一种去机头纱装置的制作方法
1.本实用新型涉及机械设备技术领域,特别是涉及一种去机头纱装置。
背景技术:
2.玻纤绕制车间中,需要人工去机头纱操作。自动化程度低,无法满足目前的生产需求。
技术实现要素:
3.针对上述现有技术的不足,本专利申请所要解决的技术问题是如何提供一种可靠性高,结构简单实用,自动化程度高的去机头纱装置。
4.为了解决上述技术问题,本实用新型采用了如下的技术方案:
5.一种去机头纱装置,包括定位导向块、上下移动滑轨、前后移动直线模组、勾刀运动直线模组、刮刀运动直线模组、旋转机构、视觉定位摄像机、勾刀机构和刮刀机构;所述定位导向块与机头固定连接,且定位导向块正对机头的两个缺口设置有让位口;
6.所述上下移动滑轨上的上下移动滑块与前后移动直线模组固定,所述前后移动直线模组上的前后滑动组件上固定有支臂,所述旋转机构安装在支臂上且旋转机构与转台连接,所述支臂通过连接座固定有视觉定位摄像机;所述转台的两端分别固定有勾刀基座和刮刀基座,勾刀运动直线模组和刮刀运动直线模组分别安装在勾刀基座和刮刀基座上,所述勾刀运动直线模组和刮刀运动直线模组分别与勾刀机构和刮刀机构连接,所述勾刀机构和刮刀机构分别用于驱动勾刀和刮刀动作。
7.其中,所述旋转机构包括动力箱,所述动力箱的外侧固定有驱动电机,所述驱动电机的输出轴穿过动力箱且固定有齿轮,所述动力箱转动有轴套,所述轴套位于动力箱内的端部固定有能够与齿轮啮合的外齿圈,所述轴套位于动力箱外的端部与转台固定连接,所述动力箱正对连接座设置有穿孔。
8.其中,所述勾刀机构包括勾刀支座,所述勾刀支座上设置有勾刀滑槽,所述勾刀滑槽内滑动有勾刀滑杆,所述勾刀直线运动模组的勾刀滑动组件通过勾刀滑块与勾刀滑杆固定连接,所述勾刀滑杆铰接有勾刀臂,所述勾刀臂铰接有勾刀,所述勾刀与勾刀支座铰接。
9.其中,所述刮刀机构包括刮刀支座,所述刮刀支座上设置有刮刀滑槽,所述刮刀滑槽内滑动有刮刀滑杆,所述刮刀直线运动模组的刮刀滑动组件通过刮刀滑块与刮刀滑杆固定连接,所述刮刀滑杆铰接有刮刀臂,所述刮刀臂铰接有刮刀,所述刮刀与刮刀支座铰接,且刮刀支座正对刮刀设置有刮刀槽。
10.其中,所述定位导向块的周向分布有插孔,所述转台固定有导向座,所述导向座上固定安装有能够与插孔插接配合的导向杆。
11.其中,所述勾刀支座和刮刀支座分别对应勾刀滑动组件和刮刀滑动组件设置有限位台。
12.综上,本实用新型具有以下有益效果:
13.1、本装置实现了去机头纱的无人自动化;
14.2、本装置成本底,易于推广,为卸纱机器人升级,提供了技术支持;
15.3、本装置的寿命长、结构简单,对精度要求不高,易于加工和制造。
附图说明
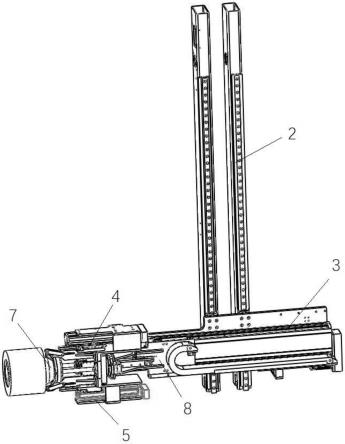
16.图1为本实用新型所述的一种去机头纱装置的结构示意图。
17.图2为图1去掉上下移动滑轨和前后移动直线模组的结构示意图。
18.图3为图2的部分示意图。
19.图4为转台与旋转机构的示意图。
具体实施方式
20.下面结合附图对本实用新型作进一步的详细说明。在本实用新型的描述中,需要理解的是,方位词如“上、下”和“顶、底”等所指示的方位或位置关系通常是基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,在未作相反说明的情况下,这些方位词并不指示和暗示所指的装置或元件必须具有特定的方位或者以特定的方位构造和操作,因此不能理解为对本实用新型保护范围的限制;方位词“内、外”是指相对于各部件本身的轮廓的内外。
21.如图1-4所示,一种去机头纱装置,包括定位导向块1、上下移动滑轨2、前后移动直线模组3、勾刀运动直线模组4、刮刀运动直线模组5、旋转机构、视觉定位摄像机6、勾刀机构和刮刀机构;所述定位导向块与机头7固定连接,且定位导向块正对机头的两个缺口设置有让位口;
22.所述上下移动滑轨上的上下移动滑块与前后移动直线模组固定,所述前后移动直线模组上的前后滑动组件上固定有支臂8,所述旋转机构安装在支臂上且旋转机构与转台9连接,所述支臂通过连接座10固定有视觉定位摄像机;所述转台的两端分别固定有勾刀基座11和刮刀基座12,勾刀运动直线模组和刮刀运动直线模组分别安装在勾刀基座和刮刀基座上,所述勾刀运动直线模组和刮刀运动直线模组分别与勾刀机构和刮刀机构连接,所述勾刀机构和刮刀机构分别用于驱动勾刀13和刮刀14动作。
23.本实施例中,所述旋转机构包括动力箱15,所述动力箱的外侧固定有驱动电机16,所述驱动电机的输出轴穿过动力箱且固定有齿轮17,所述动力箱通过轴承转动有轴套18,所述轴套位于动力箱内的端部固定有能够与齿轮啮合的外齿圈19,所述轴套位于动力箱外的端部与转台固定连接,所述动力箱正对连接座设置有穿孔。
24.本实施例中,所述勾刀机构包括勾刀支座20,所述勾刀支座上设置有勾刀滑槽21,所述勾刀滑槽内滑动有勾刀滑杆,所述勾刀直线运动模组的勾刀滑动组件通过勾刀滑块23与勾刀滑杆固定连接,所述勾刀滑杆铰接有勾刀臂22,所述勾刀臂铰接有勾刀23,所述勾刀与勾刀支座铰接。
25.本实施例中,所述刮刀机构包括刮刀支座24,所述刮刀支座上设置有刮刀滑槽25,所述刮刀滑槽内滑动有刮刀滑杆,所述刮刀直线运动模组的刮刀滑动组件通过刮刀滑块26与刮刀滑杆固定连接,所述刮刀滑杆铰接有刮刀臂27,所述刮刀臂铰接有刮刀14,所述刮刀与刮刀支座铰接,且刮刀支座正对刮刀设置有刮刀槽。
26.本实施例中,所述定位导向块的周向分布有插孔,所述转台固定有导向座28,所述导向座上固定安装有能够与插孔插接配合的导向杆29。
27.本实施例中,所述勾刀支座和刮刀支座分别对应勾刀滑动组件和刮刀滑动组件设置有限位台。便于对勾刀滑动组件和刮刀滑动组件进行限位。
28.1.原有的机头上有两个缺口,这两个缺口的作用是方便工人去机头纱使用,本技术为了便于定位,对机头进行改造,加装定位导向块,通过视觉定位摄像机对定位导向块进行视觉定位,识别定位导向块的让位口的位置;
29.2.通过导向杆的设置,使得本装置与机头加装的定位导向块进行对接;
30.3.通过旋转机构的设置,便于将机头进行回正;
31.4.通过勾刀机构的设置,结合勾刀直线运动模组,模拟人工动作将机头纱割断;
32.5.通过刮刀机构的设置,结合刮刀直线运动模组,模拟人工动作将机构纱从机头刮落。
33.具体流程:
34.1.卸纱机器人带动本装置运动到指定位置,通过plc控制上下移动滑轨,将本装置调整至机头中心水平高度;
35.2.通过前后移动直线模组将本装置向前推进一定距离;
36.3.通过视觉定位摄像机进行二次定位,判断机头的位置和旋转角度;
37.4.通过旋转机构,将本装置旋转至对应角度,具体的,通过电机带动齿轮旋转,进而通过齿轮与外齿圈的啮合带动轴套和转台转动;
38.5.通过前后移动直线模组,将本装置向前推动到位,将定位杆插入定位导向块的插孔内,实现对接;
39.6.通过旋转机构,将机头位置旋转修正至指定角度;
40.7.勾刀运动直线模组带动勾刀机构运动,勾刀机构的勾刀勾住机头纱;
41.8.前后移动直线模组向后移动,通过勾刀割断机头纱;
42.9.刮刀运动直线模组带动刮刀机构运动,刮刀机构的刮刀刮住被勾刀割断的机头纱;
43.10.前后移动直线模组向后移动,将纱线从机头刮出,刮刀直线运动模组动作,刮刀机构放开被刮出的纱线,完成去机头纱的过程;
44.11.装置复位。
45.使用勾刀机构和刮刀机构,能够顺利进入原有机头上的两个缺口实现割断纱线和刮出纱线的目的,需将本装置与机头进行对接定位,通过旋转机构,使得勾刀机构和刮刀机构旋转至缺口对应位置,之后勾刀机构和刮刀机构可以顺利进入缺口进行动作。勾刀进行开刃口,便于勾断纱线。刮刀不开刃口,便于刮住纱线。
46.最后应说明的是:本领域的技术人员可以对本实用新型进行各种改动和变型而不脱离本实用新型的精神和范围。这样,倘若本实用新型的这些修改和变型属于本实用新型权利要求及其等统计数的范围之内,则本实用新型也意图包含这些改动和变型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1