一种阀门轴类部件装配机器人及其装配方法
本发明涉及工业机器人,具体为一种阀门轴类部件装配机器人及其装配方法。
背景技术:
1、阀门(valve)是控制流动的流体介质的流量、流向、压力、温度等的机械装置,阀门是管道系统中基本的部件。阀门管件在技术上与泵一样,常常作为一个单独的类别进行讨论。阀门可用手动或者手轮,手柄或踏板操作,也可以通过控制来改变流体介质的压力,温度和流量变化。阀门可以对这些变化进行连续或重复的操作,比如在热水系统或蒸汽锅炉安装的安全阀。
2、目前阀门轴类部件的装配均以手工装备为主,部分大型生产线存在设备成本高、结构复杂、故障率高、占地空间大等不足。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本发明提供了一种阀门轴类部件装配机器人及其装配方法,解决了目前阀门轴类部件的装配均以手工装备为主,部分大型生产线存在设备成本高、结构复杂、故障率高、占地空间大等不足的问题。
3、(二)技术方案
4、为实现以上目的,本发明通过以下技术方案予以实现:
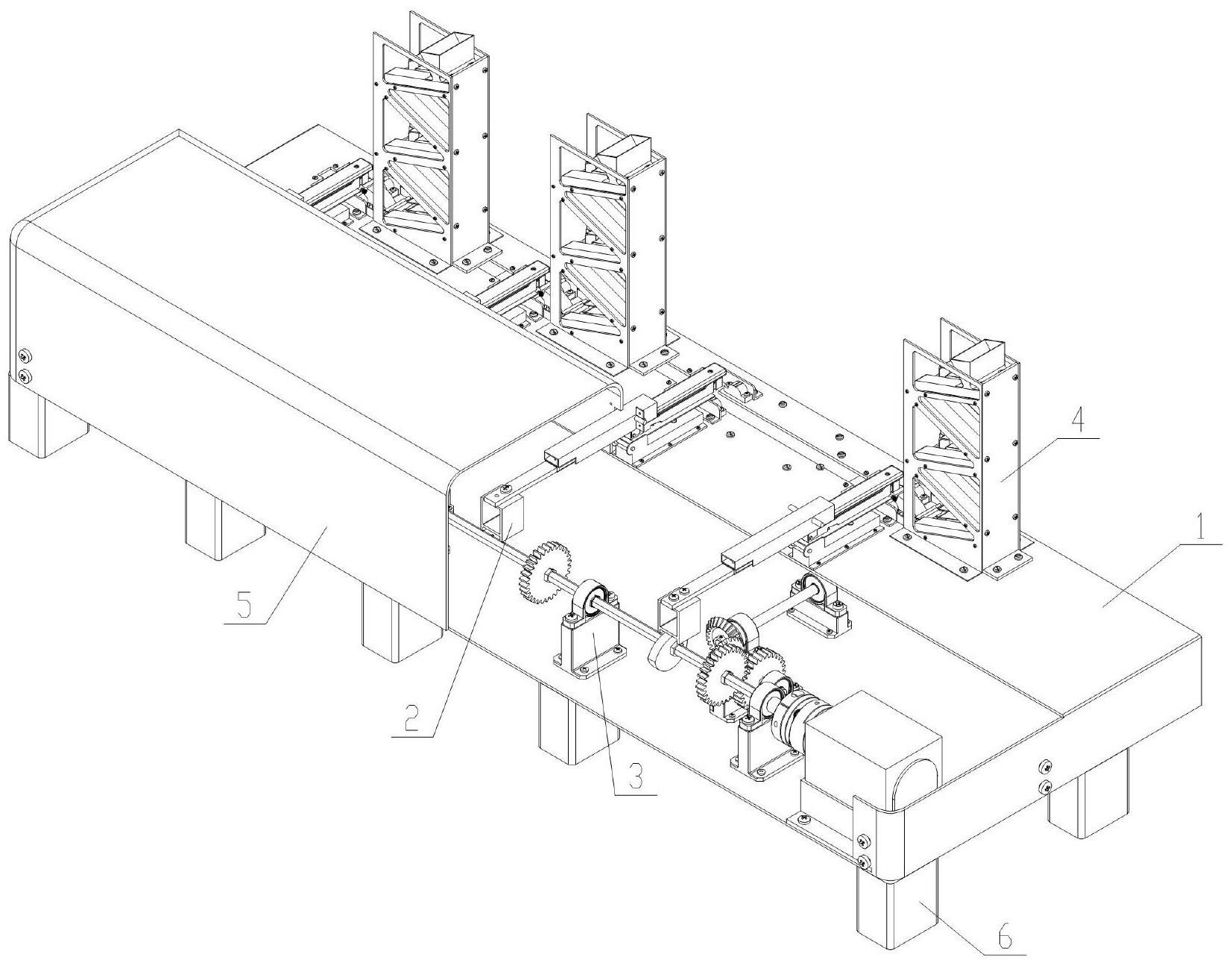
5、第一方面,提供了一种阀门轴类部件装配机器人,包括工作台和固定安装在所述工作台侧面的壳体,所述工作台内部安装有传动装置,所述工作台下方安装有支腿和料仓ⅲ,所述工作台表面安装有轴装配装置和料仓ⅰ,所述料仓ⅰ位于轴装配装置进料口前侧,所述料仓ⅲ位于轴装配装置出料口后侧;
6、所述轴装配装置包括弹簧盖板和固定安装在所述工作台表面的底座ⅰ,所述弹簧盖板端部与底座ⅰ端部之间转动连接,所述弹簧盖板中部与底座ⅰ中部之间固定连接有弹簧ⅰ,所述弹簧盖板表面固定安装有料仓底板,所述料仓底板内部安装有料仓ⅱ和弹射机构,所述料仓ⅱ位于所述弹射机构外侧且构成滑动副,所述料仓底板上部安装有杠杆机构且构成转动副;
7、所述料仓ⅱ包括滑动安装在所述料仓底板内部的料盒ⅱ,所述料盒ⅱ内部固定连接有弹簧支撑,所述弹簧支撑内部固定安装有弹簧架,所述弹簧支撑上方滑动连接有挡圈顶板,所述弹簧架上套设有弹簧ⅱ,所述弹簧ⅱ的一端固定连接在所述料盒ⅱ上,所述弹簧ⅱ另一端固定连接在所述挡圈顶板上。
8、优选的,所述杠杆机构包括按压头盖、按压头、料仓盖、支点板、连接板、凸轮板、支点轴以及连接扣,所述料仓盖转动安装在所述料仓底板上部,所述按压头尾部由弹性结构构成,一端顶在所述料仓盖上,另一端顶在所述按压头盖上,所述按压头盖与凸轮板通过所述连接板固定连接,所述支点板固定连接在所述按压头盖上部,所述支点轴与支点板同轴连接,所述支点轴与壳体之间通过连接扣固定连接。
9、优选的,所述弹射机构包括导向针、滑槽、弹簧ⅲ以及固定杆,所述导向针一端与料仓底板转动连接,所述导向针另一端与滑槽滑动连接,所述滑槽滑动连接在所述料仓底板内部;所述弹簧ⅲ一端顶在所述滑槽上,另一端顶在所述料盒ⅱ上,所述固定杆位于所述料仓ⅱ下方,所述固定杆内轴和所述滑槽转动连接;所述固定杆倒钩和料仓ⅱ挤压接触,所述平衡料仓ⅱ工作时弹簧ⅲ对料仓ⅱ有弹力;所述固定杆外轴和料仓底板接触连接且构成滑动副。
10、优选的,所述传动装置包括电机、联轴器ⅰ、总轴、轴承ⅰ、主动齿轮、凸轮306、齿轮轴、被动齿轮、轴承ⅱ、锥齿轮ⅰ、锥齿轮ⅱ、锥齿轮轴、槽轮、拨盘、槽轮轴、联轴器ⅱ、轴承ⅲ、传动轮、承重台、定位板以及传动轮轴,所述电机固定安装在工作台内,所述总轴通过联轴器ⅰ安装在所述电机输出端上,所述总轴通过联轴承ⅰ安装在工作台上,所述总轴上安装有主动齿轮和凸轮,所述被动齿轮通过齿轮轴安装在工作台上,所述被动齿轮与主动齿轮啮合,所述齿轮轴上安装有锥齿轮ⅰ,所述锥齿轮轴通过轴承ⅱ安装在工作台上,所述锥齿轮轴上安装有锥齿轮ⅱ和拨盘,所述锥齿轮ⅱ与锥齿轮ⅰ啮合,所述传动轮轴通过轴承ⅲ安装在工作台上,所述槽轮轴通过联轴器ⅱ安装在传动轮轴上,所述槽轮轴上安装有槽轮,所述槽轮和拨盘相适配,所述传动轮轴上安装有传动轮,传动轮两侧安装有称重台和定位板,所述称重台和定位板安装在工作台上。
11、优选的,所述凸轮板与凸轮接触连接,所述弹簧支撑侧面安装有相适配的挡圈,所述弹簧支撑的两侧的斜面与挡圈开口的斜面通过子母结构配合,确保挡圈开口朝下,方便所述料仓ⅱ高效快捷地添加挡圈,所述挡圈用于装配到被装配轴上;
12、所述按压头从相对料仓ⅱ位置最高点运动至相对料仓ⅱ位置最低点时料仓盖旋转角为角c,所述按压头运动至相对料仓ⅱ位置最低点为x点,所述挡圈装配位置最高点为y点,所述按压头运动至相对料仓ⅱ位置最低点与挡圈装配位置最高点垂直距离xy为h1,则相关尺寸满足:
13、h1+l1*tan(c)<h2*l1/l2,且l2>l1
14、其中,l1表示支点轴中心轴与料仓盖前端面沿料仓盖长度方向距离,l2表示,支点轴中心轴与凸轮受力点沿连接板长度方向距离,h2表示凸轮最大推程。
15、优选的,所述总轴与槽轮轴转速比为m,所述槽轮槽数为n,则m=n。
16、优选的,所述凸轮包括基圆曲线、等加速曲线以及等减速曲线,所述凸轮基圆半径为r2,基圆曲线对应弧度为90度,所述等加速曲线为升程曲线,所述等加速曲线对应弧度为170度,升程最高点与半径r3的圆相切,且r3=r2+h2;所述等加速曲线与基圆曲线相切;所述回程曲线为等减速曲线,所述等减速曲线对应弧度为100度;所述等减速曲线与基圆曲线相切;所述等加速曲线弧度大于所述等减速曲线弧度。
17、优选的,所述料仓ⅰ包括料仓、两个侧板、后挡板、轴底板、前挡板以及料盒ⅰ,两个所述侧板安装在工作台上,所述料盒ⅰ安装在两个所述侧板之间,所述料盒ⅰ前侧安装有前挡板且后侧安装有后挡板,所述料盒ⅰ上部安装有料仓,料盒ⅰ的各斜坡下分别安装一个轴底板。
18、优选的,所述料仓ⅲ包括挡板和料盒ⅲ,所述挡板安装在工作台,所述料盒ⅲ位于所述挡板下方。
19、又一方面,提供了一种装配方法,包括:
20、进料:被装配轴在重力作用下沿料盒ⅰ平稳下滑进入传动轮凹槽后,电机的转动控制传动轮间歇运动,传动轮的转动控制被装配轴转动到承重台位置时,被装配轴进入承重台凹槽处;挡圈被挡圈顶板压到料盒ⅱ顶部,上一个挡圈装配完成后,弹簧ⅱ的弹力将下一个挡圈推到料盒ⅱ顶部;工作状态时,水平按压料盒ⅱ时,滑槽水平运动,使导向针活动端在滑槽凹槽其中一个内角顶端,料盒ⅱ与固定杆倒钩分离,固定杆外轴与料仓底板分离;撤去外力后,滑槽水平运动,使导向针活动端滑出滑槽凹槽,弹簧ⅲ提供弹力将料仓ⅱ由料仓底板弹射出;添加挡圈后,水平按压料盒ⅱ,滑槽水平运动,使导向针活动端在滑槽凹槽另一个内角顶端,料盒ⅱ后板运动至固定杆倒钩后侧;撤去外力后,滑槽水平运动,使导向针活动端在滑槽凹槽内两个内角组成的夹角处,固定杆倒钩与料盒ⅱ后板挤压接触,固定杆外轴与料仓底板接触;
21、装配:电机控制凸轮转动,凸轮挤压凸轮板向上运动,通过杠杆机构控制按压头盖向下运动,按压头盖带动按压头向下运动,将挡圈压入被装配轴凹槽完成装配;装配完成后凸轮与凸轮板分离,在按压头的弹力作用下按压头盖复位,在弹簧ⅰ作用下料仓ⅱ复位;
22、出料:装配完成复位后,电机带动传动轮转动,传动轮带动装配后的被装配轴转动掉落到料仓ⅲ内,被装配轴进料过程与出料过程同时进行。
23、(三)有益效果
24、(1)本发明一种阀门轴类部件装配机器人及其装配方法,采用模块化、集成化设计,由多组装配单元平行布置组成,一台原动机拖动多组装配单元动作,可根据需要增减装配单元数量,方便实现产能拓展;弹簧支撑的两侧的斜面与挡圈开口的斜面通过子母结构配合,确保挡圈开口朝下,方便料仓ⅱ高效快捷地添加挡圈。
25、(2)本发明一种阀门轴类部件装配机器人及其装配方法,支点轴中心轴与料仓盖前端面沿料仓盖长度方向距离ab为l1,支点轴中心轴与凸轮受力点沿连接板长度方向距离bc为l2,凸轮最大推程为h2,按压头从相对料仓ⅱ位置最高点运动至相对料仓ⅱ位置最低点时料仓盖旋转角为角c,按压头运动至相对料仓ⅱ位置的最低点与挡圈的最高点垂直距离xy为h1,杠杆机构需满足h1+l1*tan(c)<h2*l1/l2,且l2>l1。上述结构可确保按压省力及挡圈装配所需的按压行程,即确保挡圈被完全压入被装配轴的凹槽内。当按压行程超过挡圈装配行程后,由按压头抵消杠杆机构额外的运动行程。
26、(3)本发明一种阀门轴类部件装配机器人及其装配方法,滑槽随着导向针的转动在料仓底板内滑动,滑槽的凹槽近似“凹”字封闭形,并具有两角a1、a2;角a1大于角a2。上述结构可确保导向针在滑槽的凹槽内沿既定轨道运动,从而实现料仓ⅱ的按压弹出,方便挡圈的存储。
27、(4)本发明一种阀门轴类部件装配机器人及其装配方法,凸轮基圆半径为r2,基圆曲线对应弧度为90度。升程曲线为等加速曲线,等加速曲线对应弧度为170度;升程最高点与半径r3的圆相切,且r3=r2+h2;等加速曲线与基圆曲线相切;回程曲线为等减速曲线,等减速曲线对应弧度为100度;等减速曲线与基圆曲线相切;等加速曲线弧度大于等减速曲线弧度。上述结构可实现凸轮驱动的“慢进急回”,即凸轮驱动按压头下压挡圈时速度较慢,按压平稳,按压结束后按压头复位迅速。
28、(5)本发明一种阀门轴类部件装配机器人及其装配方法,传动轮凹槽为非对称结构,在转动方向一侧设有传动轮圆角,方便被装配轴进出传动轮凹槽;动轮凹槽的相切圆半径为r4,传动轮轴心线与承重台凹槽底垂直距离fg为l3;且l3>r4,从而确保装配按压挡圈时,传动轮不受径向按压力,径向按压力由承重台凹槽承受;上述结构可实现运动传递与承载受力的分离,改善传动轮的受力状态,提高传动轮的使用寿命。
29、(6)本发明一种阀门轴类部件装配机器人及其装配方法,总轴与槽轮轴转速比为m,槽轮槽数为n,且m=n;从而确保当拨盘刚进入槽轮凹槽的时刻,凸轮的受力点恰好位于基圆曲线与等减速曲线的切点。上述结构可实现分段间歇做功,精简系统驱动电机数量,即被装配轴被传送至承重台时,杠杆机构刚好开始向下按压,继而下压挡圈,即实现了槽轮机构对被装配轴的传送工序与杠杆机构对挡圈按压工序的精准联动。
30、(7)本发明一种阀门轴类部件装配机器人及其装配方法,料盒ⅰ采用z型结构,结构紧凑,空间利用率高,存料量大,且被装配轴依靠自重下滑,下滑平缓。
31、(8)本发明一种阀门轴类部件装配机器人及其装配方法,传动轮凹槽相切圆半径为r4,料仓ⅰ出料口底部与传动轮中心轴在垂直方向上的距离fh为l4,且l4<r4,从而确保被装配轴顺利被传动轮凹槽捕获,进而快速传送至传动轮凹槽内部。
- 还没有人留言评论。精彩留言会获得点赞!