一种灵动岛内共享视觉的补焊方法及系统与流程
本发明涉及智能制造,具体为一种灵动岛内共享视觉的补焊方法及系统。
背景技术:
1、目前主流的汽车车身补焊工位有三种输送和定位模式:a、高速滚床+精度滑橇的模式;b、简易滚床+线旁定位夹具模式;c、机器人搬运+固定工装定位。
2、三种模式的柔性能力都受产品结构影响较大,无法实现多车型的快速切换生产、且输送和定位占用的时间较长,输送和定位设备的开发成本高。
3、部分新模式采用柔性程度更高的agv输送加视觉技术对车身进行定位,引导机器人完成补焊作业,该方案主要存在以下不足:
4、(1)每台机器人采用单独的视觉相机进行定位和引导,系统调试过程复杂、调试周期长;
5、(2)某台视觉相机出故障后,该相机对应的机器人无法获取车身位置信息,无法准确进行焊接作业;
6、(3)当视觉系统变动(人为或碰撞或设备损坏)或机器人变动(零点丢失,机器人轨迹改变,机器人作业装置碰撞损坏)时,系统恢复时间长,对生产影响大
7、(4)当作业机器人数量多时,对应的视觉相机数量也多,系统的投资成本高。
技术实现思路
1、鉴于上述存在的问题,提出了本发明。
2、因此,本发明解决的技术问题是:现有的汽车车身补焊工位输送和定位模式方法存在输送和定位时间长,开发成本高以及无法实现多车型的快速切换生产、调试周期长、某台视觉相机出故障后该相机对应的机器人无法准确进行焊接作业、系统恢复时间长的问题。
3、为解决上述技术问题,本发明提供如下技术方案:一种灵动岛内共享视觉的补焊方法,包括:
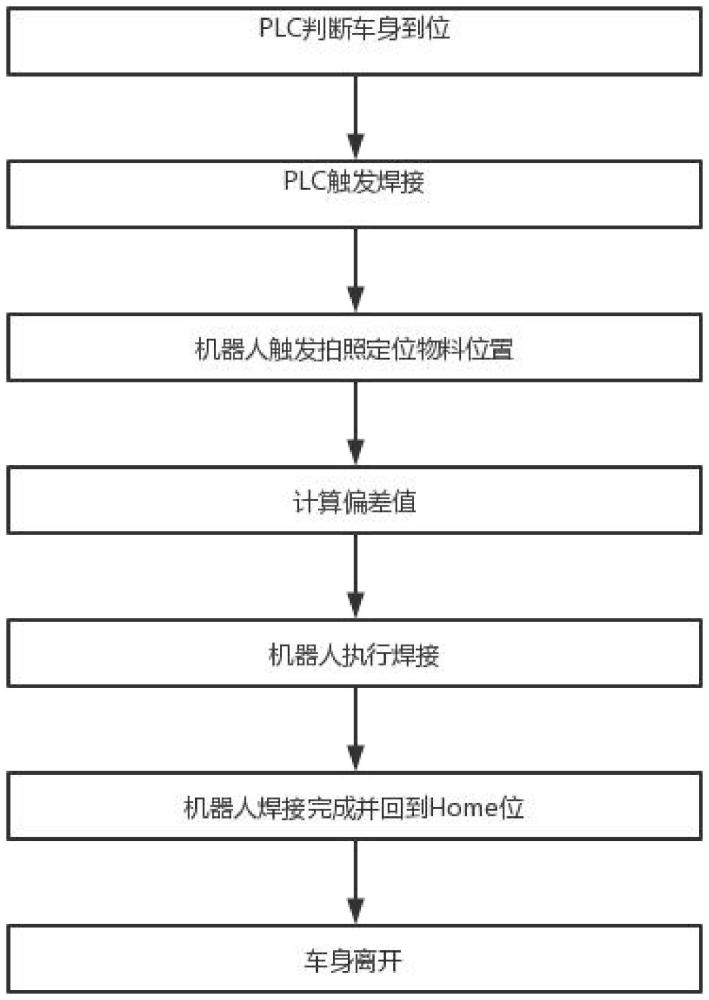
4、车身通过输送设备运输到工位内,工位内的传感器检测车身是否在工作位置,并将车身在位信号发送给plc;plc接收到车身在位信号后给工位的机器人发送允许焊接信号;机器人接收到允许焊接信号后根据预设的轨迹移动到固定的拍照位置;机器人到达拍照位后发送允许拍照信号给视觉系统,相机对车身进行拍照识别获取车身的位置和姿态信息;视觉控制器根据拍照获取的位姿信息与示教车身的位姿信息进行比较计算得出白车身的位姿偏差值δt,并将偏差值分别发送给机器人;机器人在示教轨迹的基础上补偿偏移值进行焊接作业;机器人完成焊接作业后回到home位,并将工作完成信号发送给plc;plc控制输送设备将车身输送到下一工位。
5、作为本发明所述的灵动岛内共享视觉的补焊方法的一种优选方案,其中:所述车身通过输送设备运输到工位内包括装配、焊接、涂胶、喷漆工艺环节。
6、作为本发明所述的灵动岛内共享视觉的补焊方法的一种优选方案,其中:所述传感器检测车身包括传感器进行系统标定,所述系统标定包括手眼标定和机器人全局标定;所述手眼标定包括机器人与其手臂上安装的相机进行手眼标定,估计手眼外参,完成手眼标定。
7、作为本发明所述的灵动岛内共享视觉的补焊方法的一种优选方案,其中:所述机器人全局标定包括选择岛内一台机器人,通过激光跟踪仪建立全局坐标系og;机器人携带靶球,通过移动若干位置,标定出机器人(os/ou)和全局坐标系(og)的变换关系tgu和tgs,机器人基座的坐标变换为tgr;所述tgu是右侧机器人ou到全局坐标系og的变换;所述tgs是右侧机器人os到全局坐标系og的变换。
8、作为本发明所述的灵动岛内共享视觉的补焊方法的一种优选方案,其中:所述示教车身的位姿信息包括左右相机分别拍摄零件的指定特征,获取在机器人基座下的若干三维坐标点,分别记为{p1,p2,p3...}和{q1,q2,q3...};通过tgs/tgu,分别将特征点转到全局坐标系下,分别记为{u1,u2,u3...}和{v1,v2,v3...};由零位点,建立零件的全局坐标系,位置为特征点坐标的质心w0=[wx,wy,wz],姿态与全局坐标系相同,零件零位位姿记为:[wx,wy,wz,0,0,0];将零件位姿转换到左右侧机器人的基座坐标系下,分别记为ps/pu;左右侧机器人分别使用ps/pu作为工作坐标系,对焊接点位进行示教。
9、作为本发明所述的灵动岛内共享视觉的补焊方法的一种优选方案,其中:所述进行焊接作业包括生产过程中,左右相机分别拍摄零件的指定特征,获取在机器人基座下的若干三维坐标点,分别记为{p1’,p2’,p3’...}和{q1’,q2’,q3’...};通过tgs/tgu,分别将特征点转到全局坐标系下,分别记为{u1’,u2’,u3’...}和{v1’,v2’,v3’...};通过{u1,u2,u3...}和{v1,v2,v3...}与{u1’,u2’,u3’...}和{v1’,v2’,v3’...},估算出车身的姿态变化量δt;车身在机器人坐标系下的位姿分别为,车身左侧机器人的位姿ts=tsgδt,车身右侧机器人的位姿:tu=tugδt;将位姿转换为位置和欧拉角,分别发送给相应的机器人,焊接机器人根据新的用户坐标,对焊点位姿进行偏移补偿,以完成焊接。
10、作为本发明所述的灵动岛内共享视觉的补焊方法的一种优选方案,其中:所述焊接作业包括通过机器人零点快速找回技术,在仿真环境下在静态视觉的视界中选择基准点,并用仿真环境中完成这多个基准点程序,在实际场景中运行仿真环境下的程序,用视觉测量出实际场景中的多个基准点实际位姿与仿真环境下的基准点机器人末端位姿做对比,得出机器人程序的偏置量,将偏置量返回给现场中基准点,得出找回原现场机器人丢失的轨迹。
11、本发明的另外一个目的是提供一种灵动岛内共享视觉的补焊系统,其能通过共享的视觉系统进行车身定位和姿态检测,解决了每个机器人需要独立的视觉相机,系统调试复杂度高和高投资成本问题。
12、为解决上述技术问题,本发明提供如下技术方案:一种灵动岛内共享视觉的补焊系统,包括:视觉处理模块、机器人控制模块、坐标转换模块以及通信监控模块;所述视觉处理模块用于对车身的高精度拍照识别,获取车身的具体位置和姿态信息,对环境因素如光照变化进行自适应调整;所述机器人控制模块根据从视觉处理模块接收到的车身位置和姿态信息,计算焊接轨迹,并对机器人进行实时控制,完成焊接任务;所述坐标转换模块将从视觉处理模块得到的数据转化为机器人可执行的指令,通过精确的手眼标定和机器人全局标定,确保焊接任务的准确,自动检测和修正偏差;所述通信监控模块用于监控整个系统的工作状态,并在出现任何异常时及时报警。
13、一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如上所述灵动岛内共享视觉的补焊方法的步骤。
14、一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如上所述灵动岛内共享视觉的补焊方法的步骤。
15、本发明的有益效果:本发明提供的灵动岛内共享视觉的补焊方法适用于无精确定位工况下的作业,特别是矩阵岛式生产模式下的作业;当机器人或视觉系统中有损坏时,可以快速恢复生产,减少停产后标定恢复工作;柔性引导补器人准确的完成焊接作业。减少标定作业的工作量,快速完成补焊岛所有机器人及视觉设备的标定工作。
- 还没有人留言评论。精彩留言会获得点赞!