一种柜门拉手加工用车削处理装置及其控制方法与流程
本发明涉及车削加工领域,尤其涉及一种柜门拉手加工用车削处理装置及其控制方法。
背景技术:
1、车削即车床加工,车床加工是机械加工的一部分。车床加工主要用车刀对旋转的工件进行车削加工。在车床上还可用钻头、扩孔钻、铰刀、丝锥、板牙和滚花工具等进行相应的加工。车床主要用于加工轴、盘、套和其他具有回转表面的工件,是机械制造和修配工厂中使用最广的一类机床加工。
2、现有技术公开了部分车削加工方面的发明专利,申请号为cn201230177473.9的中国专利,公开了一种轴承车削上料机构,包括气缸、楔形块、滚子、支撑板、固定卡槽、压环、夹紧装置、压板、活塞缸、连接支撑架、夹紧机构、床身。
3、在对柜门拉手进行车削加工时,通常会使用柱状的原料进行车削,通过不断的进料实现柜门拉手的依次车削加工,而在原料进料的过程中,为了避免原料的浪费,需要每次进料相同的长度,以避免过度进料或者进料长度不足而造成原料的浪费,并且在原料加工至端部时,需要对剩余的原料长度进行判断,以避免原料端部在进行最后一次加工时难以稳定夹持而造成的加工失误,从而造成原料浪费的情况发生。
技术实现思路
1、本发明的目的是为了解决现有技术中存在的缺点,而提出的一种柜门拉手加工用车削处理装置及其控制方法。
2、第一方面,本发明提供一种柜门拉手加工用车削处理装置,包括:
3、底座,上设有第一滑动座和移动刀架,所述第一滑动座用于支撑调节所述移动刀架的位置;
4、第一箱体,固定于所述底座顶部,内设有转动筒和卡盘,以使原料通过所述转动筒上料后穿过所述卡盘进行夹持,所述卡盘通过驱动件驱动转动;
5、推动机构,所述推动机构安装于所述转动筒的内部;
6、在原料放入所述转动筒后,推动机构间歇等距推动原料向所述卡盘移动进给,并在进给的过程中对剩余的原料长度进行判断,如果剩余原料长度不足以支持下一次加工,则推动机构复位,结束本轮加工。
7、推动机构在对原料进行最后一次推动时,若推动的距离满足一次加工需要推动的距离,再次对原料进行加工,若推动的距离不满足一次加工需要的距离,此时加工停止,从而有利于每次对原料均推动规定的加工距离,并且在最后识别到加工距离不足时,直接停止对原料的加工,从而有利于对原料进行充分利用,并且有利于避免原料最后一次加工由于长度不足而加工失败,从而影响加工效率的情况发生。
8、优选的,还包括:
9、支撑架,所述支撑架固定于所述第一箱体的侧壁上,所述支撑架的顶部固定有进料斗,原料逐个下落至所述进料斗的开口处被所述支撑架承接;
10、气缸,所述气缸固定于所述第一箱体的顶部,所述气缸的伸缩杆端部通过推动板推动原料向所述转动筒的内部上料;
11、操作者将原料放置在进料斗的内部,随后操作者启动装置,堆积在进料斗内部的原料依次下落至进料斗的底部开口处,控制器控制气缸启动,气缸启动后通过伸缩杆拉动推动板移动,推动板的端部固定有推动杆,推动板带动推动杆移动,推动杆沿着进料斗的底部开口移动,对进料斗的底部开口内部的原料进行推动,使得原料被推动至转动筒的内部,完成对原料的上料,在原料上料完毕后,气缸带动推动板和推动杆复位,随后,在原料一个原料完成整个加工过程后,推动机构获取原料用尽信息时,通过控制器控制气缸启动,从而再次进行原料的上料,以此循环。
12、优选的,所述驱动件包括第三电机,所述第三电机通过安装腔固定于所述第一箱体的内部,所述第三电机的输出轴通过第三齿轮和第四齿轮的啮合传动带动卡盘转动;
13、在需要带动卡盘转动时,控制器控制第三电机启动,第三电机启动后通过输出轴带动与之固定的第三齿轮转动,第三齿轮转动后带动与之啮合的第四齿轮转动,第四齿轮带动与之固定的卡盘转动,从而带动卡盘整体以及通过卡盘夹持的原料进行转动。
14、第二方面,提供一种柜门拉手加工用车削处理装置的控制方法,该控制方法包括以下步骤:
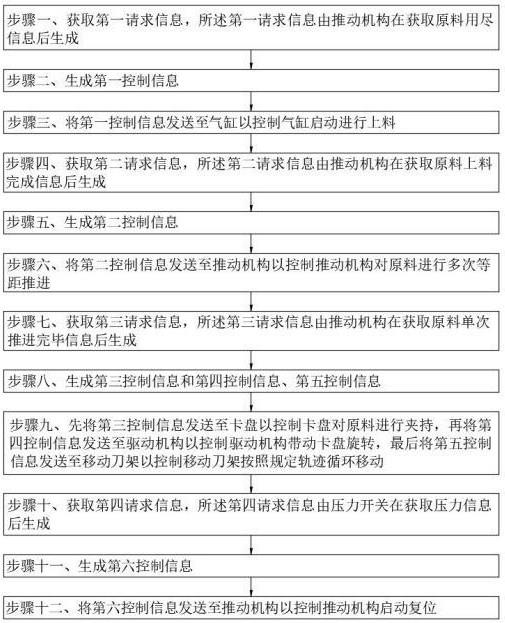
15、步骤一、获取第一请求信息,所述第一请求信息由推动机构在获取原料用尽信息后生成;
16、步骤二、生成第一控制信息;
17、步骤三、将第一控制信息发送至气缸以控制气缸启动进行上料;
18、步骤四、获取第二请求信息,所述第二请求信息由推动机构在获取原料上料完成信息后生成;
19、步骤五、生成第二控制信息;
20、步骤六、将第二控制信息发送至推动机构以控制推动机构对原料进行多次等距推进;
21、步骤七、获取第三请求信息,所述第三请求信息由推动机构在获取原料单次推进完毕信息后生成;
22、步骤八、生成第三控制信息和第四控制信息、第五控制信息;
23、步骤九、先将第三控制信息发送至卡盘以控制卡盘对原料进行夹持,再将第四控制信息发送至驱动机构以控制驱动机构带动卡盘旋转,最后将第五控制信息发送至移动刀架以控制移动刀架按照规定轨迹循环移动;
24、步骤十、获取第四请求信息,所述第四请求信息由压力开关在获取压力信息后生成;
25、步骤十一、生成第六控制信息;
26、步骤十二、将第六控制信息发送至推动机构以控制推动机构启动复位。
27、优选的,所述推动机构的具体推进方法包括以下步骤:
28、a1、获取原料用尽信息;
29、a2、生成第一请求信息;
30、a3、将第一请求信息发送至控制器以请求控制器控制气缸启动;
31、a4、获取原料上料完成信息;
32、a5、生成第二请求信息;
33、a6、将第二请求信息发送至控制器以请求控制器控制推动机构启动对原料进行多次等距推进;
34、a7、获取第二控制信息,控制推动机构启动对原料进行多次等距推进。
35、优选的,所述步骤六中控制推动机构对原料进行多次等距推进的具体方法包括:
36、s1、初步推动:对原料进行第一次推动,推动原料由卡盘伸出;
37、s2、停止推动:对原料进行设定距离的推动后,停止对原料的推动;
38、s3、再次推动:停止推动规定时间后,再次对原料进行设定距离的推动;
39、s4、再次停止推动:推动完毕后,再次在规定时间内停止对原料的推动;
40、s5、循环s3至s4的步骤。
41、与现有技术相比,本发明具有以下有益效果:
42、1、本发明通过推动机构的设置,对原料进行推动,从而有利于根据拉手加工需要的原料长度,对原料进行多次等距离的推进,从而有利于避免原料推进距离过长或者过短时,造成原料浪费或者加工失败的情况发生,从而有利于提高对原料的加工效率。
43、2、本发明通过压力开关的设置,使得在整个过程中,通过滑动架对原料的端部进行支撑,使得原料的两端均受到夹持,从而有利于避免原料在加工过程中由于端部未稳定夹持而产生晃动,有利于对原料进行稳定加工,在对原料进行推动时,对原料进行等距离的推动,在最后一次推动过程中,在规定位置停止对原料的推动,此时若完成一个完整的单次推动,能够通过控制器控制对原料进行一次机构,若未完成一次完整的单次推动,在控制器的控制下不再对原料进行加工,而是启动进料机构进行新的原料上料,有利于提高对原料加工的效率。
- 还没有人留言评论。精彩留言会获得点赞!