一种基于三轴运动的自动焊接装置
本技术涉及焊接,尤其是涉及一种基于三轴运动的自动焊接装置。
背景技术:
1、焊接在工业制造领域具有非常重要的地位,是一种综合性极强的技术,在航天航空、国防军工、汽车及零部件制造业等领域有很广泛的应用。过去的人工焊接技术和焊接平台需要大量的人力资源,而且对于操作人员的技术要求较高。因此,过去的人工焊接及焊接平台满足不了目前的焊接质量和效率要求。此外,操作人员在进行焊接作业时,焊接过程中产生的强光,烟雾等会给操作人员的身体健康造成很大的威胁。随着科学技术的不断进步,自动化焊接技术在机械制造行业中快速发展并在行业中占据了有利地位。目前,智能化和自动化焊接成为现代焊接领域的研究热点。而在现有少数自动化焊接装置中其自动化程度低,焊接方式单一,工作效率低,同时由于动力结构在运行时,由于其稳定性差以及信息采集误差大,导致焊接出的效果差,并且无法满足对于不同厚度尺寸的钢板进行焊接,适应性较低。
技术实现思路
1、本实用新型旨在至少解决现有技术中存在的技术问题之一。为此,本实用新型提出了一种基于三轴运动的自动焊接装置
2、根据本实用新型第一方面实施例的基于三轴运动的自动焊接装置,包括:
3、支撑平台;
4、结构相同的第一横向传动机构和第二横向传动机构;所述第一横向传动机构和所述第二横向传动机构平行安装于所述支撑平台表面;
5、执行机构,所述执行机构固定设置于所述支撑平台表面;所述执行机构分别与所述第一横向传动机构、所述第二横向传动机构啮合连接;
6、竖向传动机构,所述竖向传动机构垂直于所述第一横向传动机构,所述竖向传动机构一端活动连接所述第一横向传动机构,所述竖向传动机构另一端活动连接所述第二横向传动机构;
7、升降传动机构,所述升降传动机构活动连接所述竖向传动机构,所述升降传动机构垂直于所述竖向传动机构;所述升降传动机构顶端固定连接有固定平台;
8、焊接机构,远离所述执行机构的所述支撑平台表面固定设置有所述焊接机构。
9、根据本实用新型实施例的一种基于三轴运动的自动焊接装置,通过所述固定平台将待焊接的金属板按特定方式固定,所述固定平台与所述焊接机构相适配;使在焊接过程稳定性更高,可适应性广,同时焊接效果更好;通过所述横向传动机构、所述执行机构、所述竖向传动机构和所述升降传动机构的设置,自动地将待焊接的金属板移动到最合适的焊接空间位置;提高焊接效率,通过所述焊接机构设置,所述焊接机构通过多步进电机配合可以在空间多自由度运动,同时由于所述焊接机构设置有激光定位装置,其自动化程度更高,信息采集稳定焊接精准度高;整个焊接过程只需人工将待焊接的金属板固定在固定平台上,后续焊接本实用新型装置自动化进行,保护操作人员的健康安全,节省人力降低焊接成本。
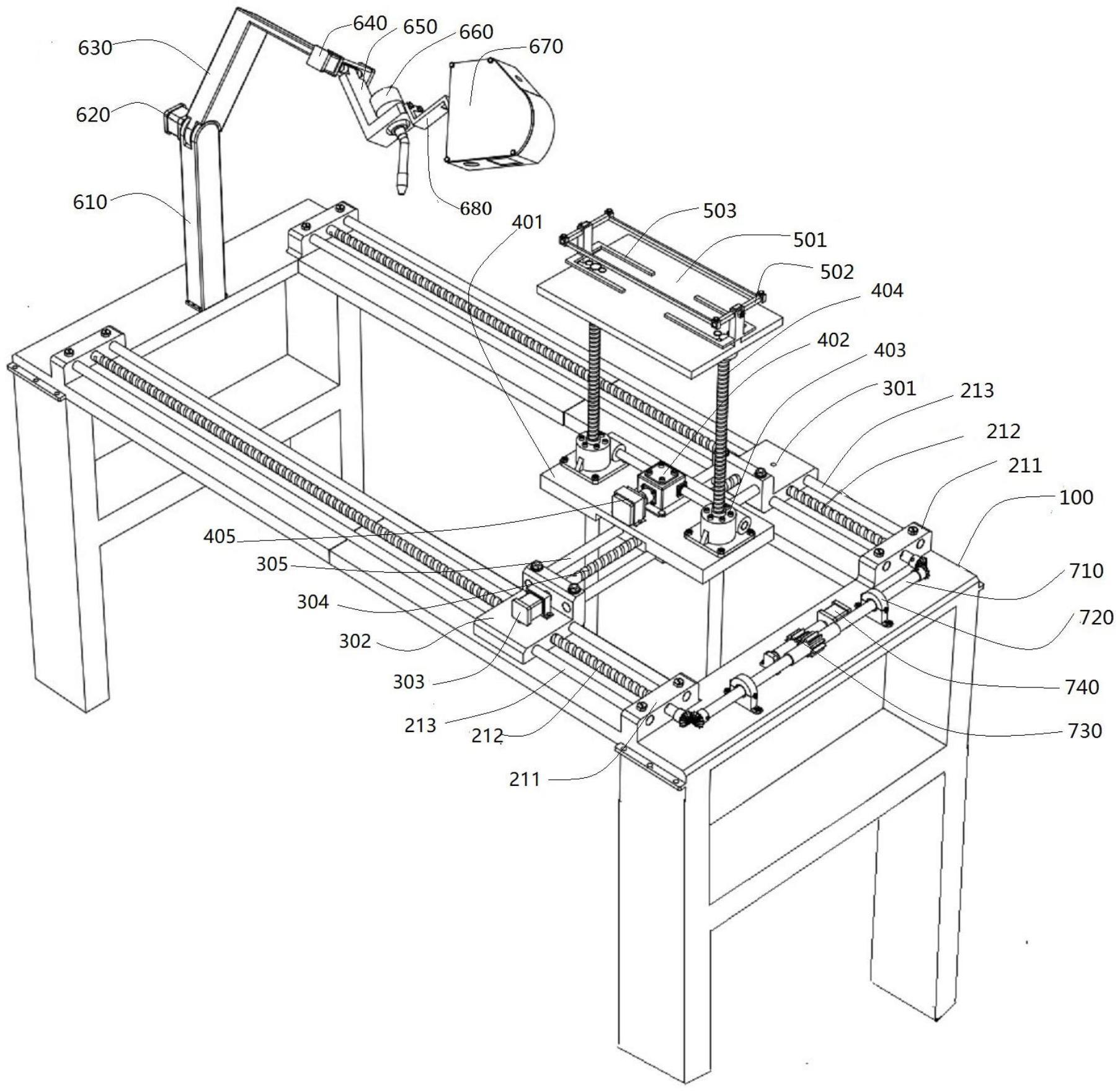
10、根据本实用新型的一些实施例,所述焊接机构包括:支柱、旋转臂、焊接枪固定臂、定位装置和定位固定臂;所述支柱一端固定连接所述支撑平台,远离所述支撑平台的所述支柱一端活动连接所述旋转臂,远离所述支柱的所述旋转臂一端活动连接所述焊接枪固定臂,远离所述旋转臂的所述焊接枪固定臂一端固定连接所述定位固定臂,所述定位固定臂另一端固定连接所述定位装置;所述焊接枪固定臂固定设置有焊接枪,所述支柱与所述旋转臂活动连接处设置有第四步进电机,所述旋转臂与所述焊接枪固定臂活动连接处设置有第五步进电机。多步进电机设置及配合工作,使所述焊接机构实现在空间位置多角度运动,可实现多种特殊焊接方式,其焊接效率更高。
11、根据本实用新型的一些实施例,所述定位装置包括:框架、ccd相机、拱形支架及激光夹持器;所述框架固定连接所述定位固定臂,ccd相机内底部固定安装所述ccd相机;靠近所述ccd相机的所述框架内中部固定连接所述拱形支架,所述拱形支架的拱形顶端活动连接所述激光夹持器。通过所述激光夹持器设置及为适应所述ccd相机设置的框架,解决了焊接时信息采集不稳定,误差大问题;所述ccd相机及所述激光的设置,使精准定位到金属板待焊接的位置,通过所述焊接枪实现自动焊接,在焊接移动过程中,所述ccd相机及所述激光可实现实时采集数据,保证其焊接的精准性及稳定性。
12、根据本实用新型的一些实施例,所述固定平台包括:固定台面、固定杆和固定框架;所述固定台面表面两侧固定设置有竖杆,所述竖杆活动连接所述固定框架,所述固定杆两端活动连接所述固定框架。所述固定框架用于对水平放置的金属板进行固定,所述固定杆用于对竖直放置的金属板进行固定,对不同厚度的金属板固定时,可对所述固定框架、所述固定杆位置进行调节,其适应性更广固定方便,并且更加稳定,同时所述固定平台设计与所述焊接机构相适配,更方便了所述焊接机构对待焊接的金属板的焊缝信息进行采集判断,并进行焊接。
13、根据本实用新型的一些实施例,所述第一横向传动机构和所述第二横向传动机构包括:基座、第一支撑杆和第一丝杆;所述基座固定设置于所述支撑平台表面两端,所述第一支撑杆固定连接所述基座,所述第一丝杆活动连接所述基座,所述第一丝杆一端穿过所述基座。所述执行机构包括:第一步进电机、传动齿轮轴、轴承座和从动齿轮轴,所述第一步进电机和所述轴承座固定设置于所述支撑平台,所述第一步进电机固定连接所述传动齿轮轴,所述传动齿轮轴与所述从动齿轮轴直齿轮啮合连接,所述从动齿轮轴穿过所述轴承座,所述从动齿轮轴末端斜齿轮与所述第一丝杆一端斜齿轮啮合。所述基座和所述第一支撑杆设置,使其可以承受住更重的金属板,所述第一丝杆及所述执行机构设置可以使固定平台实现同步横向移动。
14、根据本实用新型的一些实施例,所述竖向传动机构包括:第一连接件、第二连接件、第二步进电机、第二支撑杆和第二丝杆;所述第一连接件活动连接所述第一横向传动机构,所述第二连接件活动连接所述第二横向传动机构,所述第二支撑杆一端固定连接所述第一连接件,所述第二支撑杆另一端固定连接所述第二连接件,所述第二丝杆一端活动连接所述第一连接件,所述第二丝杆另一端活动连接所述第二连接件,所述第二步进电机固定设置于第二连接件表面;且所述第二步进电机输出轴固定连接所述第二丝杆;所述第一连接件呈梯台型,所述第一连接件与第二连接件结构相同。所述竖向传动机构的设置可以使固定平台实现竖向移动。
15、根据本实用新型的一些实施例,所述升降传动机构包括:升降平台、t型换向器、蜗轮螺母升降装置和第三步进电机;所述升降平台活动连接所述竖向传动机构;所述升降平台表面两端固定连接所述蜗轮螺母升降装置,所述升降平台表面中部固定连接所述t型换向器,所述t型换向器传动杆两端与所述蜗轮螺母升降装置啮合连接;所述t型换向器固定连接所述第三步进电机,所述第三步进电机固定设置于所述升降平台表面;所述蜗轮螺母升降装置的第三丝杆一端固定连接所述固定平台,所述固定平台与升降平台相互平行。通过所述升降传动机构设置,使所述固定平台在垂直方向移动,实现不同高度的定位。
16、本实用新型的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本实用新型的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!