一种轨道交通铝板自动安装设备及其安装方法与流程
本发明涉及自动安装领域,具体为一种轨道交通铝板自动安装设备及其安装方法。
背景技术:
1、轨道交通是指运营车辆需要在特定轨道上行驶的一类交通工具或运输系统,常见的轨道交通有传统铁路(普通铁路、城际铁路和市域铁路)、地铁、轻轨和有轨电车,此外还有磁悬浮轨道系统、单轨系统等新型轨道交通,轨道交通的发展越来越多元,数量也越来越多,随着轨道交通的发展,对轨道交通铝板的安装效率也提出了新要求。
2、中国专利(cn202111139222.8)公开了一种轨道交通站台的斜向大面积铝板装配式安装设计结构,铝板的上端安装在固定杆上,铝板的下端通过弹性止挡机构安装到位,铝板之间通过齿条卡接到位。
3、图像识别是指计算机摄像头识别和检测数字图像或视频中的物体或特征的能力,它是一种捕捉、处理、检查和理解图像的方法,基于对象的形状、大小、颜色等特征,根据这些特征来分析识别图像中的物体。
4、现有的轨道交通铝板安装需要多人配合,安装效率低,人工费用高,铝板安装后还需要对其进行平整度调整,从而导致铝板安装费时、费工,且对安装工人的操作精度要求高,最终难以保证施工质量及施工工期。
技术实现思路
1、本发明的目的在于提供一种轨道交通铝板自动安装设备及其安装方法,用于轨道交通铝板的自动安装并调平,以解决上述背景技术中出现的问题。
2、为了解决上述技术问题,本发明提供如下技术方案:
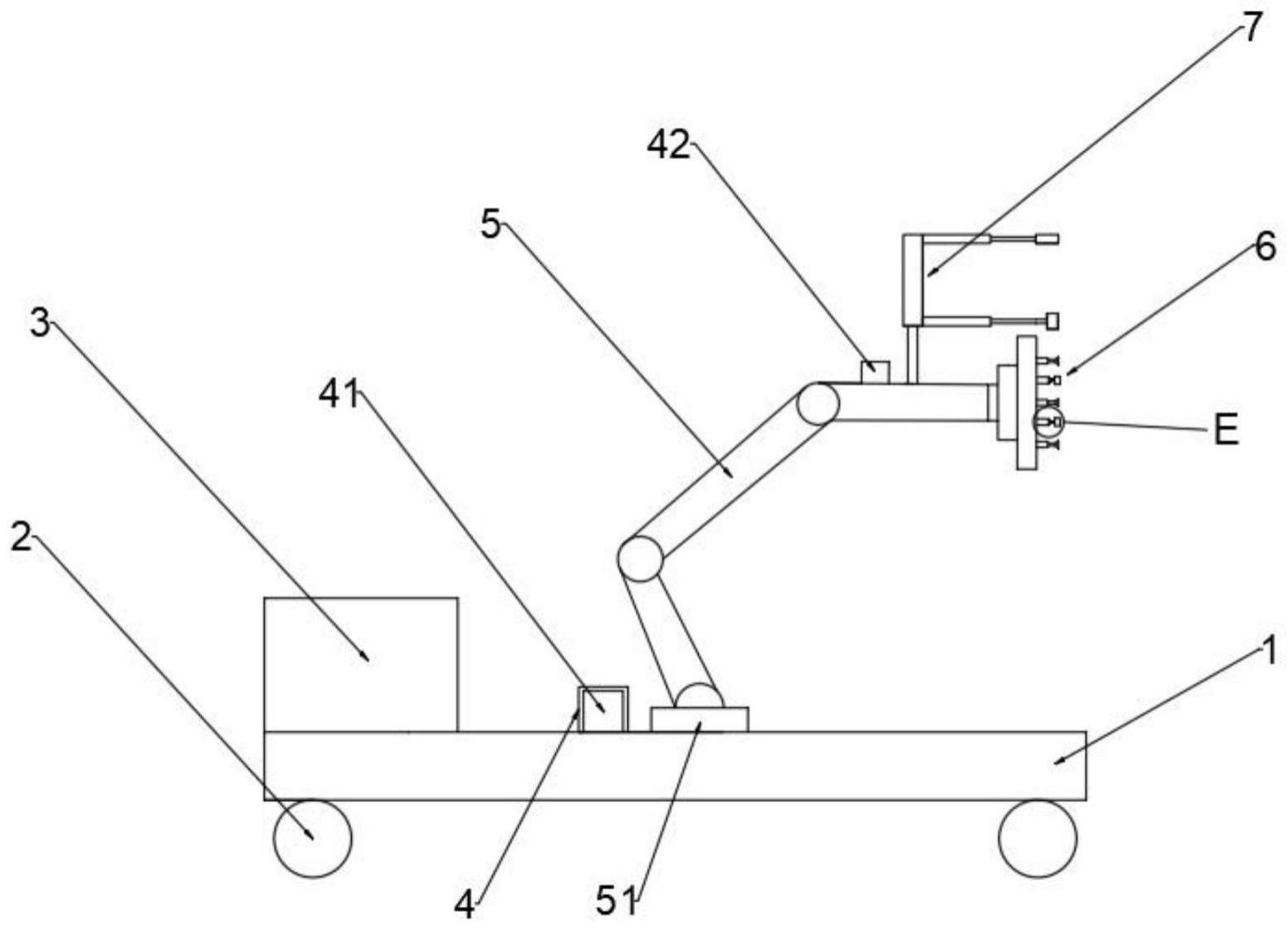
3、一种轨道交通铝板自动安装设备包括车体、车轮、储存机构、控制机构、机械臂、吸取机构和定位机构,车体下方对称设有车轮,储存机构与车体紧固连接,控制机构与车体紧固连接,机械臂与车体紧固连接,机械臂与控制机构电连接,吸取机构与机械臂紧固连接,定位机构与机械臂紧固连接,定位机构与控制机构电连接。
4、车体是主要的安装基础,车轮可带动车体移动,车体上固定有储存机构,用于铝板的放置,控制机构用于给机械臂和吸取机构提供信号,控制其移动方向,吸取机构用于吸取铝板,机械臂用来带动吸取机构移动,从而带动吸取机构吸取的铝板运动至安装位,定位机构以机械臂为安装基础,定位机构可以识别铝板是否安装到位,从而传递信号给控制机构,进一步控制吸取机构进行微调。
5、进一步的,储存机构包括壳体、底板和液压杆,壳体与车体紧固连接,液压杆与车体紧固连接,液压杆位于壳体内,底板与液压杆紧固连接,液压杆伸缩方向为竖直方向,底板与壳体滑动连接,底板位于壳体内。
6、铝板放置在壳体内的底板上,液压杆为底板提供动力,液压杆可推动底板在壳体内向上移动,从而带动置于底板上的铝板向上移动,可以保证铝板始终在壳体内位于上端,便于吸取和清洁。
7、进一步的,储存机构还包括滑轨、清洁杆、移动块和气缸,滑轨与壳体紧固连接,滑轨对称位于壳体上,移动块与滑轨滑动连接,气缸与壳体紧固连接,气缸对称置于壳体上,气缸伸缩方向为水平方向,移动块与气缸传动连接,清洁杆与移动块紧固连接,清洁杆上设有毛刷。
8、气缸以壳体为安装基础,为清洁杆提供动力,气缸动作,从而推动移动块在滑轨上滑动,从而带动与移动块固定连接的清洁杆移动,从而实现清洁杆在壳体上往复运动,清洁杆上设有毛刷,可以清洁铝板表面,保证整洁。
9、进一步的,控制机构包括控制盒和ccd相机,控制盒与车体紧固连接,控制盒与机械臂电连接,ccd相机与机械臂紧固连接,ccd相机与控制盒电连接,ccd相机朝向工作方向。
10、ccd相机安装在机械臂上,ccd相机朝向工作方向,ccd相机对铝板安装位置进行拍照取像,控制盒可对图像数据进行图像处理,并进行位置运算来判断铝板的实际位置,并通过与之前设定的基准位置进行对比,计算出铝板的实际偏移值,从而控制机械臂带动铝板运动,使得铝板运动到之前设定的基准位置上,以达到铝板自动对位。
11、进一步的,机械臂包括安装座、臂体和臂座,安装座与车体紧固连接,臂体与安装座紧固连接,臂座与臂体紧固连接,臂座位于臂体顶端。
12、安装座固定在车体上,给机械臂一个稳定的工作平台,臂座位于臂体顶端,用于吸取机构的安装。
13、进一步的,吸取机构包括旋转座、底座、第一推杆、第二推杆、吸盘、激光发生器和弹簧,旋转座与臂座转动连接,旋转座与底座紧固连接,第一推杆与底座紧固连接,吸盘与第一推杆紧固连接,第二推杆与底座紧固连接,弹簧与第二推杆紧固连接,激光发生器与弹簧紧固连接。
14、旋转座可在臂座上转动,从而带动底座转动,从而带动吸取铝板的转动,第一推杆动作,带动吸盘运动,吸盘和第一推杆在底座上布置有多个,每个第一推杆都可单独动作,从而带动吸盘动作,实现吸附在吸盘上的铝板多角度微调,第二推杆运动可以带动激光发生器贴向铝板,弹簧可保证激光发生器与铝板贴合紧密,保证识别的准确性。
15、进一步的,定位机构包括第一伸缩杆、第二伸缩杆、第三伸缩杆、护罩、光敏电阻、接收系统和支架,第一伸缩杆的一端与臂体紧固连接,第一伸缩杆远离臂体的一端与支架紧固连接,第二伸缩杆与支架紧固连接,护罩与第二伸缩杆紧固连接,护罩采用橡胶材料,光敏电阻与护罩紧固连接,光敏电阻位于护罩内,光敏电阻与控制盒电连接,第三伸缩杆与支架紧固连接,接收系统与第三伸缩杆紧固连接,接收系统位于远离支架的一端。
16、第一伸缩杆动作,从而带动支架移动,进而带动固定在支架上的第二伸缩杆和第三伸缩杆移动,第二伸缩杆动作,带动护罩向两块铝板之间的缝隙移动,护罩采用橡胶材料,可以紧密贴合在铝板上,使得位于护罩内的光敏电阻识别更准确,两块铝板之间的缝隙大小可通过光敏电阻的电阻变化来识别,光敏电阻的电阻变化产生一个电信号,传递给控制盒,接收系统位于第三伸缩杆顶端,第三伸缩杆运动,带动接收系统贴近铝板,用于接收激光发生器发出的激光,从而识别两块铝板之间是否平整。
17、进一步的,接收系统包括盒体、导轨、滑块、激光接收器、限位块和第三推杆,盒体与第三伸缩杆紧固连接,导轨与盒体紧固连接,导轨位于盒体内,滑块与导轨滑动连接,激光接收器与滑块紧固连接,激光接收器与第三推杆紧固连接,限位块与盒体紧固连接,限位块位于远离第三推杆的一端。
18、激光接收器固定在滑块上,当第三推杆推动激光接收器运动时,激光发生器会沿着滑轨方向运动,激光接收器在上下移动的过程中,若在远离限位块的位置接收到激光,说明安装的铝板未对齐,激光接收器在贴近限位块的位置接收到激光,说明安装铝板已对齐。
19、与现有技术相比,本发明所达到的有益效果是:储存机构中的清洁杆可自动对铝板进行清洁,保证安装过程中的整洁,车轮可带动车体移动,便于铝板的批量安装,ccd相机可对安装过程进行图像采集,通过控制盒对图像信号进行分析,实现自动对位,定位机构可对铝板安装位置进行监测,通过光敏电阻这一结构实现对两块铝板之间的缝隙大小进行检测,结构简单可靠,激光发生器和激光接收器可对两块铝板之间的平整度进行检测,精度高,识别快速,通过吸取机构中的第一推杆对铝板进行进一步的微调,确保两块铝板之间安装到位,本发明可实现一人即可实现铝板的安装,提高了安装效率,且安装精度高,保证了施工质量。
- 还没有人留言评论。精彩留言会获得点赞!