一种数控系统控制智能新型万向节轴加工设备的制作方法
本技术涉及一种数控系统控制智能新型万向节轴加工设备,属于万向节轴加工。
背景技术:
1、万向节轴又称十字轴,十字轴是实现变角度动力传递的机件,用于需要改变传动轴线方向的位置,十字轴式刚性万向节为汽车上广泛使用的不等速万向节,十字轴是十字轴式刚性万向节关键件之一,十字轴由基体和自基体的前后左右分别延伸出的轴体组成,在基体的上下两个对称面上设置有凹陷或者贯穿有圆孔。
2、传统十字轴加工设备在对十字轴进行加工时,需要分别对十字轴的不同端进行加工,传统机床加工需要对十字轴进行多次装夹来满足对不同轴端的加工这样会导致工件多次装夹产生加工误差,影响工件质量。
技术实现思路
1、本实用新型所要解决的技术问题在于:提供一种数控系统控制智能新型万向节轴加工设备,它解决了现有技术中,传统机床加工需要对十字轴进行多次装夹来满足对不同轴端的加工这样会导致工件多次装夹产生加工误差,影响工件质量的问题。
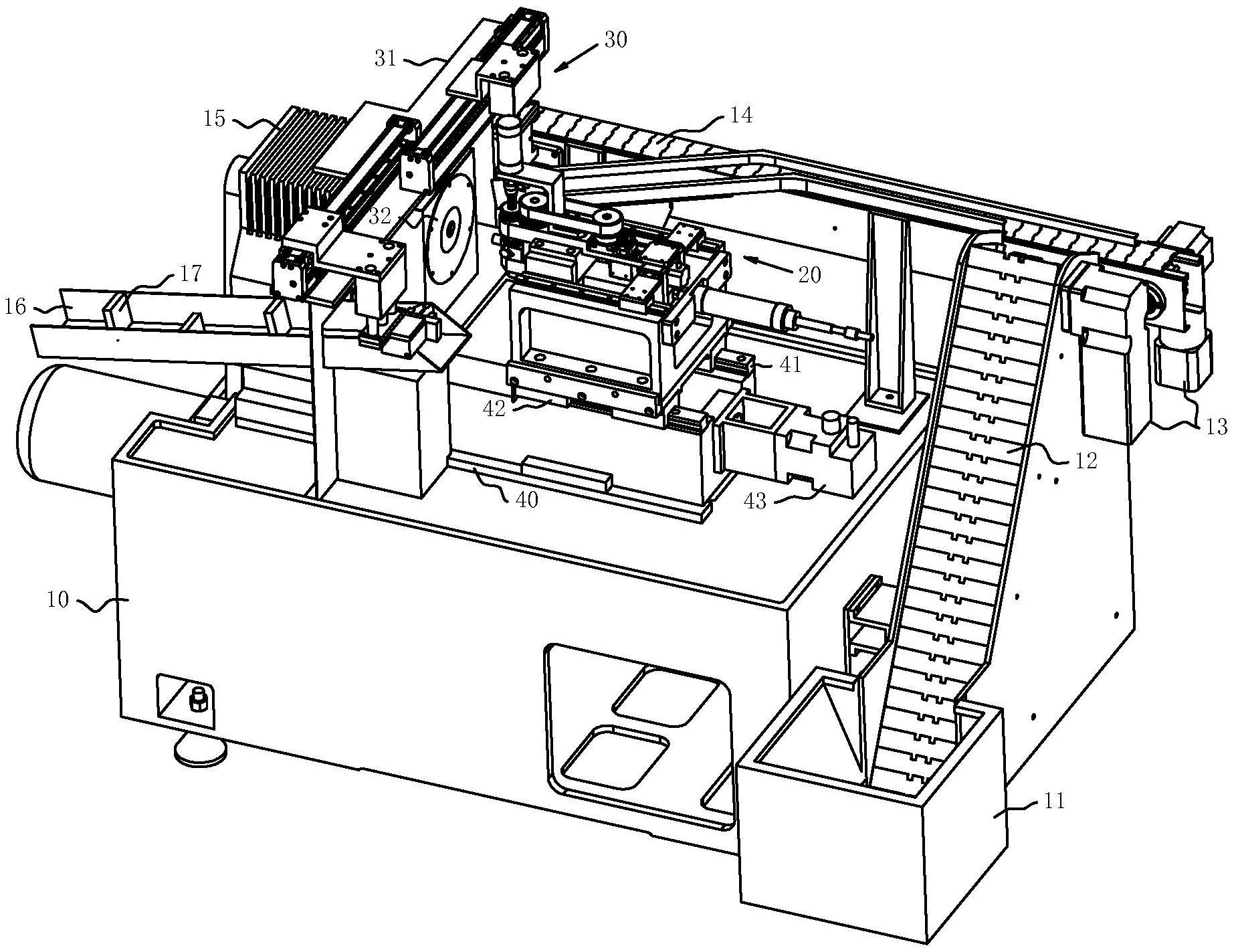
2、本实用新型所要解决的技术问题采取以下技术方案来实现:一种数控系统控制智能新型万向节轴加工设备,包括基座、遮挡罩、出入料转运装置、加工送料装置、上下料机械手装置、分隔支撑板、固定进料盘块,遮挡罩与加工送料装置并排设置在基座上,遮挡罩内为空心状设置,遮挡罩内设置有切削装置,分隔支撑板设置在遮挡罩朝向加工送料装置的一端,分隔支撑板与基座固定连接,固定进料盘块设置在分隔支撑板上,出入料转运装置设置在基座边缘处,上下料机械手装置安装在分隔支撑板上端。
3、通过采用上述技术方案,出入料转运装置将加工件转运至上下料机械手装置处,由上下料机械手装置将工件装夹在加工送料装置上,加工送料装置将工件运送至遮挡罩内,而后遮挡罩内的切削装置进行加工,单次加工完毕后加工送料装置将工件旋转九十度再次运送至遮挡罩内进行加工,从而达到将工件的四个轴端完全加工的目的,仅需要对工件一次装夹即可完成全部切削流程,避免重复装夹造成工件产生较大的加工误差,提高了工件加工质量。
4、本实用新型进一步设置为:上下料机械手装置包括滑动座、机械手滑动轨道、机械手滑块、上料机械手和下料机械手,滑动座安装在分隔支撑板上端,滑动座的延伸方向与转动进料盘块轴向垂直,机械手滑动轨道固定在滑动座远离分隔支撑板的一端,机械手滑块沿机械手滑动轨道的延伸方向滑动安装在机械手滑动轨道上,滑动座、机械手滑动轨道和机械手滑块组合形成轨道组,分隔支撑板上设置有两个轨道组,两个轨道组相互平行设置,上料机械手和下料机械手分别固定在两个轨道组中的机械手滑块上,滑动座内设有动力源,动力源驱动机械手滑块沿机械手滑动轨道的延伸方向滑动,动力源为直线电机或电机丝杠组,当动力源为电机丝杠组时,丝杠与机械手滑块螺纹连接,动力源、上料机械手和下料机械手通过数控系统进行控制。
5、通过采用上述技术方案,动力源驱动机械手滑块运动,从而带动上料机械手或下料机械手直线运动,当上料机械手运动时,上料机械手通过常规机械手运动过程将位于出入料转运装置内的工件抓取,而后通过上述过程驱动机械手滑块运动,从而使上料机械手位置进行调节,当上料机械手运动至加工送料装置处时,将工件放在加工送料装置上,从而完成上料作业,当下料机械手运动时,通过上述过程使下料机械手运动至加工送料装置装夹工件的部分,下料机械手将工件抓取后运动至出入料转运装置将工件放置,从而完成上料和出料的过程,整个过程无需人工干预,通过数控系统自动控制,提高了工件加工效率。
6、本实用新型进一步设置为:出入料转运装置包括进料组件和排料组件,进料组件包括工件存储箱、第一传输带、传输带驱动源和第二传输带,工件存储箱安装在基座外侧,第二传输带安装在基座靠近上料机械手的一侧边上,第一传输带将工件存储箱与第二传输带连接,传输带驱动源外挂固定在第一传输带和第二传输带外侧,传输带驱动源分别与第二传输带和第一传输带动力连接,传输带驱动源通过数控系统进行控制。
7、通过采用上述技术方案,工件存储在工件存储箱内,传输带驱动源分别驱动第一传输带和第二传输带运转,通过第一传输带的抬升转运,将工件运输至第二传输带上,并通过第二传输带将工件转运至上料机械手处,通过上料机械手的夹持转移完成对工件的上料步骤,由于采用传送带式的上料步骤,使工件上料速率能够进行控制,有利于数控系统进行控制。
8、本实用新型进一步设置为:排料组件包括出料滑道,出料滑道固定在分隔支撑板上,出料滑道的一端延伸至下料机械手的一侧,出料滑道的另一端穿过分隔支撑板向靠近基座的方向倾斜设置。
9、通过采用上述技术方案,使用下料机械手将加工完成的工件抓取后,通过动力源驱动机械手滑块带动下料机械手朝向出料滑道的方向运动,移动到位后,下料机械手松开工件,工件落入出料滑道内,沿出料滑道的倾斜方向滑动排出,从而达到了出料的作用,且过程无需加装电机气缸等额外动力设备,数控系统无需对其进行操控,降低了数控系统的复杂程度,有利于数控系统更好地对加工设备进行控制。
10、本实用新型进一步设置为:出料滑道呈u形设置,出料滑道内侧交错设置有若干柔性阻拦刷,柔性阻拦刷与出料滑道内侧壁固定连接。
11、通过采用上述技术方案,工件在出料滑道内滑动时,柔性阻拦刷能够阻碍工件下滑的速度,从降低工件从出料滑道内滑出的速度,避免工件滑出速度过大不易控制并掉落损坏的情况出现。
12、本实用新型进一步设置为:加工送料装置包括加工滑动底座、平移气缸、加工支撑底座、加工滑轨、加工滑块、加工驱动组件和装夹组件,加工支撑底座固定在基座上,加工滑轨固定在加工支撑底座远离基座的一侧,加工滑轨朝向上下料机械手装置的方向延伸,加工滑块设置在加工滑轨上,加工滑块沿加工滑轨的延伸方向滑动,加工滑动底座固定在加工滑块远离加工滑轨的一侧,加工驱动组件固定在加工支撑底座远离上下料机械手装置的外侧,加工驱动组件包括电机丝杠结构,电机丝杠结构中的丝杠与加工滑动底座螺纹连接,装夹组件设置在加工滑动底座上,平移气缸固定在加工滑动底座远离上下料机械手装置的外侧,平移气缸与装夹组件动力连接,装夹组件在加工滑动底座上沿加工滑轨的延伸方向滑动,工件装夹在装夹组件朝向上下料机械手装置的一侧。
13、通过采用上述技术方案,加工驱动组件通过电机驱动丝杠转动使加工滑动底座带动加工滑块在加工滑轨上滑动,从而使加工滑动底座朝向上下料机械手装置的方向运动从而给予加工滑动底座沿加工滑轨方向的移动自由度,同时平移气缸能够推动装夹组件沿加工滑轨的延伸方向运动,从而进一步拓展了装夹组件的移动范围,由于工件装夹在装夹组件上,从而提高了工件的运动范围。
14、本实用新型进一步设置为:装夹组件包括轨道件、分度盘安装板、驱动组件安装板、驱动组件、夹紧气缸、气缸支架、夹紧块、旋转齿轮、花键轴、连接接头和分度组件,轨道件包括固定滑轨和第二滑块,固定滑轨固定在加工滑动底座上,第二滑块滑动安装在固定滑轨上,第二滑块与分度盘安装板固定连接,分度盘安装板滑动设置在加工滑动底座上,分度盘安装板与平移气缸动力连接,驱动组件安装板安装在分度盘安装板远离加工滑动底座的一侧,气缸支架安装在驱动组件安装板远离分度盘安装板的一侧,驱动组件分别安装在分度盘安装板和驱动组件安装板上,夹紧气缸竖直固定在气缸支架上,连接接头与夹紧气缸的输出轴转动连接,花键轴固定设置在连接接头远离夹紧气缸的一侧,旋转齿轮转动设置在驱动组件安装板上,花键轴与旋转齿轮花键连接,花键轴远离连接接头的一端穿过驱动组件安装板延伸至驱动组件安装板朝向分度盘安装板的一侧,花键轴远离连接接头的一端与夹紧块固定连接,分度装置设置在分度盘安装板上,分度装置与夹紧块竖直对齐。
15、通过采用上述技术方案,夹紧气缸驱动连接接头竖直方向运动,从而带动花键轴竖直方向运动,进而使夹紧块竖直方向运动,当工件放置在分度盘安装板朝向上下料机械手装置一端的分度组件上,夹紧块朝向基座的方形运动时,夹紧块与工件抵接并将工件固定在分度组件上,从而完成对工件的夹紧步骤,无需人工夹紧,减少了人工干预的步骤。
16、本实用新型进一步设置为:分度装置包括分度盘调节驱动件和分度盘,分度盘设置在分度盘安装板朝向夹紧块的一侧,分度盘与夹紧块竖直对齐,分度盘调节驱动件固定在分度盘安装板远离驱动组件安装板的一侧,分度盘调节驱动件与分度盘动力连接。
17、通过采用上述技术方案,分度盘调节驱动件能够调整改变分度盘的分度角度,分度盘与工件抵接,与夹紧块共同对工件完成装夹。
18、本实用新型进一步设置为:驱动组件包括转动调节电机、中间齿轮和传动带轮组,转动调节电机固定在分度盘安装板上,传动带轮组安装在驱动组件安装板上,中间齿轮转动设置在驱动组件安装板上并与旋转齿轮啮合,转动调节电机与传动带轮组动力连接,传动带轮组与中间齿轮动力连接,转动调节电机通过传动带轮组驱动中间齿轮转动。
19、通过采用上述技术方案,转动调节电机驱动传动带轮组运动,从而带动中间齿轮转动,中间齿轮转动调动旋转齿轮转动,由于旋转齿轮和花键轴为花键套接,此时夹紧块跟随花键轴转动,由于夹紧块与工件抵接,此时夹紧块带动工件转动,由分度盘限制工件的转动角度,从而达到固定角度转动工件的目的,无需人工进行工件的角度转换同时也避免了工件的多次装夹,减少了多次装夹造成的加工误差。
20、本实用新型的有益效果是:
21、1.加工送料装置将工件运送至遮挡罩内,而后遮挡罩内的切削装置进行加工,单次加工完毕后加工送料装置将工件旋转九十度再次运送至遮挡罩内进行加工,从而达到将工件的四个轴端完全加工的目的,仅需要对工件一次装夹即可完成全部切削流程,避免重复装夹造成工件产生较大的加工误差,提高了工件加工质量。
22、2.夹紧气缸驱动连接接头竖直方向运动,从而带动花键轴竖直方向运动,进而使夹紧块竖直方向运动,当工件放置在分度盘安装板朝向上下料机械手装置一端的分度组件上,夹紧块朝向基座的方形运动时,夹紧块与工件抵接并将工件固定在分度组件上,从而完成对工件的夹紧步骤,无需人工夹紧,减少了人工干预的步骤。
23、3.工件在出料滑道内滑动时,柔性阻拦刷能够阻碍工件下滑的速度,从降低工件从出料滑道内滑出的速度,避免工件滑出速度过大不易控制并掉落损坏的情况出现。
- 还没有人留言评论。精彩留言会获得点赞!