一种焊接机器人的夹持机构的制作方法
1.本实用新型涉及焊接机器人技术领域,具体为一种焊接机器人的夹持机构。
背景技术:
2.焊接是一种以加热、高温或者高压的方式接合金属或其他热塑性材料的制造工艺,随着社会的不断发展,目前在焊接工艺中通常会利用焊接机器人来代替人工焊接,能够有效的提高焊接效果,而利用焊接机器人进行焊接操作时,需要使用到夹持结构对物料进行夹持固定,以便配合完成焊接操作。
3.经检索,专利公告号为cn213857761u公开了一种焊接机器人用夹持机构,包括外壳与电机,所述外壳内部通过转动连接有第一齿轮,所述第一齿轮通过联轴器与电机的输出端连接固定,所述电机通过螺丝与外壳的外表面连接固定,所述第一齿轮的外表面啮合有第二齿轮,所述外壳的内部设置有夹具,所述夹具包括第一夹爪与第二夹爪,所述第一夹爪与第二夹爪呈左右对称排布,且第一夹爪与第二夹爪皆通过转轴与外壳的内壁转动连接,所述第一夹爪背离外壳的一端固定有连接机构,所述连接机构包括连接筒,且连接筒与第一夹爪连接固定,所述连接筒的内部转动连接有连接杆,现有的技术中cn213857761u在使用的过程中不具备对夹持间距进行调节的功能,大多的夹持机构具有固定的夹持范围,不方便对较大的物料进行夹持,降低了适用范围,同时一般都是通过更换夹座的形式来适应不同形状的物料,操作较为麻烦,鉴于此我们提出一种焊接机器人的夹持机构来解决现有的问题。
技术实现要素:
4.本实用新型的目的在于提供一种焊接机器人的夹持机构,以解决上述背景技术中提出的问题。
5.为实现上述目的,本实用新型提供如下技术方案:一种焊接机器人的夹持机构,包括固定座、支撑架和调节座,所述固定座的顶部固定安装有液压推杆,所述固定座的底部固定连接有支撑架,所述支撑架之间固定安装有滑杆,所述滑杆的外侧滑动安装有活动套,所述活动套的底部固定连接有调节座,所述调节座的内部转动安装有螺纹转杆,所述螺纹转杆的底部螺纹安装有延伸出调节座的第二夹块,所述第二夹块的前端与后端转动安装有第一夹块,所述第一夹块之间螺纹安装有双向丝杆。
6.推动活动套顺着滑杆向外侧滑动,利用活动套能够同步带动调节座进行移动,通过调节座可以同步带动第一夹块与第二夹块进行移动,方便张开最大距离,通过将物料置于第一夹块与第二夹块之间,利用带动活动座向上移动,能够带动两组第二夹块进行合拢,可以较为方便的将物料进行夹持。
7.优选的,所述液压推杆的输出端通过螺栓安装有活动座,且活动座与活动套之间活动连接有活动杆。通过液压推杆的伸缩活动,能够方便推动活动座进行上下移动,利用活动座向下移动时,能够通过活动杆推动活动套顺着滑杆向外侧滑动。
8.优选的,所述螺纹转杆与第二夹块之间通过螺纹套座螺纹安装,调节座的底部开设有与第二夹块对应的开口。通过转动螺纹转杆能够带动螺纹套座进行左右移动,可以同步带动第二夹块进行移动,方便调节夹持的间距,能够方便夹持较大的物料。
9.优选的,所述第一夹块与第二夹块之间通过活动轴转动连接,且第二夹块与第一夹块的内侧黏贴有防滑垫。通过活动轴能够使第一夹块进行翻转活动,通过防滑垫能够提高物料与第一夹块以及第二夹块之间的摩擦力,不易发生脱落。
10.优选的,所述双向丝杆与第一夹块之间通过螺纹套架螺纹安装,且螺纹套架与第一夹块之间通过轴架活动连接。通过转动双向丝杆能够带动两组螺纹套架进行合拢与相互远离,通过轴架能够使螺纹套架跟随第一夹块的角度变化进行相应翻转活动,能够方便带动第一夹块进行翻转活动,可以根据物料的形状调节第一夹块与第二夹块之间的角度,能够方便夹持不同形状的物料。
11.优选的,所述液压推杆一侧的固定座顶部固定安装有固定架,且固定架的一侧固定连接有安装座。通过固定架能够方便对安装座进行支撑,安装座上开设有螺栓孔,能够方便将安装座与焊接机械臂进行安装固定,方便进行焊接操作。
12.与现有技术相比,本实用新型的有益效果是:
13.1、通过设置有调节座、螺纹套座与第二夹块之间的相互配合,能够通过带动螺纹套座进行移动,使第二夹块可以顺着调节座进行同步移动,能够较为方便的调节夹持距离,可以较为方便的对较大的物料进行夹持操作,提高了适用范围。
14.2、通过设置有第一夹块、第二夹块与螺纹套架之间的相互配合,能够通过带动螺纹套架相互合拢以及相互远离运动,可以较为方便的带动第一夹块进行张合,能够根据物料的形状调节至合适的张合开度,配合第二夹块可以方便对不同形状的物料进行夹持,无需进行更换操作,提高了工作效率。
附图说明
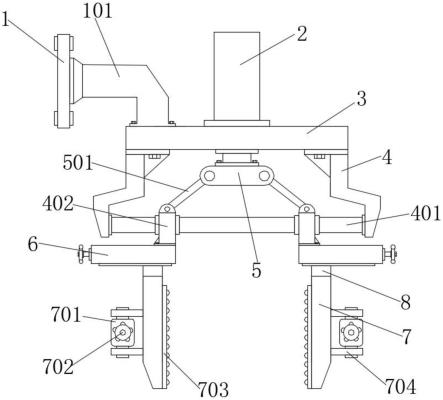
15.图1为本实用新型的正面结构示意图;
16.图2为本实用新型的调节座内部结构示意图;
17.图3为本实用新型的第二夹块侧面结构示意图;
18.图4为本实用新型的支撑架局部结构示意图。
19.图中:1、安装座;101、固定架;2、液压推杆;3、固定座;4、支撑架;401、滑杆;402、活动套;5、活动座;501、活动杆;6、调节座;601、螺纹转杆;602、螺纹套座;7、第一夹块;701、螺纹套架;702、双向丝杆;703、防滑垫;704、轴架;8、第二夹块;801、活动轴。
具体实施方式
20.下文结合附图和具体实施例对本实用新型的技术方案做进一步说明。
21.实施例一
22.如图1、图2、图3、图4所示,本实用新型提出的一种焊接机器人的夹持机构,包括固定座3、支撑架4和调节座6,固定座3的顶部固定安装有液压推杆2,固定座3的底部固定连接有支撑架4,支撑架4之间固定安装有滑杆401,滑杆401的外侧滑动安装有活动套402,活动套402的底部固定连接有调节座6,调节座6的内部转动安装有螺纹转杆601,螺纹转杆601的
底部螺纹安装有延伸出调节座6的第二夹块8,第二夹块8的前端与后端转动安装有第一夹块7,第一夹块7之间螺纹安装有双向丝杆702,液压推杆2的输出端通过螺栓安装有活动座5,且活动座5与活动套402之间活动连接有活动杆501,螺纹转杆601与第二夹块8之间通过螺纹套座602螺纹安装,调节座6的底部开设有与第二夹块8对应的开口,双向丝杆702与第一夹块7之间通过螺纹套架701螺纹安装,且螺纹套架701与第一夹块7之间通过轴架704活动连接。
23.基于实施例1的焊接机器人的夹持机构工作原理是:通过液压推杆2的伸缩活动,能够方便推动活动座5进行上下移动,利用活动座5向下移动时,能够通过活动杆501推动活动套402顺着滑杆401向外侧滑动,利用活动套402能够同步带动调节座6进行移动,通过调节座6可以同步带动第一夹块7与第二夹块8进行移动,方便张开最大距离,通过将物料置于第一夹块7与第二夹块8之间,利用带动活动座5向上移动,能够带动两组第二夹块8进行合拢,可以较为方便的将物料进行夹持,通过转动螺纹转杆601能够带动螺纹套座602进行左右移动,可以同步带动第二夹块8进行移动,方便调节夹持的间距,能够方便夹持较大的物料,提高了适用范围,通过转动双向丝杆702能够带动两组螺纹套架701进行合拢与相互远离,通过轴架704能够使螺纹套架701跟随第一夹块7的角度变化进行相应翻转活动,能够方便带动第一夹块7进行翻转活动,可以根据物料的形状调节第一夹块7与第二夹块8之间的角度,能够方便夹持不同形状的物料,操作方便快捷。
24.实施例二
25.如图1和图3所示,本实用新型提出的一种焊接机器人的夹持机构,相较于实施例一,本实施例还包括:第一夹块7与第二夹块8之间通过活动轴801转动连接,且第二夹块8与第一夹块7的内侧黏贴有防滑垫703,液压推杆2一侧的固定座3顶部固定安装有固定架101,且固定架101的一侧固定连接有安装座1。
26.本实施例中,如图3所示,通过活动轴801能够使第一夹块7进行翻转活动,通过防滑垫703能够提高物料与第一夹块7以及第二夹块8之间的摩擦力,不易发生脱落;如图1所示,通过固定架101能够方便对安装座1进行支撑,安装座1上开设有螺栓孔,能够方便将安装座1与焊接机械臂进行安装固定,方便进行焊接操作。
27.上述具体实施例仅仅是本实用新型的几种优选的实施例,基于本实用新型的技术方案和上述实施例的相关启示,本领域技术人员可以对上述具体实施例做出多种替代性的改进和组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1