一种钢结构立架辅助扶立焊接装置的制作方法
1.在对车间进行架设过程中,需要使用大量钢结构立架,现有钢结构立架进行安装过程中,需要使用吊机对立架进行依次起吊运输,会大大降低施工效率,在对桁架进行吊装后,还需要焊接工人依次爬升至立架顶部对立架与桁架交界处进行焊接,重复爬升上下会延长工作时长。
2.基于上述,现需要一种钢结构立架辅助扶立焊接装置,以便于在将立架进行卸料时快速将立架运输至基座处,以便于对立架进行扶立过程中对立架侧面进行支撑围护,防止其倾倒,以便于使用者快速对立架与桁架交界处进行焊接。
3.于是,有鉴于此,针对现有结构及缺陷予以进行研究改良,提供一种钢结构立架辅助扶立焊接装置,以期达到更加具有实用性的目的。
背景技术:
4.在对车间进行架设过程中,需要使用大量钢结构立架,现有钢结构立架进行安装过程中,需要使用吊机对立架进行依次起吊运输,会大大降低施工效率,在对桁架进行吊装后,还需要焊接工人依次爬升至立架顶部对立架与桁架交界处进行焊接,重复爬升上下会延长工作时长。
5.基于上述,现需要一种钢结构立架辅助扶立焊接装置,以便于在将立架进行卸料时快速将立架运输至基座处,以便于对立架进行扶立过程中对立架侧面进行支撑围护,防止其倾倒,以便于使用者快速对立架与桁架交界处进行焊接。
6.于是,有鉴于此,针对现有结构及缺陷予以进行研究改良,提供一种钢结构立架辅助扶立焊接装置,以期达到更加具有实用性的目的。
技术实现要素:
7.有鉴于此,本发明提供一种钢结构立架辅助扶立焊接装置,将爬升座控制移动至立架主体顶部后,通过控制往复丝杠运转,可以使其滚珠螺母座带动焊枪进行横向移动,通过控制伺服电机运转,可以使其转轴带动焊枪前端角度进行调整,可以对立架主体和桁架交界处进行预焊接。
8.本发明提供了一种钢结构立架辅助扶立焊接装置,具体包括:立架主体、托架、混凝土基座和爬升座;所述立架主体底部固定连接有底座;所述托架设置于立架主体底部;所述混凝土基座设置于地面内部;所述爬升座通过滑动连接设置于立架主体外侧;所述托架底部通过转动连接设置有带锁止万向轮,托架数量设置为二组;所述托架后侧立面处固定连接有套杆,托架底部固定连接有滑条,滑条底部通过滑动连接设置有齿条架,齿条架前端固定连接有弹簧杆a,弹簧杆a顶部与托架底部固定连接,齿条架后端固定连接有拉杆,拉杆后端通过转动连接设置有连杆,连杆后端通过转动连接设置有摇柄,摇柄转动连接于托架底部内侧;所述托架底部通过转动连接设置有从动齿轮;所述托架顶部左右两侧固定连接有框架,框架顶部固定连接有斜支板,框架内侧通过转动连接设置有限位块,限位块顶部固
定连接有内扭簧,限位块与从动齿轮同轴连接。
9.可选地,所述托架内部开设有管槽,管槽内侧通过转动连接有联动齿轮,联动齿轮顶部设置有减速器,减速器顶部转动连接有手轮。
10.可选地,所述托架左右两侧固定连接有垫块,托架左侧通过转动连接设置有拖拉柄,拖拉柄外侧固定连接有扭簧,扭簧右端与托架左侧立面固定连接。
11.可选地,所述托架前端固定连接有套管,套杆滑动连接于套管内侧。
12.可选地,所述管槽内侧通过滑动连接设置有内杆,内杆侧面开设有侧槽,侧槽内侧固定连接有联动齿条,联动齿条与联动齿轮啮合传动,内杆前端固定连接有横轴a,横轴a左右两端固定连接有锥面片。
13.可选地,所述内杆外侧固定连接有挡板,挡板底部固定连接有螺纹管,螺纹管内侧通过螺纹连接设置有螺纹杆,挡板内侧通过滑动连接设置有滑杆,滑杆底部固定连接有支撑座,支撑座顶部于螺纹杆转动连接。
14.可选地,所述托架左右两侧通过转动连接有转杆,转杆前端通过转动连接设置有有侧套,侧套左右两侧固定连接有斜面板,侧套前端立面处固定连接有横柄,侧套侧端与转杆交界处设置有搭扣。
15.可选地,所述爬升座底部固定连接有往复丝杠,往复丝杠滚珠螺母座底部固定连接有伺服电机,伺服电机转轴处通过同轴连接设置有焊枪,焊枪侧端固定连接有摄像头,爬升座底部固定连接有焊机,爬升座左右两侧固定连接有电动推杆,电动推杆伸缩部内侧端固定连接有橡胶面履带,橡胶面履带转轴底部通过同轴连接设置有锥齿轮,电动推杆伸缩部内侧端固定连接有方套,方套外侧固定连接有电机,方套内侧通过转动连接有内齿轮,方套内部固定连接有支撑管,支撑管内侧通过滑动连接设置有支撑齿条,支撑齿条外侧开设有限位槽,支撑管滑动连接于限位槽内侧,支撑齿条顶部固定连接有滚轮座,滚轮座底部固定连接有限位杆,限位杆滑动连接于支撑管内侧,方套内侧立面处通过转动连接有侧轮。
16.可选地,所述爬升座侧面固定连接有电机,爬升座外侧设置有遥控器,电机转轴右侧通过同轴连接设置有横轴b,横轴b左右两侧通过同轴连接设置有锥齿轮,爬升座内部左右两侧通过转动连接有锥齿轮轴杆,锥齿轮轴杆顶部与底部通过同轴连接设置有锥齿轮,横轴b内部锥齿轮与锥齿轮轴杆底部锥齿轮啮合传动,爬升座内部通过转动连接有棱槽管外侧通过同轴连接设置有锥齿轮,锥齿轮轴杆顶部锥齿轮与棱槽管外侧锥齿轮啮合传动,棱槽管内部套接有棱杆,棱杆内部端通过同轴连接设置有锥齿轮,棱杆内部锥齿轮与橡胶面履带转轴处的锥齿轮啮合传动。
17.可选地,所述爬升座后端固定连接有垂直管,垂直管内部套接有弹簧杆b,弹簧杆b底部通过导线与焊机接线柱相连接,弹簧杆b顶部通过转动连接设置有支撑滚珠。
有益效果
18.根据本发明的各实施例的焊接装置与传统焊接装置相比,使用吊机将立架进行卸料时,使用者可以握住拖拉柄对托架进行拖动,可以将立架移动至托架顶部内侧,使用者通过转动摇柄,可以通过连杆带动齿条架进行平移,可以使齿条架带动从动齿轮进行转动,可以使从动齿轮带动限位块进行偏转,可以使限位块内侧端对立架主体内侧凹陷处的底部平面进行限位,可以对立架主体进行承接,使用者可以通过托架对立架进行移动,便于将立架
快速运输至混凝土基座处。
19.此外,通过设置支撑座,通过转动手轮,通过内杆带动其前端的横轴a平移至立架主体和底座交界处,可以使支撑座前端对混凝土基座垂直立面进行接触限位,通过转动螺纹杆顶部可以使其带动支撑座向下平移至与地面贴合支撑,将立架顶端吊起时,可以使横轴a对立架主体和底座交界处进行支撑,便于使立架进行转动,可以限定底座向下偏转位置,可以对立架偏转位置进行限定。
20.此外,通过设置侧套,将转杆向前侧翻转后,通过垫块支撑,可以对转杆末端的侧套角度进行固定,使用者可以通过握住横柄对托架进行拖动,通过使用吊机将立架主体顶端吊起,使立架进行竖立后,可以使侧套对立架侧面进行支撑,可以防止立架过度倾斜。
21.此外,通过设置往复丝杠,使用者通过遥控器屏幕对焊枪视角进行观察,将爬升座控制移动至立架主体顶部后,通过控制往复丝杠运转,可以使其滚珠螺母座带动焊枪进行横向移动,通过控制伺服电机运转,可以使其转轴带动焊枪前端角度进行调整,可以对立架主体和桁架交界处进行预焊接,通过弹簧杆b底部弹簧弹性支撑,可以使弹簧杆b顶部的支撑滚珠对立架主体表面进行滚动接触,可以使负极电路与立架主体进行稳定连接。
22.此外,通过设置爬升座,通过遥控器控制爬升座侧面电机运转,可以使其横轴b进行转动,可以使横轴b带动左右两侧的锥齿轮带动锥齿轮轴杆进行同步转动,可以使锥齿轮轴杆带动棱槽管进行转动,可以使棱槽管带动棱杆进行转动,可以使棱杆末端锥齿轮带动橡胶面履带转轴进行传动,可以使左右两侧橡胶面履带进行同步运转,可以使橡胶面履带带动爬升座进行爬升。
附图说明
23.为了更清楚地说明本发明的实施例的技术方案,下面将对实施例的附图作简单地介绍。
24.下面描述中的附图仅仅涉及本发明的一些实施例,而非对本发明的限制。
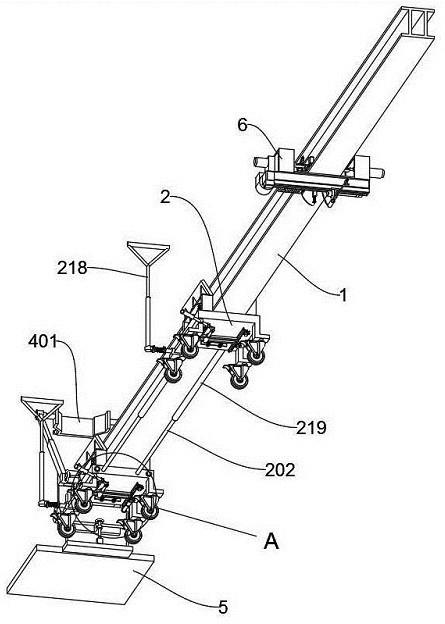
25.在附图中:图1示出了根据本发明的实施例的焊接装置托架的仰视立体结构的示意图;图2示出了根据本发明的实施例图1中a的局部放大的示意图;图3示出了根据本发明的实施例的焊接装置托架左侧的立体结构的示意图;图4示出了根据本发明的实施例图3中c的局部放大的示意图;图5示出了根据本发明的实施例的焊接装置整体的俯视立体结构的示意图;图6示出了根据本发明的实施例图5中d的局部放大的示意图;图7示出了根据本发明的实施例的焊接装置的爬升座的俯视立体拆解结构的示意图;图8示出了根据本发明的实施例的焊接装置的爬升座的仰视立体结构的示意图;图9示出了根据本发明的实施例的焊接装置的爬升座的前侧立体拆解结构的示意图;图10示出了根据本发明的实施例的焊接装置爬升座的俯视立体结构的示意图。
26.附图标记列表1、立架主体;
101、底座;2、托架;201、带锁止万向轮;202、套杆;203、滑条;204、齿条架;205、弹簧杆a;206、拉杆;207、连杆;208、摇柄;209、从动齿轮;210、框架;211、斜支板;212、内扭簧;213、限位块;214、管槽;215、联动齿轮;216、手轮;217、垫块;218、拖拉柄;219、套管;3、内杆;301、侧槽;302、联动齿条;303、横轴a;304、锥面片;305、挡板;3051、螺纹管;306、滑杆;307、支撑座;308、螺纹杆;4、转杆;401、侧套;402、斜面板;403、横柄;5、混凝土基座;6、爬升座;601、往复丝杠;602、伺服电机;603、电动推杆;604、橡胶面履带;605、方套;606、摄像头;607、内齿轮;608、支撑齿条;6081、限位槽;609、支撑管;6091、限位杆;610、滚轮座;611、侧轮;612、锥齿轮轴杆;613、棱槽管;614、棱杆;615、垂直管;616、弹簧杆b;617、支撑滚珠;618、横轴b;7、焊枪;701、焊机。
实施方式
27.为了使得本发明的技术方案的目的、方案和优点更加清楚,下文中将结合本发明的具体实施例的附图,对本发明实施例的技术方案进行清楚、完整的描述。除非另有说明,否则本文所使用的术语具有本领域通常的含义。附图中相同的附图标记代表相同的部件。
28.实施例一:请参考图1至图10:本发明提出了一种钢结构立架辅助扶立焊接装置,包括:立架主体1、托架2、混凝土基座5和爬升座6;立架主体1底部固定连接有底座101;托架2设置于立架主体1底部;混凝土基座5设置于地面内部;爬升座6通过滑动连接设置于立架主体1外侧;托架2底部通过转动连接设置有带锁止万向轮201,托架2数量设置为二组;托架2后侧立面处固定连接有套杆202,托架2底部固定连接有滑条203,滑条203底部通过滑动连接设置有齿条架204,齿条架204前端固定连接有弹簧杆a205,弹簧杆a205顶部与托架2底部固定连接,齿条架204后端固定连接有拉杆206,拉杆206后端通过转动连接设置有连杆207,连杆207后端通过转动连接设置有摇柄208,摇柄208转动连接于托架2底部内侧;托架2底部通过转动连接设置有从动齿轮209;托架2顶部左右两侧固定连接有框架210,框架210顶部固定连接有斜支板211,框架210内侧通过转动连接设置有限位块213,限位块213顶部固定连接有内扭簧212,限位块213与从动齿轮209同轴连接,托架2内部开设有管槽214,管槽214内侧通过转动连接有联动齿轮215,联动齿轮215顶部设置有减速器,减速器顶部转动连接有手轮216,托架2左右两侧固定连接有垫块217,托架2左侧通过转动连接设置有拖拉柄218,拖拉柄218外侧固定连接有扭簧,扭簧右端与托架2左侧立面固定连接,托架2前端固定连接有套管219,套杆202滑动连接于套管219内侧,使用吊机将立架进行卸料时,使用者可以握住拖拉柄218对托架2进行
拖动,可以将立架移动至托架2顶部内侧,使用者通过转动摇柄208,可以通过连杆207带动齿条架204进行平移,可以使齿条架204带动从动齿轮209进行转动,可以使从动齿轮209带动限位块213进行偏转,可以使限位块213内侧端对立架主体1内侧凹陷处的底部平面进行限位,可以对立架主体1进行承接,使用者可以通过托架2对立架进行移动,便于将立架快速运输至混凝土基座5处。
29.如图1至图5所示,管槽214内侧通过滑动连接设置有内杆3,内杆3侧面开设有侧槽301,侧槽301内侧固定连接有联动齿条302,联动齿条302与联动齿轮215啮合传动,内杆3前端固定连接有横轴a303,横轴a303左右两端固定连接有锥面片304,内杆3外侧固定连接有挡板305,挡板305底部固定连接有螺纹管3051,螺纹管3051内侧通过螺纹连接设置有螺纹杆308,挡板305内侧通过滑动连接设置有滑杆306,滑杆306底部固定连接有支撑座307,支撑座307顶部于螺纹杆308转动连接,通过转动手轮216,可以使其带动联动齿轮215带动转动,可以使联动齿轮215带动联动齿条302进行平移,可以使联动齿条302带动内杆3在管槽214内部进行平移,使内杆3带动其前端的横轴a303平移至立架主体1和底座101交界处,可以使支撑座307前端对混凝土基座5垂直立面进行接触限位,通过转动螺纹杆308顶部可以使其带动支撑座307向下平移至与地面贴合支撑,将立架顶端吊起时,可以使横轴a303对立架主体1和底座101交界处进行支撑,便于使立架进行转动,可以限定底座101向下偏转位置。
30.如图3至图6所示,托架2左右两侧通过转动连接有转杆4,转杆4前端通过转动连接设置有侧套401,侧套401左右两侧固定连接有斜面板402,侧套401前端立面处固定连接有横柄403,侧套401侧端与转杆4交界处设置有搭扣,将转杆4向前侧翻转后,通过垫块217支撑,可以对转杆4末端的侧套401角度进行固定,使用者可以通过握住横柄403对托架2进行拖动,通过使用吊机将立架主体1顶端吊起,使立架进行竖立后,可以使侧套401对立架侧面进行支撑,可以防止立架过度倾斜。
31.如图5至图10所示,爬升座6底部固定连接有往复丝杠601,往复丝杠601滚珠螺母座底部固定连接有伺服电机602,伺服电机602转轴处通过同轴连接设置有焊枪7,焊枪7侧端固定连接有摄像头606,爬升座6底部固定连接有焊机701,爬升座6左右两侧固定连接有电动推杆603,电动推杆603伸缩部内侧端固定连接有橡胶面履带604,橡胶面履带604转轴底部通过同轴连接设置有锥齿轮,电动推杆603伸缩部内侧端固定连接有方套605,方套605外侧固定连接有电机,方套605内侧通过转动连接有内齿轮607,方套605内部固定连接有支撑管609,支撑管609内侧通过滑动连接设置有支撑齿条608,支撑齿条608外侧开设有限位槽6081,支撑管609滑动连接于限位槽6081内侧,支撑齿条608顶部固定连接有滚轮座610,滚轮座610底部固定连接有限位杆6091,限位杆6091滑动连接于支撑管609内侧,方套605内侧立面处通过转动连接有侧轮611,通过启动电动推杆603,可以使其伸缩部带动方套605向内侧平移,可以使方套605内侧的侧轮611对立架左右两侧立面进行支撑,通过启动方套605外侧电机,可以使其转轴带动内齿轮607进行转动,可以使内齿轮607带动两侧支撑齿条608向上下两侧移动,可以使滚轮座610末端滚轮对立架主体1左右两侧凹陷处顶部与底部平面进行支撑,可以对爬升座6位置进行定位,将立架使用吊机进行扶立后,通过遥控器控制爬升座6侧面电机运转,可以使其横轴b618进行转动,可以使横轴b618带动左右两侧的锥齿轮带动锥齿轮轴杆612进行同步转动,可以使锥齿轮轴杆612带动棱槽管613进行转动,可以使
棱槽管613带动棱杆614进行转动,可以使棱杆614末端锥齿轮带动橡胶面履带604转轴进行传动,可以使左右两侧橡胶面履带604进行同步运转,可以使橡胶面履带604带动爬升座6进行爬升。
32.如图7至图10所示,爬升座6侧面固定连接有电机,爬升座6外侧设置有遥控器,电机转轴右侧通过同轴连接设置有横轴b618,横轴b618左右两侧通过同轴连接设置有锥齿轮,爬升座6内部左右两侧通过转动连接有锥齿轮轴杆612,锥齿轮轴杆612顶部与底部通过同轴连接设置有锥齿轮,横轴b618内部锥齿轮与锥齿轮轴杆612底部锥齿轮啮合传动,爬升座6内部通过转动连接有棱槽管613外侧通过同轴连接设置有锥齿轮,锥齿轮轴杆612顶部锥齿轮与棱槽管613外侧锥齿轮啮合传动,棱槽管613内部套接有棱杆614,棱杆614内部端通过同轴连接设置有锥齿轮,棱杆614内部锥齿轮与橡胶面履带604转轴处的锥齿轮啮合传动,使用者可以将爬升座6套在立架主体1外侧,爬升座6后端固定连接有垂直管615,垂直管615内部套接有弹簧杆b616,弹簧杆b616底部通过导线与焊机701接线柱相连接,弹簧杆b616顶部通过转动连接设置有支撑滚珠617,使用者通过遥控器屏幕对焊枪7视角进行观察,将爬升座6控制移动至立架主体1顶部后,通过控制往复丝杠601运转,可以使其滚珠螺母座带动焊枪7进行横向移动,通过控制伺服电机602运转,可以使其转轴带动焊枪7前端角度进行调整,可以对立架主体1和桁架交界处进行预焊接,通过弹簧杆b616底部弹簧弹性支撑,可以使弹簧杆b616顶部的支撑滚珠617对立架主体1表面进行滚动接触,可以使负极电路与立架主体1进行稳定连接。
33.本实施例的具体使用方式与作用:本发明中,在使用时,使用吊机将立架进行卸料时,使用者可以握住拖拉柄218对托架2进行拖动,可以将立架移动至托架2顶部内侧,使用者通过转动摇柄208,可以通过连杆207带动齿条架204进行平移,可以使齿条架204带动从动齿轮209进行转动,可以使从动齿轮209带动限位块213进行偏转,可以使限位块213内侧端对立架主体1内侧凹陷处的底部平面进行限位,可以对立架主体1进行承接,使用者可以通过托架2对立架进行移动,便于将立架快速运输至混凝土基座5处,通过转动手轮216,可以使其带动联动齿轮215带动转动,可以使联动齿轮215带动联动齿条302进行平移,可以使联动齿条302带动内杆3在管槽214内部进行平移,使内杆3带动其前端的横轴a303平移至立架主体1和底座101交界处,可以使支撑座307前端对混凝土基座5垂直立面进行接触限位,通过转动螺纹杆308顶部可以使其带动支撑座307向下平移至与地面贴合支撑,将立架顶端吊起时,可以使横轴a303对立架主体1和底座101交界处进行支撑,便于使立架进行转动,可以限定底座101向下偏转位置,将转杆4向前侧翻转后,通过垫块217支撑,可以对转杆4末端的侧套401角度进行固定,使用者可以通过握住横柄403对托架2进行拖动,通过使用吊机将立架主体1顶端吊起,使立架进行竖立后,可以使侧套401对立架侧面进行支撑,可以防止立架过度倾斜,通过启动电动推杆603,可以使其伸缩部带动方套605向内侧平移,可以使方套605内侧的侧轮611对立架左右两侧立面进行支撑,通过启动方套605外侧电机,可以使其转轴带动内齿轮607进行转动,可以使内齿轮607带动两侧支撑齿条608向上下两侧移动,可以使滚轮座610末端滚轮对立架主体1左右两侧凹陷处顶部与底部平面进行支撑,可以对爬升座6位置进行定位,将立架使用吊机进行扶立后,通过遥控器控制爬升座6侧面电机运转,可以使其横轴b618进行转动,可以使横轴b618带动左右两侧的锥齿轮带动锥齿轮轴杆612进行同步转动,可以使锥齿轮轴杆612带动棱槽管613进行转动,可以使棱槽管613带动棱杆
614进行转动,可以使棱杆614末端锥齿轮带动橡胶面履带604转轴进行传动,可以使左右两侧橡胶面履带604进行同步运转,可以使橡胶面履带604带动爬升座6进行爬升,使用者通过遥控器屏幕对焊枪7视角进行观察,将爬升座6控制移动至立架主体1顶部后,通过控制往复丝杠601运转,可以使其滚珠螺母座带动焊枪7进行横向移动,通过控制伺服电机602运转,可以使其转轴带动焊枪7前端角度进行调整,可以对立架主体1和桁架交界处进行预焊接,通过弹簧杆b616底部弹簧弹性支撑,可以使弹簧杆b616顶部的支撑滚珠617对立架主体1表面进行滚动接触,可以使负极电路与立架主体1进行稳定连接。
34.最后,需要说明的是,本发明在描述各个构件的位置及其之间的配合关系等时,通常会以一个/一对构件举例而言,然而本领域技术人员应该理解的是,这样的位置、配合关系等,同样适用于其他构件/其他成对的构件。以上所述仅是本发明的示范性实施方式,而非用于限制本发明的保护范围,本发明的保护范围由所附的权利要求确定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1