一种扣合组装设备的制作方法
1.本实用新型涉及自动化设备技术领域,尤其涉及一种扣合组装设备。
背景技术:
2.在产品的实际生产中,离不开将物料扣合组装到产品上的工序,例如在电子产品的生产过程中,需要将fpc(柔性电路板)上的连接端扣合组装到产品上连接座,当前该扣合组装的操作基本只能依靠人手操作完成,具体地,操作人员手持fpc,然后将fpc的连接端扣合组装到产品的连接座上,上述过程中,操作人员在扣合组装时,手部承受的压力巨大,并且操作人员长时间工作容易疲惫,严重影响生产效率。
3.因此,寻找一钟能够解决上述技术问题的技术方案成为本领域技术人员所研究的重要课题。
技术实现要素:
4.本实用新型实施例公开了一种扣合组装设备,用于解决现有生产中,扣合组装工序由人手操作完成导致生产效率低下的技术问题。
5.本实用新型实施例提供了一种扣合组装设备,包括机台,所述机台上设置有y轴移动组件,所述y轴移动组件上连接有x轴移动组件,所述y轴移动组件用于驱动所述x轴移动组件沿y轴方向移动,所述x轴移动组件上连接有用于对物料进行吸取的吸取组件以及用于将物料扣合到产品上的扣合组件,所述吸取组件与所述扣合组件在y轴方向上相对设置,所述x轴移动组件用于驱动所述吸取组件以及所述扣合组件在x轴方向上移动;
6.所述机台上还设置有翻转组件,所述翻转组件用于对吸取组件转移过来的物料进行翻转,所述机台上设置有用于输送产品的x轴输送带,所述x轴输送带位于所述翻转组件的侧面,所述x轴输送带上设置有扣合组装工位,所述扣合组装工位上设置有可升降的第一定位治具,所述产品经过所述扣合组装工位时,所述第一定位治具对产品进行定位并支撑;
7.所述输送带的出料端处还设置有整形保压工位,所述整形保压工位上设置有可升降的第二定位治具,完成扣合组装工序的产品经过所述整形保压工位时,所述第二定位治具对产品进行定位并支撑,所述整形保压工位的一侧设置有用于对完成扣合组装工序的产品进行整形保压的整形保压组件,所述整形保压组件安装于所述机台上。
8.可选地,所述翻转组件包括第一支撑架、第一y向气缸、第一z向气缸、第一真空吸附板以及第二真空吸附板;
9.所述第一支撑架上安装有旋转气缸,所述第二真空吸附板的第一端部与所述旋转气缸连接,所述第二真空吸附板的第二端转动连接于所述第一支撑架上,所述旋转气缸可驱动所述第二真空吸附板绕x轴旋转;
10.所述第一y向气缸安装于所述机台上,所述第一z向气缸连接于所述第一y向气缸,所述第一真空吸附板连接于所述第一z向气缸上,所述第一真空吸附板可在所述第一z向气缸的驱动下沿z轴方向上升以与所述第二真空吸附板进行贴合。
11.可选地,所述吸取组件包括第一z轴驱动模组、第一旋转电机以及用于吸取物料的吸取板;
12.所述第一z轴驱动模组连接于所述x轴移动组件上,所述第一旋转电机与所述第一z轴驱动模组连接,所述第一z轴驱动模组用于驱动所述第一旋转电机沿z轴方向移动,所述吸取板连接于所述第一旋转电机,所述第一旋转电机用于驱动所述吸取板绕z轴旋转。
13.可选地,还包括第一ccd拍照模组和第二ccd拍照模组;
14.其中,所述第一ccd拍照模组连接于所述x轴移动组件,并且所述第一ccd拍照模组设置于所述吸取组件的一侧;
15.所述第二ccd拍照模组位于所述扣合组装工位的一侧。
16.可选地,所述扣合组件包括第二z轴驱动模组、第二旋转电机、压力传感器以及扣合模组;
17.所述第二z轴驱动模组连接于所述x轴移动组件上,所述第二z轴驱动模组上连接有连接板,所述连接板可在所述第二z轴驱动模组的驱动下沿z轴方向移动,所述压力传感器连接于所述连接板上,所述第二旋转电机与所述压力传感器连接,所述扣合模组与所述第二旋转电机连接,所述第二旋转电机可驱动所述扣合模组绕z轴旋转。
18.可选地,所述扣合模组包括连接框架、夹指气缸以及吸取夹块;
19.所述连接框架与所述第二旋转电机连接,所述连接框架的底部连接有弹性缓冲件,所述弹性缓冲件连接有固定框架,所述夹指气缸固定安装于所述固定框架内,所述夹指气缸的相对两个连接端均连接有一个所述吸取夹块,所述夹指气缸可驱动两个所述吸取夹块相互靠近或远离以对物料的连接端进行夹紧或松开,所述吸取夹块的底面为用于对物料的连接端的表面进行吸附的真空吸附面。
20.可选地,所述扣合组件的数量为两个,其中一个所述扣合组件连接有y轴移动微调模组,另一个所述扣合组件连接有x轴移动微调模组,所述y轴移动微调模组以及所述x轴移动微调模组均连接于所述x轴移动组件上。
21.可选地,所述第一定位治具包括支撑块、第二z向气缸、第二阻挡模组、第一阻挡模组以及用于支撑产品的第一承托板;
22.所述第二z向气缸固定于所述支撑块上,所述第一承托板与所述第二z向气缸连接,所述第一承托板可在所述第二z向气缸的驱动下沿z轴方向移动;
23.所述第一阻挡模组包括第九z向气缸、第十z向气缸以及第一阻挡块;
24.在x轴方向上,所述第九z向气缸以及所述第十z向气缸分别设置于所述第一承托板的相对两侧;所述第九z向气缸以及所述第十z向气缸上均连接有所述第一阻挡块,两个所述第一阻挡块可受驱对产品进行阻挡;
25.所述第二阻挡模组包括第三z向气缸、第四z向气缸以及第二阻挡块;
26.在x轴方向上,所述第三z向气缸以及所述第四z向气缸分别设置于所述第一承托板的相对两侧;所述第三z向气缸以及所述第四z向气缸上均连接于所述第二阻挡块,两个所述第二阻挡块可受驱对产品进行阻挡。
27.可选地,所述第二定位治具包括第五z向气缸、第二承托板、第六z向气缸以及第三阻挡块;
28.所述第二承托板与所述第五z向气缸连接,所述第五z向气缸用于驱动所述第二承
托板沿z轴方向移动,所述第六z向气缸设置于所述x轴输送带的出料侧与所述第二承托板之间,所述第三阻挡块与所述第六z向气缸连接,所述第三阻挡块可受驱对产品进行阻挡。
29.可选地,所述整形保压组件包括第二支撑架、第七z向气缸、双向气缸、第一整形保压块、第八z向气缸、第一x向气缸以及第二整形保压块;
30.所述第二支撑架安装于所述工作台上,所述第七z向气缸以及所述第八z向气缸安装于所述第二支撑架上,所述双向气缸与所述第七z向气缸连接,所述第一x向气缸与所述第八z向气缸连接,所述双向气缸的两个活塞杆均连接所述第一整形保压块,所述双向气缸可驱动两个所述第一整形保压块在x轴方向上相互靠近或远离,所述第一x向气缸连接所述第二整形保压块。
31.从以上技术方案可以看出,本实用新型实施例具有以下优点:
32.本实施例中,扣合组装设备开始运行,x轴输送带将产品输送到扣合组装工位,此时,第一定位治具顶升以将产品进行支撑,紧接着,吸取组件在x轴移动组件以及y轴移动组件的带动下对物料进行吸取,并且吸取组件受驱将物料转移到翻转组件上,随后翻转组件对物料进行翻转,然后,扣合组件在x轴移动组件以及y轴移动组件的带动下移动到扣合组装工位上,扣合组件将物料扣合组装到产品上完成扣合组装工序,最后,产品在x轴输送带的带动下移动到整形保压工位,第二定位治具顶升以将产品进行支撑,整形保压组件对产品进行整形保压工序,接着产品从x轴输送带流出。
附图说明
33.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其它的附图。
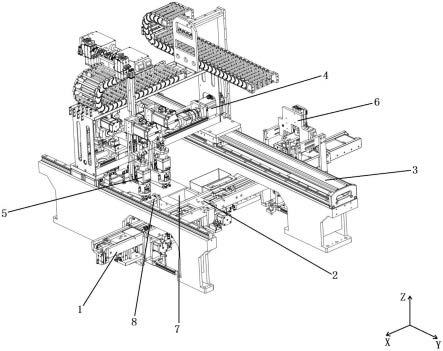
34.图1为本实用新型实施例中提供的一种扣合组装设备的结构示意图;
35.图2为本实用新型实施例中提供的一种扣合组装设备的另一视角示意图;
36.图3为本实用新型实施例中提供的一种扣合组装设备的翻转组件的结构示意图;
37.图4为本实用新型实施例中提供的一种扣合组装设备的吸取组件的结构示意图;
38.图5为本实用新型实施例中提供的一种扣合组装设备的扣合组件的结构示意图;
39.图6为本实用新型实施例中提供的一种扣合组装设备的扣合组件中的扣合模组的结构示意图;
40.图7为本实用新型实施例中提供的一种扣合组装设备的x轴输送带的结构示意图;
41.图8为本实用新型实施例中提供的一种扣合组装设备的第一定位治具的结构示意图;
42.图9为本实用新型实施例中提供的一种扣合组装设备的第二定位治具的结构示意图;
43.图10为本实用新型实施例中提供的一种扣合组装设备的整形保压组件的结构示意图;
44.图示说明:x轴输送带1;第一定位治具2;支撑块201;第二z向气缸202;第九z向气缸203;第十z向气缸204;第一阻挡块205;第一承托板206;第三z向气缸207;第四z向气缸
208;第二阻挡块209;y轴移动组件3;x轴移动组件4;扣合组件5;第二z轴驱动模组501;压力传感器502;第二旋转电机503;扣合模组504;连接框架5041;弹性缓冲件5042;固定框架5043;夹指气缸5044;吸取夹块5045;整形保压组件6;第二支撑架601;第七z向气缸602;双向气缸603;第一整形保压块604;第八z向气缸605;第一x向气缸606;第二整形保压块607;第二ccd拍照模组7;翻转组件8;第一支撑架801;第一y向气缸802;第一z向气缸803;第一真空吸附板804;旋转气缸805;第二真空吸附板806;吸取组件9;第一z轴驱动模组901;第一旋转电机902;吸取板903;第一ccd拍照模组10;扣合组装工位11;第二定位治具12;第五z向气缸1201;第二承托板1202;第六z向气缸1203;第三阻挡块1204;整形保压工位13;第二y向气缸14;夹紧板15;物料a;产品b。
具体实施方式
45.本实用新型实施例公开了一种扣合组装设备,用于解决现有生产中,扣合组装工序由人手操作完成导致生产效率低下的技术问题。
46.为了使本技术领域的人员更好地理解本实用新型方案,下面结合附图和具体实施方式对本实用新型作进一步的详细说明。显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
47.请参阅图1至图10,本实用新型实施例中提供的一种扣合组装设备,包括:
48.机台,所述机台上设置有y轴移动组件3,所述y轴移动组件3上连接有x轴移动组件4,所述y轴移动组件3用于驱动所述x轴移动组件4沿y轴方向移动,所述x轴移动组件4上连接有用于对物料进行吸取的吸取组件9以及用于将物料扣合到产品上的扣合组件5,所述吸取组件9与所述扣合组件5在y轴方向上相对设置,所述x轴移动组件4用于驱动所述吸取组件9以及所述扣合组件5在x轴方向上移动;
49.所述机台上还设置有翻转组件8,所述翻转组件8用于对吸取组件9转移过来的物料进行翻转,所述机台上设置有用于输送产品的x轴输送带1,所述x轴输送带1位于所述翻转组件8的侧面,所述x轴输送带1上设置有扣合组装工位11,所述扣合组装工位11上设置有可升降的第一定位治具2,所述产品经过所述扣合组装工位11时,所述第一定位治具2对产品进行定位并支撑;
50.所述输送带的出料端处还设置有整形保压工位13,所述整形保压工位13上设置有可升降的第二定位治具12,完成扣合组装工序的产品经过所述整形保压工位13时,所述第二定位治具12对产品进行定位并支撑,所述整形保压工位13的一侧设置有用于对完成扣合组装工序的产品进行整形保压的整形保压组件6,所述整形保压组件6安装于所述机台上。
51.本实施例中,扣合组装设备开始运行,x轴输送带1将产品输送到扣合组装工位11,此时,第一定位治具2顶升以将产品进行支撑,紧接着,吸取组件9在x轴移动组件4以及y轴移动组件3的带动下对物料进行吸取,并且吸取组件9受驱将物料转移到翻转组件8上,随后翻转组件8对物料进行翻转,然后,扣合组件5在x轴移动组件4以及y轴移动组件3的带动下移动到扣合组装工位11上,扣合组件5将物料扣合组装到产品上完成扣合组装工序,最后,产品在x轴输送带1的带动下移动到整形保压工位13,第二定位治具12顶升以将产品进行支撑,整形保压组件6对产品进行整形保压工序,接着产品从x轴输送带1流出。
52.进一步地,本实施例中的翻转组件8包括第一支撑架801、第一y向气缸802、第一z向气缸803、第一真空吸附板804以及第二真空吸附板806;
53.所述第一支撑架801上安装有旋转气缸805,所述第二真空吸附板806的第一端部与所述旋转气缸805连接,所述第二真空吸附板806的第二端转动连接于所述第一支撑架801上,所述旋转气缸805可驱动所述第二真空吸附板806绕x轴旋转;
54.所述第一y向气缸802安装于所述机台上,所述第一z向气缸803连接于所述第一y向气缸802,所述第一真空吸附板804连接于所述第一z向气缸803上,所述第一真空吸附板804可在所述第一z向气缸803的驱动下沿z轴方向上升以与所述第二真空吸附板806进行贴合。
55.需要说明的是,本实施例中的翻转组件8的具体原理为:
56.吸取组件9将物料具体转移到第一真空吸附板804上,第一真空吸附板804在第一y向气缸802以及第一z向气缸803的驱动下,第一真空吸附板804带着物料与第二真空吸附板806进行贴合,此时第一真空吸附板804可断开真空吸附,第二真空吸附板806开启真空吸附,物料被第二真空吸附板806进行吸附固定,随后第一真空吸附板804受驱沿z轴方向下降远离第二真空吸附板806,最后第二真空吸附板806在旋转气缸805的带动下将物料进行翻转,具体地将物料翻转180
°
,即使得原来朝向下方的物料的第二表面朝向上方,原来朝向上方的物料的第一表面朝向下方。
57.进一步地,本实施例中的吸取组件9包括第一z轴驱动模组901、第一旋转电机902以及用于吸取物料的吸取板903;
58.所述第一z轴驱动模组901连接于所述x轴移动组件4上,所述第一旋转电机902与所述第一z轴驱动模组901连接,所述第一z轴驱动模组901用于驱动所述第一旋转电机902沿z轴方向移动,所述吸取板903连接于所述第一旋转电机902,所述第一旋转电机902用于驱动所述吸取板903绕z轴旋转。
59.需要说明的是,本实施例中的吸取组件9的具体工作原理为:
60.吸取组件9受驱沿x轴方向以及y轴方向移动到物料的上料位置,第一z轴驱动模组901驱动吸取板903沿z轴方向向下运动以对物料进行吸取,同时第一旋转电机902可驱动吸取板903旋转以使得物料转动到预设位置。
61.进一步地,本实施例中还包括第一ccd拍照模组10和第二ccd拍照模组7;
62.其中,所述第一ccd拍照模组10连接于所述x轴移动组件4,并且所述第一ccd拍照模组10设置于所述吸取组件9的一侧;
63.所述第二ccd拍照模组7位于所述扣合组装工位11的一侧。
64.需要说明的是,本实施例中的第一ccd拍照模组10的第一个作用为:第一ccd拍照模组10受驱移动到物料的上料位,然后对物料进行拍照以确定物料实际位置,从而便于吸取组件9准确吸取物料;第一ccd拍照模组10的第二个作用为:第一ccd拍照模组10受驱移动到扣合组装工位11上对产品进行拍照以确定产品需要扣合组装的位置,以便于扣合组件5能够准确地将物料扣合组装到产品上;第一ccd拍照模组10的第三个作用为:对完成扣合组装后的产品进行拍照,以便确认产品是否合格。
65.本实施例中的第二ccd拍照模组7的作用为:对扣合组件5上的物料进行拍照检测以确保扣合组件5已经从翻转组件8取走物料。
66.进一步地,本实施例中的扣合组件5包括第二z轴驱动模组501、第二旋转电机503、压力传感器502以及扣合模组504;
67.所述第二z轴驱动模组501连接于所述x轴移动组件4上,所述第二z轴驱动模组501上连接有连接板,所述连接板可在所述第二z轴驱动模组501的驱动下沿z轴方向移动,所述压力传感器502连接于所述连接板上,所述第二旋转电机503与所述压力传感器502连接,所述扣合模组504与所述第二旋转电机503连接,所述第二旋转电机503可驱动所述扣合模组504绕z轴旋转。
68.需要说明的是,上述的压力传感器502用于检测扣合模组504在将物料扣合组装到产品时的压力,从而有效避免扣合模组504对产品施加过大组装压力导致产品受损。
69.进一步地,上述的扣合模组504具体包括连接框架5041、夹指气缸5044以及吸取夹块5045;
70.所述连接框架5041与所述第二旋转电机503连接,所述连接框架5041的底部连接有弹性缓冲件5042,所述弹性缓冲件5042连接有固定框架5043,所述夹指气缸5044固定安装于所述固定框架5043内,所述夹指气缸5044的相对两个连接端均连接有一个所述吸取夹块5045,所述夹指气缸5044可驱动两个所述吸取夹块5045相互靠近或远离以对物料的连接端进行夹紧或松开,所述吸取夹块5045的底面为用于对物料的连接端的表面进行吸附的真空吸附面。
71.需要说明的是,上述的弹性缓冲件5042可为弹簧。
72.另外,当扣合模组504下降物料扣合组装到产品时,固定框架5043往上压缩弹性缓冲件5042,接着夹指气缸5044驱动两个吸取夹块5045松开,此时吸取夹块5045仅对物料的连接端进行吸附,最后吸取夹块5045在受驱的情况下降物料扣合组装到产品上。
73.另外,在扣合模组504对翻转组件8上的物料进行取料时,夹指气缸5044驱动两个吸取夹块5045分别夹紧物料的连接端,同时吸取夹块5045的真空吸附面对物料的连接端的表面进行吸附固定,最后,扣合模组504受驱沿z轴方向上升完成取料工序。
74.进一步地,本实施例中的扣合组件5的数量为两个,其中一个所述扣合组件5连接有y轴移动微调模组,另一个所述扣合组件5连接有x轴移动微调模组,所述y轴移动微调模组以及所述x轴移动微调模组均连接于所述x轴移动组件4上。
75.需要说明的是,通过上述的设计,可同时对两个物料进行扣合组装,有利于进一步提升工作效率。
76.进一步地,本实施例中的第一定位治具2包括支撑块201、第二z向气缸202、第二阻挡模组、第一阻挡模组以及用于支撑产品的第一承托板206;
77.所述第二z向气缸202固定于所述支撑块201上,所述第一承托板206与所述第二z向气缸202连接,所述第一承托板206可在所述第二z向气缸202的驱动下沿z轴方向移动;
78.所述第一阻挡模组包括第九z向气缸203、第十z向气缸204以及第一阻挡块205;
79.在x轴方向上,所述第九z向气缸203以及所述第十z向气缸204分别设置于所述第一承托板206的相对两侧;所述第九z向气缸203以及所述第十z向气缸204上均连接有所述第一阻挡块205,两个所述第一阻挡块205可受驱对产品进行阻挡;
80.所述第二阻挡模组包括第三z向气缸207、第四z向气缸208以及第二阻挡块209;
81.在x轴方向上,所述第三z向气缸207以及所述第四z向气缸208分别设置于所述第
一承托板206的相对两侧;所述第三z向气缸207以及所述第四z向气缸208上均连接于所述第二阻挡块209,两个所述第二阻挡块209可受驱对产品进行阻挡。
82.需要说明的是,本实施例中的第一定位治具2的具体工作原理为:
83.当产品移动到扣合组装工位11时,首先第四z向气缸208和第十z向气缸209分别同时驱动第二阻挡块209和第一阻挡块205上升以对产品进行阻挡,随后第二z向气缸202驱动第一承托板206上升对产品进行支撑,以增加产品的支撑面积,防止产品在扣合物料时产品倾斜或被压伤。
84.在另一实施例中,产品可从右向左沿x轴输送带1运输,当产品移动到扣合组装工位11时,第三z向气缸207和第九z向气缸203分别同时驱动第二阻挡块209和第一阻挡块205上升以对产品进行阻挡,随后第二z向气缸202驱动第一承托板206上升对产品进行支撑,以增加产品的支撑面积,防止产品在扣合物料时产品倾斜或被压伤。
85.另外,本实施例中的x轴输送带1的一侧还设置有对产品进行夹紧的夹紧模组,具体地,如图8所示,该夹紧模组包括第二y向气缸14以及夹紧板15,夹紧板15与第二y向气缸14连接。当产品被第一阻挡块205和第二阻挡块209阻挡后,第二y向气缸14驱动夹紧板15沿y轴方向移动以对产品进行夹紧,使产品的位置得以固定,以便于后续的扣合组装工序进行。
86.进一步地,本实施例中的第二定位治具12包括第五z向气缸1201、第二承托板1202、第六z向气缸1203以及第三阻挡块1204;
87.所述第二承托板1202与所述第五z向气缸1201连接,所述第五z向气缸1201用于驱动所述第二承托板1202沿z轴方向移动,所述第六z向气缸1203设置于所述x轴输送带1的出料侧与所述第二承托板1202之间,所述第三阻挡块1204与所述第六z向气缸1203连接,所述第三阻挡块1204可受驱对产品进行阻挡。
88.需要说明的是,本实施例中的第二定位治具12的具体工作原理为:
89.当产品完成扣合组装工序后,产品被x轴输送带1带动到整形保压工位13上,此时,第六z向气缸1203驱动第三阻挡块1204上升以阻挡产品继续移动,随后,第五z向气缸1201驱动第二承托板1202上升对产品进行支撑,以增加产品的支撑面积,防止产品在整形保压时产品倾斜或被压伤。
90.进一步地,本实施例中的整形保压组件6包括第二支撑架601、第七z向气缸602、双向气缸603、第一整形保压块604、第八z向气缸605、第一x向气缸606以及第二整形保压块607;
91.所述第二支撑架601安装于所述工作台上,所述第七z向气缸602以及所述第八z向气缸605安装于所述第二支撑架601上,所述双向气缸603与所述第七z向气缸602连接,所述第一x向气缸606与所述第八z向气缸605连接,所述双向气缸603的两个活塞杆均连接所述第一整形保压块604,所述双向气缸603可驱动两个所述第一整形保压块604在x轴方向上相互靠近或远离,所述第一x向气缸606连接所述第二整形保压块607。
92.需要说明的是,本实施例中的整形保压组件6的具体工作原理为:
93.该整形保压组件6具体对完成扣合组装工序的产品进行两次保压,其中第一次整形保压过程为:第七z向气缸602驱动双向气缸603以及第一整形保压块604沿z轴方向往下移动,从而使得第一整形保压块604对产品上的物料进行下压,随后双向气缸603驱动两个
第一整形保压块604靠近和远离,从而完成第一次整形保压工序;第二次保压过程为:当完成第一次整形保压后,第八z向气缸605驱动第一x向气缸606以及第二整形保压块607沿z轴方向往下移动,从而使得第二整形保压块607对产品上的物料进行下压,随后,第一x向气缸606驱动第二整形保压块607沿x轴方向移动以对物料进行第二次整形,至此,完成扣合组装的产品完成整形保压工序,产品最后从x轴输送带1的出料端处流出。
94.进一步地,本实施例中的x轴移动组件4、y轴移动组件3、第一z轴驱动模组901、第二z轴驱动模组501、y轴移动微调模组、x轴移动微调模组可为现有技术中的伺服电机配合丝杠传动的直线运动机构或伺服电机配合皮带传动的直线运动机构,设计人员可根据实际设备运行精度要求选择合适的直线运动机构,本实施例对此并不作限制。
95.进一步地,本实施例中的扣合组装设备在实际应用中可适用于电子产品的扣合组装工序,例如产品具体为电子产品,如智能手机;物料具体为fpc。
96.以上对本实用新型所提供的一种扣合组装设备进行了详细介绍,对于本领域的一般技术人员,依据本实用新型实施例的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本实用新型的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1