一种与六轴机器人配合使用的钢管激光标识装置的制作方法
1.本实用新型涉及机械自动化技术领域,具体涉及一种与六轴机器人配合使用的钢管激光标识装置。
背景技术:
2.钢管下线标识是钢管下线进库前对钢管进行物料追踪及质量追溯的必要手段,传统的钢管标识是由操作工手动记录,现场存在严重的噪音污染,同时部分钢管仍保持高温,工人劳动强度大且存在安全隐患。
技术实现要素:
3.本实用新型提出了一种与六轴机器人配合使用的钢管激光标识装置;安装在六轴机器人上,由六轴机器人的位置转换动作带动其移动,该装置中的测距装置对钢管表面进行距离测量,从而配合激光刻标仪进行对焦;激光刻标仪完成钢管标识码的刻印工作;扫码装置完成钢管标识码的识别工作,使整个工作完成闭环;与六轴机器人配合使用的钢管激光标识装置自动化程度高,灵活性高,改变了传统人工钢管标识方式,可有效提高生产效率,降低工人的安全隐患。
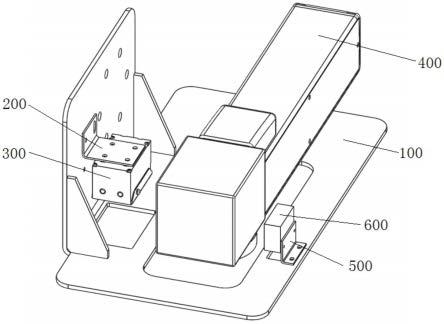
4.本实用新型提供一种与六轴机器人配合使用的钢管激光标识装置,包括:固定底座100、扫码连接件200、扫码装置300、激光刻标仪400、测距连接件500和测距装置600;固定底座100包括连接底板110和安装底板120;连接底板110具有若干个扫码固定孔112;扫码连接件具有若干个第一扫码固定孔210和若干个第二扫码固定孔220;螺钉穿过第二扫码固定孔220在与扫码装置300啮合;螺栓分别穿过第一扫码固定孔210,在穿过扫码固定孔112后与对应的螺母啮合;安装底板120上具有若干个激光固定孔122;螺钉穿过激光固定孔122,再与激光刻标仪400啮合;测距连接件具有若干个第一测距固定孔510和若干个第二测距固定孔520;螺钉穿过第一测距固定孔510,再与测距装置600啮合;安装底板120上还具有两个测距固定孔124;螺栓分别穿过第二测距固定孔520,再分别穿过测距固定孔124最后与对应的螺母啮合。
5.进一步,本实用新型提供一种与六轴机器人配合使用的钢管激光标识装置,还可以具有以下特征:固定底座100呈l型。
6.进一步,本实用新型提供一种与六轴机器人配合使用的钢管激光标识装置,还可以具有以下特征:固定底座100还包括两块直角三角形的加强筋130;直角三角形的加强筋130的一条直角边焊接固定在连接底板110上,另一条直角板焊接固定在安装底板120上。
7.进一步,本实用新型提供一种与六轴机器人配合使用的钢管激光标识装置,还可以具有以下特征:扫码连接件200呈l型;第一扫码固定孔210位于l型的一边,第二扫码固定孔220位于l型的另一边;测距连接件500也呈l型,第一测距固定孔510位于l型的一边,第二测距固定孔520位于l型的另一边。
8.进一步,本实用新型提供一种与六轴机器人配合使用的钢管激光标识装置,还可
以具有以下特征:测距连接件500也呈l型,第一测距固定孔510位于l型的一边,第二测距固定孔520位于l型的另一边。
9.进一步,本实用新型提供一种与六轴机器人配合使用的钢管激光标识装置,还可以具有以下特征:第一扫码固定孔210中的一个孔为腰型孔210a。
10.进一步,本实用新型提供一种与六轴机器人配合使用的钢管激光标识装置,还可以具有以下特征:激光刻标仪400的工作面朝向安装底板120,安装底板120相对应的位置具有激光窗口123。
11.进一步,本实用新型提供一种与六轴机器人配合使用的钢管激光标识装置,还可以具有以下特征:测距装置600的工作面朝向安装底板120,安装底板120相对应的位置具有测距窗口125。
12.进一步,本实用新型提供一种与六轴机器人配合使用的钢管激光标识装置,还可以具有以下特征:扫码装置300的工作面朝向安装底板120,安装底板120相对应的位置具有扫码窗口121。
13.进一步,本实用新型提供一种与六轴机器人配合使用的钢管激光标识装置,还可以具有以下特征:连接底板110上具有若干个机器人固定孔111,机器人固定孔111与六轴机器人2的第六轴法兰201上的孔相配,通过螺栓固定在六轴机器人的第六轴法兰201上。
附图说明
14.图1是实施例中六轴机器人与一种与六轴机器人配合使用的钢管激光标识装置的结构图。
15.图2是实施例中六轴机器人末端与一种与六轴机器人配合使用的钢管激光标识装置连接位置的示意图。
16.图3是实施例中一种与六轴机器人配合使用的钢管激光标识装置的结构图。
17.图4是实施例中固定底座的结构图。
18.图5是实施例中扫码连接件的结构图。
19.图6是实施例中测距连接件和测距装置的结构图。
具体实施方式
20.为了更加清晰的说明本实用新型的实现方式,以下结合附图及实例,对本实用新型进行进一步详细说明。此处所描述的具体例子仅仅用于解释本实用新型内容,并不用于限定本实施方式。
21.实施例
22.一种与六轴机器人配合使用的钢管激光标识装置1,其特征在于:包括固定底座100、扫码连接件200、扫码装置300、激光刻标仪400、测距连接件500和测距装置600。
23.本实施例中,固定底座100呈l型;固定底座100由连接底板110和安装底板120构成。连接底板110和安装底板120垂直焊接呈l型或两者一体成型。为了加强连接底板110和安装底板120连接强度,在连接底板110的两侧具有两块直角三角形的加强筋130。直角三角形的加强筋130的一条直角边焊接固定在连接底板110上,另一条直角板焊接固定在安装底板120上。
24.连接底板110上具有圆周均布的6个机器人固定孔111,机器人固定孔111与六轴机器人2的第六轴法兰201上的孔相配,通过螺栓固定在六轴机器人的第六轴法兰201上;从而实现将整个装置安装在六轴机器人200上。
25.本实施例中,连接底板110上还六个扫码固定孔112,六个扫码固定孔112呈三行分布,每行两个,这样设置可以实现扫码装置200三个位置的调节。
26.本实施例中,扫码连接件200也呈l型。一边具有两个第一扫码固定孔210,另一个具有四个第二扫码固定孔220。四个螺钉穿过第二扫码固定孔220在与扫码装置300啮合,实现扫码连接件200与扫码装置300的固定连接。本实施例中,扫码装置200选用可自动对焦的红外扫码仪。
27.本实施例中,第一扫码固定孔210中的一个孔为腰型孔210a,且腰型孔为圆弧形。两个螺栓分别穿过两个第一扫码固定孔210,在穿过任意一行的两个扫码固定孔112,扫码连接件200固定在固定底座100上。腰型孔210a可以调节扫码装置300的角度。固定后,扫码装置300的工作面朝向安装底板120,安装底板120相对应的位置具有扫码窗口121。
28.本实施例中,安装底板120上具有6个激光固定孔122。激光固定孔122呈三行分布,每行两个。若干个螺钉穿过激光固定孔122,再与激光刻标仪400啮合,实现激光刻标仪400与固定底座100的固定连接。固定后,激光刻标仪400的工作面朝向安装底板120,安装底板120相对应的位置具有激光窗口123。本实施例中,激光刻标仪400选用大功率脉冲光纤激光器。
29.本实施例中,测距连接件500也呈l型,一边具有第一测距固定孔510,另一边具有第二测距固定孔520。两个螺钉穿过第一测距固定孔510,再与测距装置600啮合,实现测距装置600与测距连接件500的固定连接。
30.本实施例中,安装底板120上还具有两个测距固定孔124。两个螺栓分别穿过第二测距固定孔520,再分别穿过测距固定孔124最后与螺母啮合,实现测距连接件500与固定底座100的固定连接。固定后,测距装置600的工作面朝向安装底板120,安装底板120相对应的位置具有测距窗口125。
31.扫码窗口121、激光窗口123、测距窗口125为开设相应大小的空槽,再在空槽上设置透明材质隔离板,保证设备正常工作的前提下,可有效隔热隔尘。
32.本实施例中六轴机器人钢管激光标识装置的工作过程:
33.六轴机器人2工作,带动钢管激光标识装置运动至钢管端头上空,并使测距装置600位于钢管正上方进行距离测量,为激光刻标仪400进行对焦提供数据支撑;上位系统通过测量得来的距离控制六轴机器人工作,带动钢管激光标识装置对激光刻标仪400进行对焦;激光刻标仪400进行工作,工作完成后扫码装置200进行扫码确认,完成闭环工作。
34.特别说明,测距计算与来料识别由上位六轴机器人控制系统完成,本实用新型提供的一种与六轴机器人配合使用的钢管激光标识装置不涉及软件控制内容,仅保护装置硬件结构。尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1