一种锻压机床上下料工业机器人的制作方法
本发明涉及上下料机器人领域,具体为一种锻压机床上下料工业机器人。
背景技术:
1、在现代制造业的生产中,都离不开机床作为加工机械装备。机床行业是制造业的基础性行业,也是推动国民经济发展的脊柱行业。而提高机床的生产效率也是行业的重中之重,由此满足生产自动化的上下料机器人也成为了行业的攻关重点。
2、现今,各种高精尖的工业机器人层出不穷。但是,基本都有一个问题,那就是运作核心或部分组件是通过电控的方式工作,这就使得其安装调机要专业人员,维护检修要专业人员且需要较长的时间,设备损毁需要专业人员花费长时间去找到损毁原因并维修。
3、基于此,本发明设计了一种锻压机床上下料工业机器人,以解决上述问题。
技术实现思路
1、本发明的目的为了解决现有的工业机器人安装调机要专业人员,维护检修要专业人员且需要较长的时间,设备损毁需要专业人员花费长时间去找到损毁原因并维修。其人工成本高,遇到故障时,消耗时间多的问题。
2、提供一种锻压机床上下料工业机器人,包括顶盖、支撑装置,其特征在于:还包括运动组件和步进电机,所述运动组件安装在顶盖和支撑装置之间,所述步进电机固定安装在支撑装置外端;
3、所述支撑装置内部中心位置固定安装主轴,所述主轴顶端固定安装顶盖,所述支撑装置底部内侧固定设置顶杆且所述主轴与运动组件转动安装;
4、所述运动组件包括夹手转盘,所述夹手转盘下端中心位置固定安装夹手轴,所述夹手轴下端固定安装夹手齿轮,所述夹手轴转动安装在主轴上;
5、所述夹手轴上转动安装凸轮转台,所述凸轮转台上端固定设有控制夹手夹紧的夹紧凸轮槽,下端固定设有控制夹手转盘升降的升降凸台,所述夹手与夹手转盘固定连接,所述夹紧凸轮槽滑动连接夹手,所述凸轮转台下端中心位置固定设有凸轮齿轮,所述凸轮齿轮下端紧贴转动安装在夹手轴上的轴承,所述轴承下端紧贴夹手齿轮上端,所述升降凸台下端靠外部分与顶杆头部接触,通过凸台与顶杆的配合,使所述运动组件转动时,完成配合夹手夹紧动作的上下移动。
6、所述步进电机的输出轴固定连接步进电机齿轮,所述步进电机齿轮固定安装在支撑装置内部下端,所述步进电机齿轮与夹手齿轮和凸轮齿轮啮合连接,所述步进电机齿轮上端为凸台配合齿、上端为夹手配合齿。
7、作为本发明的进一步方案,所述夹手包括固定臂,所述固定臂末端固定连接夹手转盘,所述固定臂前端与活动指末端,所述活动指末端与固定臂之间固定安装弹簧,所述活动指末端固定连接钢绳的一端,所述钢绳沿弹簧中心穿过固定臂,再沿固定臂相对活动指的一侧延伸至固定臂的末端,并与所述固定臂末端的运动滑头固定连接,所述运动滑头分别与固定臂和夹紧凸轮槽滑动连接。
8、作为本发明的进一步方案,所述夹紧凸轮槽包括弧度为1/16π的松开保持程,且所述1/16π的松开保持程的开头部分正对传送带一,其后接1/32π夹紧程,接3/16π的夹紧保持程,接1/32π松开程,接1/32π夹紧程,接3/16π夹紧保持程,接1/32π松开程,接7/16π松开保持程,所述夹紧凸轮槽另外一半弧度为π的槽形与上述槽形中心对称;
9、所述升降凸台包括1/16π的高位转低位段,且位置与上述夹紧凸轮槽的1/16π的松开保持程对应,其后接1/32π低位保持段,接1/32π低位转中位段,接1/8π中位保持段,接1/32π中位转低位段,接1/16π低位保持段,接1/32π低位转中位段,接1/8π中位保持段,接1/32π中位转低位段,接1/16π低位保持段,接1/32π低位转高位段,接1/8π高位保持段,所述升降凸台另外一半弧度为π的凸台高度与上述凸台中心对称。
10、作为本发明的进一步方案,所述凸台配合齿的轮齿数是夹手配合齿的轮齿数的两倍,本方案中所述凸台配合齿的轮齿数是8,所述夹手配合齿的轮齿数是4。
11、作为本发明的进一步方案,可以根据使用需求安装多个夹手。
12、作为本发明的进一步方案,所述步进电机的要求是,在代加工件位于加工工位进行加工时停止,加工完毕旋转。
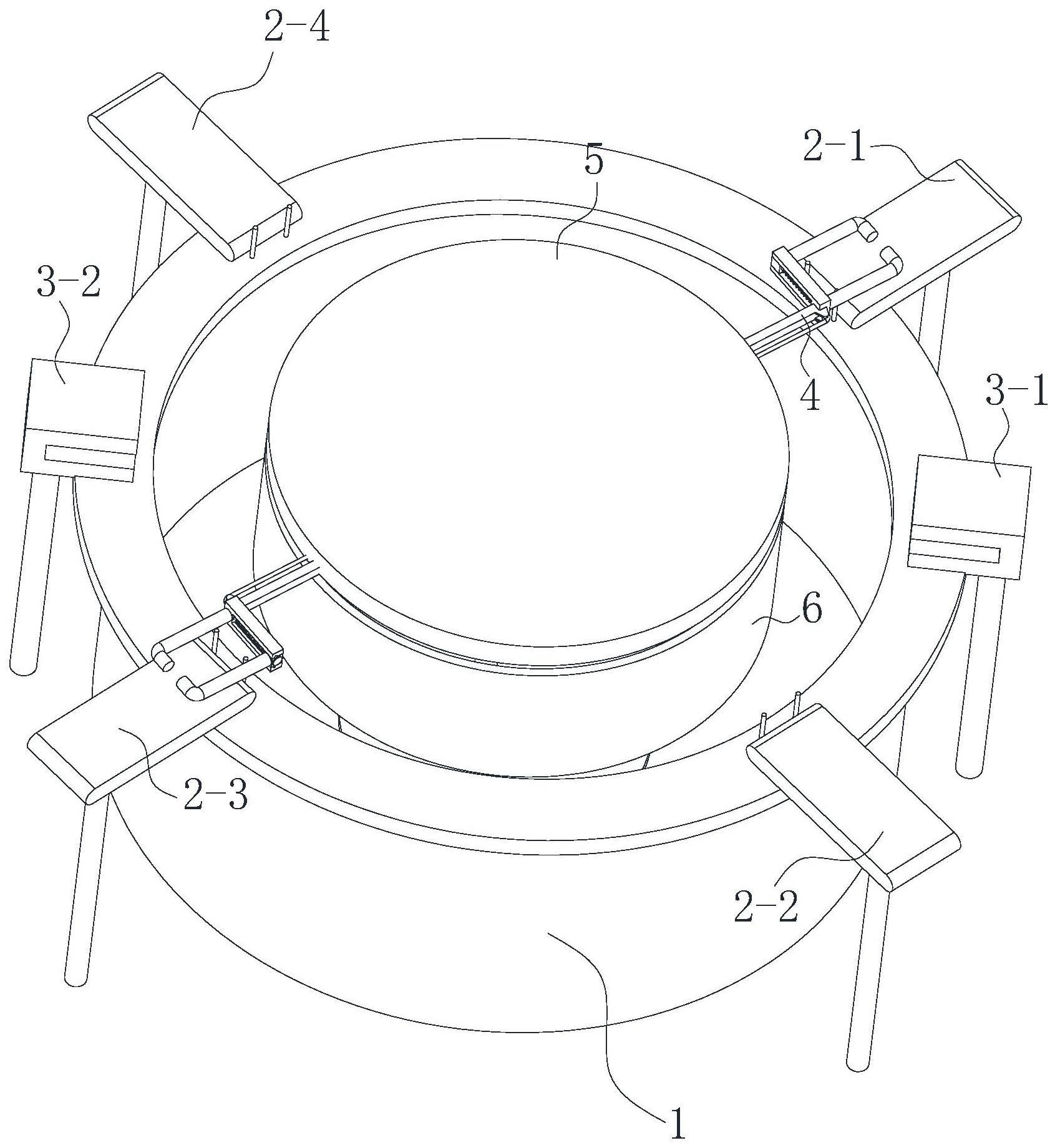
13、为解决上述现有的工业机器人安装调机要专业人员,维护检修要专业人员且需要较长的时间,设备损毁需要专业人员花费长时间去找到损毁原因并维修,其人工成本高,遇到故障时,消耗时间多的问题,本发明提供如下技术方案:以图1的工作场景为例,所述工作场景设置两组中心对称的上下料加工组件,所述上下料加工组件包括传送带一、送带二和锻压机床一,所述传送带一2-1、送带二和锻压机床一依次呈1/4π角度围绕机器人放置,所述夹手盘上对称安装两个夹手,夹手正对传送带一,且本方案尤为针对此工作场景,但不仅只针对此工作场景,对于不同的工作场景,改变所述夹紧凸轮槽和升降凸台的结构以及夹手数量即可;
14、使用时,所述步进电机运转,所述步进电机齿轮通过夹手齿轮和凸轮齿轮带动夹手转盘和凸轮转台;
15、当所述运动滑头经过夹紧程时,运动滑头远离固定臂前端,通过钢绳拉动活动指向固定臂靠拢,夹手夹紧;当所述运动滑头经过松开程时,运动滑头靠近固定臂前端,钢绳松开,所述活动指通过弹簧复位,夹手松开;当所述运动滑头经过夹紧保持程或松开保持程时,运动滑头相对固定臂前端位置不变,所述活动指相对固定臂静止,夹手保持夹紧或松开状态;
16、当所述顶杆经过低位转中位段时,夹手由高度c向高度b上升;所述顶杆经过低位转高位段时,夹手由高度c向高度a上升;所述顶杆经过高位转低位段时,夹手由高度a向高度c下降;所述顶杆经过中位转低位段时,夹手由高度b向高度c下降;所述顶杆经过低位保持段时,夹手由高度a向高度c下降;所述顶杆经过低位保持段时,夹手保持在高度c;所述顶杆经过中位保持段时,夹手保持在高度b;所述顶杆经过高位保持段时,夹手保持在高度a;
17、当所述步进电机齿轮转动[0,1/4π]时,此时所述夹手配合齿与夹手齿轮的配合位置没有轮齿,夹手齿轮静止,夹手停在传送带一的位置上;所述凸轮齿轮转动角度为[0,1/8π]时,所述凸轮齿轮的转动为[0,1/8π];当所述凸轮齿轮的转动为[0,1/16π],所述夹手的运动滑头经过松开保持程,所述顶杆经过高位转低位段,所述凸轮齿轮在[1/16π,3/32π]时,所述夹手的运动滑头经过夹紧程,所述顶杆经过低位保持段,所述凸轮齿轮在[3/32π,1/8π]时,所述夹手的运动滑头经过夹紧保持程,所述顶杆经过低位转中位段(所述夹手的运动情况:所述夹手从传送带一上端a高度,以松开状态下降至加工件位置c高度,所述夹手夹紧加工件,然后略微抬起至b高度);
18、当所述步进电机齿轮转动[1/4π,1/2π]时,此时所述夹手齿轮转动[0,1/4π],夹手由传送带一转动到机床一位置,所述凸轮齿轮转动角度为[1/8π,1/4π],所述夹手的运动滑头经过夹紧保持程,所述顶杆经过中位保持段,(所述夹手的运动情况:所述夹手夹紧加工件保持在高度b,从传送带一转动到机床一位置);
19、当所述步进电机齿轮转动[1/2π,3/4π]时,此时所述夹手配合齿与夹手齿轮的配合位置没有轮齿,夹手齿轮静止,夹手停在机床一的位置上,所述凸轮齿轮转动角度为[1/4π,3/8π];当所述凸轮齿轮的转动为[1/4π,9/32π]时,所述夹手的运动滑头经过夹紧保持程,所述顶杆经过中位转低位段;当所述凸轮齿轮的转动为[9/32π,10/32π)时,夹手的运动滑头经过松开程,所述顶杆经过低位保持段;当所述凸轮齿轮的转动为10/32π时,步进电机停止,机床一对加工件进行加工,加工完毕后,步进电机继续工作;当所述凸轮齿轮的转动为(10/32π,11/32π]时,夹手的运动滑头经过夹紧程,所述顶杆经过低位保持段;当所述凸轮齿轮的转动为[11/32π,3/8π]时,夹手的运动滑头经过夹紧保持程,所述顶杆经过低位转中位段(所述夹手的运动情况:所述夹手在机床一上方夹紧加工件,由高度b下降到高度c,然后夹手保持在高度c松开,将加工件放置在机床一上;此时,步进电机停止,机床一对加工件进行加工,加工完毕后,步进电机继续工作;夹手保持在高度c夹紧加工件,然后保持夹紧状态,由高度c上升到高度b);
20、当所述步进电机齿轮转动[3/4π,π]时,此时所述夹手齿轮转动[0,1/2π],夹手由机床一转动到传送带二位置,所述凸轮齿轮转动角度为[3/8π,1/2π],所述夹手的运动滑头经过夹紧保持程,所述顶杆经过中位保持段,(所述夹手的运动情况:所述夹手夹紧加工件保持在高度b,从机床一转动到传送带二位置);
21、当所述步进电机齿轮转动[π,5/4π]时,此时所述夹手配合齿与夹手齿轮的配合位置没有轮齿,夹手齿轮静止,夹手停在机床一的位置上,所述凸轮齿轮转动角度为[1/2π,5/8π];当所述凸轮齿轮的转动为[5/8π,21/32π]时,所述夹手的运动滑头经过夹紧保持程,所述顶杆经过中位转低位段;当所述凸轮齿轮的转动为[21/32π,22/32π]时,夹手的运动滑头经过松开程,所述顶杆经过低位保持段;当所述凸轮齿轮的转动为[22/32π,5/8π]时,夹手的运动滑头经过松开保持程,所述顶杆经过低位转高位段(所述夹手的运动情况:所述夹手夹紧加工件从传送带二上方高度b位置,下降至高度c,所述夹手保持在高度c松开夹紧件,将夹手放置在传送带二;然后夹手保持松开状态由高度c上升至高度a);
22、当所述步进电机齿轮转动[5/4π,2π]时,此时所述夹手齿轮转动[1/2π,π],夹手由传送带二转动到下一组上下料加工组件传送带三位置,所述凸轮齿轮转动角度为[5/8π,π],所述夹手的运动滑头经过松开保持程,所述顶杆经过高位保持段,(所述夹手的运动情况:所述夹手以松开状态保持在高度a,从传送带二转动到下一组上下料加工组件传送带三位置);
23、此后所述夹手重复上述动作。
24、与现有技术相比,本发明的有益效果是:
25、本发明的运动核心构件为凸轮构件,运动原理简单,不涉及一些非专业人士无法理解的结构,通过这些简单常用的结构的组合完成了机床自动化上下料的方案,对安装、操作、维修人员的要求不高,在进行安装调试、生产加工、维护维修时,不需要专门聘请专业人员,大大缩减了人力成本;且凸台的开放式设计方案,可以让生产者根据实际使用环境进行定制时,变的非常简单;夹手循环式工作方案可以让使用者根据机床的工作效率,进行加装或去除夹手,可以完全将机床的工作效率开发出来,最大化利用加工机床;旋转式机身可以做到一机多配(即一台工业机器人配合多台机床使用),节约了机器人资源和使用者成本。
- 还没有人留言评论。精彩留言会获得点赞!