
36.本实施例的夹装旋转模块4包括与第一驱动器3的输出端固定的固定座41、固定于固定座41的第四驱动器42和设置于第四驱动器42输出端的第二机械手43,第四驱动器42为减速电机,第二机械手43为三指或四指的气动手指或者三指或四指的电动夹指,使第四驱动器42输出端带动第二机械手43转动,便于夹装旋转模块4将天线夹持并转动,使天线的插接端与路由器外壳的天线插口对应。第二机械手43的夹持端朝向固定位20,第二机械手43的夹持端设置有夹持块44,通过夹持块44便于对天线进行夹持,使天线的插线口朝向固定位20,便于天线的插接端与路由器外壳的天线插口连接。实际使用中,夹持块44可以选择带有弹性的材质夹持块,如橡胶或硅胶材质夹持块减少夹持天线时对天线造成损伤。在夹持块44朝向天线的一端设置与天线外型相匹配的夹槽,有效提高夹持块44对天线夹持的稳定性。
37.本实施例的夹装旋转模块4和理线模块5之间设置有扶正夹紧模块6,通过扶正夹紧模块6夹持天线的插接端,确保天线的插接端与路由器外壳的天线插口同轴,便于天线的插接端与路由器外壳的天线插口连接。扶正夹紧模块6包括与固定座41滑动连接的缓冲支架61和固定于缓冲支架61端部的第三机械手62,第三机械手62为两指的气动手指或者两指的电动夹指。缓冲支架61与固定座41滑动连接,使扶正夹紧模块6随第一驱动器3输出端移动而位移。
38.第三机械手62的两自由端分别设置有夹爪63,夹爪63的固定端分别与第三机械手62的两自由端固定连接,使夹爪63随第三机械手62的两自由端相远离或闭合而实现对天线的插接端进行分离或夹持。夹爪63的自由端设置有用于夹紧天线的插接端的第二凹槽64,第二凹槽64相对设置,通过第二凹槽64对天线的插接端进行夹持。
39.固定台2对应缓冲支架61的位置设置有限位抵接件21,天线的插接端与路由器外壳的天线插口插后,缓冲支架61与限位抵接件21抵接,避免扶正夹紧模块6限制第一驱动器3的输出端驱动夹装旋转模块4朝固定位20方向靠近,使缓冲支架61与固定台2抵接后,第一驱动器3的输出端还能驱动夹装旋转模块4朝固定位20方向靠近。
40.工作时,第三机械手62的自由端相靠近使两夹爪63通过第二凹槽64将天线的插接端夹持,扶正夹紧模块6随第一驱动器3的输出端驱动夹装旋转模块4朝固定位20方向靠近,缓冲支架61与限位抵接件21抵接,第三机械手62的自由端相远离使两夹爪63分离松开天线的插接端,同时使扶正夹紧模块6的两夹爪63避让天线的插接端,第一驱动器3的输出端继续驱动夹装旋转模块4朝固定位20方向靠近,使天线的插接端与路由器外壳的天线插口插接。
41.本实施例的缓冲支架61包括与固定座41固定连接的滑动座611、滑动于滑动座611和固定座41的滑杆612以及固定于滑杆612远离固定座41一端的抵接板613,滑杆612设置有两根,可以防止抵接板613转动,同时可以提高滑动的可靠性。
42.抵接板613与第三机械手62的固定端连接,滑杆612上设置有缓冲件614,缓冲件614可以为弹簧、弹片或者弹性块。
43.缓冲件614抵于滑动座611与抵接板613之间,使滑动座611与抵接板613之间具有
缓冲空间,通过抵接板613与限位抵接件21抵接,使缓冲支架61与限位抵接件21抵接。滑杆612靠近固定座41的一端设置有限位块615,通过限位块615可以限制滑杆612保持滑动于滑动座611和固定座41之间。
44.本实施例的限位抵接件21包括与固定台2固定的限位座211和与限位座211连接的抵接杆212,限位座211设置有调整槽213,调整槽213的开口端设置有用于缩小调整槽213的开口端间距的紧固件214,紧固件214为螺栓或锁扣。通过松开或锁紧紧固件214可以实现固定或调整调整槽213与抵接杆212的位置,便于调整抵接杆212与限位座211之间的位置。
45.本实施例的夹爪63的一侧设置有用于检测天线位置的位置感应器7,位置感应器7为光电感应器。固定座41对应位置感应器7设置有侧支架45,位置感应器7与侧支架45固定连接,使位置感应器7固定于固定座41。实际使用中位置感应器7与plc控制器连接,plc控制器与第四驱动器42连接,通过plc控制器接收位置感应器7反馈天线位置的信息,通过plc控制器控制第四驱动器42,实现夹装旋转模块4将天线转动至预设的位置,使天线的插接端朝向固定位20方向,天线的插接端与路由器外壳的天线插口对应。
46.本实施例的第一驱动器3包括行程控制模块31,行程控制模块31包括固定于第一驱动器3固定端的两行程感应器32和与第一驱动器3输出端连接的行程触发件33,行程感应器32为光电感应器32,行程触发件33为触发板或触发杆。行程触发件33滑动于两行程感应器32之间,实现对第一驱动器3的行程进行控制。
47.本实施例的第一驱动器3固定端的一侧设置有调整滑槽34,行程感应器32固定于调整滑槽34内,行程感应器32与调整滑槽34连接的一端设置有滑动块35,滑动块35与调整滑槽34连接,通过滑动块35可以方便的调整行程感应器32与调整滑槽34的位置,便于使用。
48.以上内容仅为本实用新型的较佳实施例,对于本领域的普通技术人员,依据本实用新型的思想,在具体实施方式及应用范围上均会有改变之处,本说明书内容不应理解为对本实用新型的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1