方框式端面铣削机用三轴联动系统及方框式端面铣削机的制作方法
1.本实用新型涉及风电叶片端面加工技术领域,具体涉及一种方框式端面铣削机用三轴联动系统及方框式端面铣削机。
背景技术:
2.风力发电机通常由塔架、位于塔架上的风力发电机叶片、轮毂、机舱、机舱内的传动系统、控制系统和发电机等组成。风力发电机叶片和轮毂之间一般通过螺纹连接为一体,因而在叶片制作过程中就会在叶片根端设置预埋件即螺栓。在叶片和轮毂连接之前,叶片根端即叶片根部端面需要保证一定的精度,即整个端面和预埋件要达到统一的精度,一般通过铣削的加工处理方式来使其平面度达到规定要求。
3.然而,由于叶片根端直径较大,尤其是大功率的风力发电机,叶片根部和轮毂进行螺纹连接的结合面直径达到两米多(甚至两层楼的高度),这更加大了叶片根端的端面定位和加工的难度。由于叶片外形的限制,无法采用常规的端面铣床来完成加工。
4.本技术人为此设计了一款方框式端面铣削机,通过方框式端面铣削机的方框的每个角部上安装的固定夹紧装置,来从外部固定夹紧叶片外周面。但针对此款铣削机,现有的铣削运动系统不再适配,因此迫切需要设计一款能够带动铣削头在三个轴向上联动来完成铣削的系统。
技术实现要素:
5.为此,本实用新型提供一种方框式端面铣削机用三轴联动系统及方框式端面铣削机将是有利的。
6.为实现上述目的,根据本实用新型的一个方面,提供一种方框式端面铣削机用三轴联动系统,其包括运动控制器和与运动控制器电连接的三轴联动装置,该三轴联动装置包括x轴横梁组件、z轴移动机构、x轴移动机构和y轴进给机构,其中,z轴移动机构固定于x轴横梁组件的后侧上并设置成z轴可移动地连接在方框式端面铣削机的方框的左右两侧上,x轴移动机构设置成x轴可移动地安装于x轴横梁组件的前侧上,y轴进给机构经由x轴移动机构安装于x轴横梁组件的顶部上、并设置成y轴可移动地支撑方框式端面铣削机的铣削头,并且其中,z轴移动机构和x轴移动机构设置成能够在运动控制器的控制下带动y轴进给机构及其上的铣削头以与工件的被铣削端面形状适配的圆形轨迹运动。
7.在本实用新型中,通过上述结构,铣削头能够被y轴进给机构带动着沿y轴方向前后进给,y轴进给机构能够同时被x轴移动机构和z轴移动机构带动着沿x轴和z轴所在垂直平面作圆形轨迹运动,从而对整个工件的被铣削端面进行铣削。
8.进一步,z轴移动机构、x轴移动机构和y轴进给机构上都设置有位置传感器,该等位置传感器与运动控制器电连接。
9.通过上述结构设置,使得运动控制器能够实时掌控并实现铣削头在x、y、z这三个轴向上的运动。
10.再进一步,z轴移动机构、x轴移动机构和y轴进给机构分别包括其上设置有位置传感器的z轴伺服电机、x轴伺服电机和y轴伺服电机,其中,位置传感器为编码器。
11.通过上述设置,运动控制器可以根据这些电机上的编码器信息来掌控在x、y、z这三个轴向上位置,进而根据需要控制各电机的启停。
12.还进一步,x轴横梁组件包括x轴横梁、安装于x轴横梁左右两侧上的左横梁连接座和右横梁连接座、以及装设于x轴横梁顶部上的x向滑轨。
13.更进一步,z轴移动机构还包括分别固定连接于左横梁连接座和右横梁连接座的左侧连接座和右侧连接座、两端分别可转动地安装于左侧连接座和右侧连接座上的z向移动长轴、分别在左侧连接座和右侧连接座的内侧安装于z向移动长轴上的左z向齿轮和右z向齿轮、分别安装于方框的左右两侧上并适于分别啮合左z向齿轮和右z向齿轮的左z向齿条和右z向齿条,其中,上述z轴伺服电机安装于右侧连接座上并驱动连接z向移动长轴,左侧连接座和右侧连接座都设置有适于滑动连接方框的左右两侧的x向开口滑座和y向开口滑座。
14.通过上述结构设置,使得z轴移动机构前侧固定于x轴横梁组件的后侧上,z轴移动机构后侧一方面经由左侧连接座和右侧连接座的每个连接座上的x向开口滑座和y向开口滑座滑动连接至方框的左右两侧的其中一侧上,另一方面经由z向移动长轴带动的左z向齿轮和右z向齿轮分别与方框左右两侧上设置的左z向齿条和右z向齿条相啮合来实现z向移动。
15.又进一步,z轴伺服电机经由z轴减速机驱动连接z向移动长轴,z轴减速机经由减速机连接座安装于右侧连接座的外侧上。
16.通过上述结构设置,z轴伺服电机能够经由z轴减速机驱动z向移动长轴,然后z向移动长轴带动其上的左z向齿轮和右z向齿轮一起转动,从而z轴移动机构沿着固定于方框的左右两侧上的左z向齿条和右z向齿条上下运动,从而带动x轴横梁组件以及其上的x轴移动机构和y轴进给机构上下运动。
17.另进一步,x轴移动机构还包括与x向滑轨滑动连接的x轴移动座、可转动地安装于x轴移动座上的x向齿轮、固定安装于x轴横梁的前侧上并与x向齿轮啮合的x向齿条,其中,x轴移动座的底部设置有前侧电机座,上述x轴伺服电机安装于该前侧电机座前侧上并驱动连接位于前侧电机座后侧的x向齿轮,并且,y轴进给机构经由该x轴移动座安装于x轴横梁组件的顶部上。
18.通过上述结构设置,使得x轴伺服电机能够驱动x向齿轮沿着x向齿条移动,从而整个x轴移动座带动着y轴进给机构沿着x轴方向移动。
19.再进一步,y轴进给机构还包括可滑动地安装于x轴移动座上的y轴移动座,y轴伺服电机固定安装于x轴移动座的前侧上并驱动连接该y轴移动座,并且,铣削头安装于该y轴移动座上。
20.通过上述结构设置,使得y轴进给机构能够经由y轴移动座带动铣削头沿y轴方向进给。
21.还进一步,铣削头包括铣削安装支座、安装于铣削安装支座上的铣削动力箱、以及由铣削动力箱旋转驱动的铣削刀头,其中,在该铣削动力箱上安装有与运动控制器电连接的测距激光头。
22.通过上述结构设置,使得铣削头能够实现对整个工件的端面的铣削,而且测距激光头的设置,可以使得铣削量得到精准控制。
23.根据本实用新型的另一个方面,提供一种方框式端面铣削机,其包括方框和上述的方框式端面铣削机用三轴联动系统。
24.通过这种结构设置,可以实现方框式端面铣削机的铣削。
25.通过参考下面所描述的实施例,本实用新型的上述这些方面和其他方面将会得到更清晰地阐述。
附图说明
26.本实用新型的结构以及进一步的目的和优点将通过下面结合附图的描述得到更好地理解,其中,相同的参考标记标识相同的元件:
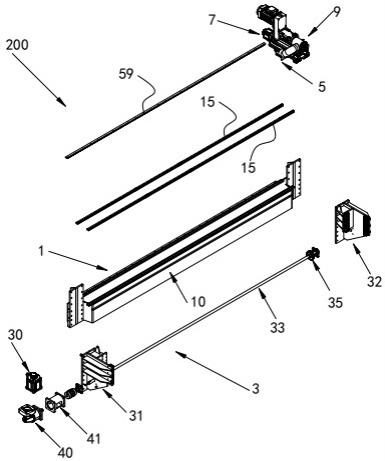
27.图1是根据本实用新型的一个具体实施方式的方框式端面铣削机用三轴联动系统的立体示意图;
28.图2是图1所示方框式端面铣削机用三轴联动系统的一个立体分解示意图;
29.图3是图1所示方框式端面铣削机用三轴联动系统的另一个立体分解示意图;
30.图4是图1所示方框式端面铣削机用三轴联动系统的一个立体分解示意图应用在方框式端面铣削机上的立体示意图;
31.图5是图4所示方框式端面铣削机的局部d的放大示意图;
32.图6是图4所示方框式端面铣削机的右侧平面视图;
33.图7是图6所示方框式端面铣削机的局部e的放大示意图;
34.图8是图1所示方框式端面铣削机用三轴联动系统的右侧连接座的立体结构示意图;
35.图9是图1所示方框式端面铣削机用三轴联动系统的左侧连接座的立体结构示意图;
36.图10是图1所示方框式端面铣削机用三轴联动系统在去除z轴移动机构和x轴横梁组件之后的立体结构示意图;
37.图11是图10所示立体结构的分解示意图。
具体实施方式
38.下面将结合附图来描述本实用新型的具体实施方式。
39.首先,需要说明的是,本文中所称的“x向”、“y向”和“z向”分别指的是沿着x轴方向、沿着y轴方向和沿着z轴方向,x轴方向是指x横梁的延伸方向即左右方向,y轴方向是指前后方向,z轴方向是指竖直上下方向。
40.如图1至图7所示,根据本实用新型的一个具体实施方式的方框式端面铣削机100用三轴联动系统包括运动控制器(图未示)和三轴联动装置200。该三轴联动装置200与运动控制器电连接,并且包括x轴横梁组件1、z轴移动机构3、x轴移动机构5和y轴进给机构7,y轴进给机构7上安装有铣削头9,其中,z轴移动机构3和x轴移动机构5设置成能够在运动控制器的控制下带动y轴进给机构7及其上的铣削头9以与工件(在本实施方式中是风电叶片)的被铣削端面形状适配的圆形轨迹运动,同时y轴进给机构7设置成能够带动其上的铣削头9
沿y轴方向进给。
41.如图1至图3所示,在本实施方式中,x轴横梁组件1包括x轴横梁10、安装于x轴横梁10左右两侧上的左横梁连接座11和右横梁连接座12、以及装设于x轴横梁10顶部上的x向滑轨15。
42.如图1至图3所示,并参考图4至图7,z轴移动机构3固定于x轴横梁组件1的x轴横梁10的后侧上,并设置成z轴可移动地(即沿着z轴方向可移动地)连接在方框式端面铣削100的方框101的左右两侧上,即方框101的左立柱102和右立柱104上。
43.具体地,如图1至图9所示,在本实施方式中,z轴移动机构3包括z轴伺服电机30、左侧连接座31和右侧连接座32、z向移动长轴33、左z向齿轮34和右z向齿轮35、左z向齿条36和右z向齿条37。z轴伺服电机30安装于右侧连接座32上并驱动连接z向移动长轴33。左侧连接座31和右侧连接座32分别固定连接至左横梁连接座11和右横梁连接座12上。z向移动长轴33两端分别可转动地安装于左侧连接座31和右侧连接座32上。左z向齿轮34和右z向齿轮35分别在左侧连接座31和右侧连接座32的内侧安装于z向移动长轴33上。左z向齿条36和右z向齿条37分别对应安装于方框101的左立柱102和右立柱104上,并适于分别啮合左z向齿轮34和右z向齿轮35。
44.如图5、图8和图9所示,左侧连接座31和右侧连接座32都设置有x向开口滑座38和y向开口滑座39。如图5所示,以右侧连接座32为例,其上的x向开口滑座38和y向开口滑座39分别滑动连接方框101的右立柱104上的第一滑轨184和第二滑轨194。另外,如图5所示,并参考图1和图3,z轴伺服电机30经由z轴减速机40驱动连接z向移动长轴33,z轴减速机40经由减速机连接座41安装于右侧连接座32的外侧上。
45.如图1至图3所示,并参考图10和图11,x轴移动机构5设置成x轴可移动地(即沿着x轴方向可移动地)安装于x轴横梁组件1的前侧上,并包括x轴伺服电机50、x轴移动座55、x向齿轮57和x向齿条59。其中,x轴移动座55与x向滑轨15滑动连接;x向齿轮57可转动地安装于x轴移动座55上;x向齿条59固定安装于x轴横梁10的前侧上(图5很清晰地示出了),并与x向齿轮57啮合。具体地,如图10和图11所示,在本实施方式中,x轴移动座55的底部设置有前侧电机座56,x轴伺服电机50安装于该前侧电机座56的前侧上,x向齿轮57位于前侧电机座56的后侧并由x轴伺服电机50驱动连接。
46.再如图10和图11所示,y轴进给机构7经由x轴移动机构5安装于x轴横梁组件1的顶部上、并设置成y轴可移动地(即沿着y轴方向可移动地)支撑铣削头9。具体地,在本实施方式中,y轴进给机构7包括y轴伺服电机70和y轴移动座75,其中,y轴伺服电机70固定安装于x轴移动座55的前侧上并驱动连接y轴移动座75,同时y轴移动座75可滑动地安装于x轴移动座55上,从而能够在y轴伺服电机70的驱动下相对x轴移动座55沿y轴方向前后移动。
47.需要说明的是,在本实施方式中,z轴伺服电机30、x轴伺服电机50和y轴伺服电机70上都设置有编码器(图未示),这些编码器作为位置传感器与运动控制器电连接,从而使得运动控制器能够通过控制z轴伺服电机30、x轴伺服电机50和y轴伺服电机70的启停来精准控制三轴联动装置在x轴、y轴、z轴三个方向上的运动。
48.另外,需要说明的是,铣削头9安装于该y轴移动座75上,并且,铣削头9包括铣削安装支座92、安装于铣削安装支座92上的铣削动力箱90、以及由铣削动力箱90旋转驱动的铣削刀头94。在本实施方式中,在该铣削动力箱90上安装有测距激光头91,该测距激光头91也
与运动控制器电连接,从而能够对工件的被铣削端面进行加工前后的测量。
49.再如图4和图6所示,本实用新型的另一个方面提供一种方框式端面铣削机100,其包括方框101、运动控制器和三轴联动装置200(即上述的方框式端面铣削机用三轴联动系统),在运动控制器的控制下,三轴联动装置200能够沿方框101作上下移动运动,同时y轴移动机构7带着铣削头9能够作圆形轨迹运动,以便铣削风电叶片的整个根部端面即叶片根端上的螺栓,并且,通过y轴移动机构7沿y轴方向上的进给运动、以及铣削头9的铣削刀头94的旋转运动来实现铣削。
50.本实用新型通过三轴联动的运动控制,可以不再像传统的绕圈方式需要旋转电极供电通电,而是动力线和信号线都可以走拖链实接,这样的好处是信号稳定无干扰,因而使得整个铣削机安全可靠。
51.本实用新型的技术内容及技术特点已揭示如上,然而可以理解,在本实用新型的创作思想下,本领域的技术人员可以对上述结构作各种变化和改进,包括这里单独披露的或要求保护的技术特征的组合,以及明显地包括这些特征的其它组合。这些变形和/或组合均落入本实用新型所涉及的技术领域内,并落入本实用新型权利要求的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1