一种激光切割方法与流程
本发明涉及激光切割,具体涉及一种激光切割方法。
背景技术:
1、激光切割技术是一种通过使用高能激光对材料进行局部加热和熔化,进而将材料切割成所需形状,但随着激光切割技术的不断发展,其也被广泛应用于切割材料较为精巧或易碎的材料。
2、现有激光切割技术主要分为:
3、激光汽化切割:通过在激光的切割过程中,通过辅助气体将切割喷出物从切缝底部吹走,但该方法需要保证材料的厚度一定不要超过激光光束的直径。
4、氧化熔化切割法:以氧气或其他活性气体,使得材料在激光束的照射下被点燃,与氧气发生激烈的化学反应产生另一热源,使材料进一步加热,进而实现对材料的切割,但其容易造成材料出现严重割缝、明显的粗糙度以及增加的热影响区,难以保证切割结果的质量。
5、因此怎样在保证激光切割过程不出现严重割缝合材料粗糙感的同时,提高激光切割的精密度是现有技术的难点,为此,本发明提供一种激光切割方法。
技术实现思路
1、为了解决上述技术问题,本发明的目的在于提供一种激光切割方法。
2、为了实现上述目的,本发明提供如下技术方案:
3、一种激光切割方法,所述激光切割方法包括如下步骤:
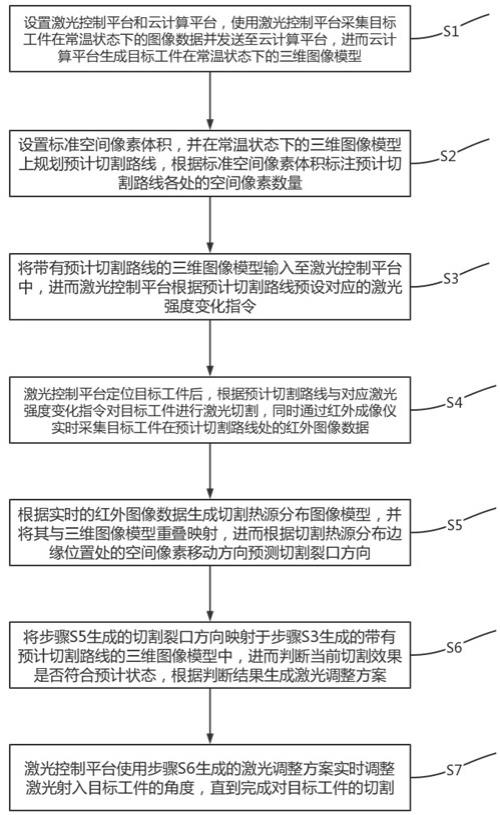
4、s1、设置激光控制平台和云计算平台,使用激光控制平台采集目标工件在常温状态下的图像数据并发送至云计算平台,进而云计算平台生成目标工件在常温状态下的三维图像模型;
5、s2、设置标准空间像素体积,并在常温状态下的三维图像模型上规划预计切割路线,根据标准空间像素体积标注预计切割路线各处的空间像素数量;
6、s3、将带有预计切割路线的三维图像模型输入至激光控制平台中,进而激光控制平台根据预计切割路线预设对应的激光强度变化指令;
7、s4、激光控制平台定位目标工件,进而根据预计切割路线与对应激光强度变化指令对目标工件进行激光切割,同时通过红外成像仪实时采集目标工件在预计切割路线处的红外图像数据;
8、s5、根据实时的红外图像数据生成切割热源分布图像模型,并将其与三维图像模型进行重叠映射,进而根据切割热源分布边缘位置处的空间像素移动方向预测切割裂口方向;
9、s6、将步骤s5生成的切割裂口方向映射于步骤s3生成的带有预计切割路线的三维图像模型中,进而判断当前切割效果是否符合预计状态,根据判断结果生成激光调整方案;
10、s7、激光控制平台使用步骤s6生成的激光调整方案实时调整激光射入目标工件的角度,直到完成对目标工件的切割。
11、进一步的,所述激光控制平台有工业激光器、聚焦器、切割头、放置台以及激光扫描器;
12、所述云计算平台用于根据图像数据生成目标工件的三维图像模型,并在三维图像模型上设置预计切割路线以及标注切割热源分布,进而生成激光调整方案。
13、进一步的,目标工件在常温状态下的三维图像模型的生成过程包括:
14、激光控制平台通过切割头移动激光扫描器,进而激光扫描器向目标工件发送散列扫描激光,同时根据收集到的散列扫描反射激光输出图像数据,并将图像数据发送至云计算平台;
15、云计算平台根据图像数据生成若干个部分三维图像模型,将全部部分三维图像模型相互重叠映射,进而对缺失部位进行补全,得到对应目标工件的三维图像模型。
16、进一步的,所述预计切割路线的规划过程包括:
17、设置标准空间像素体积,根据标准空间像素体积在三维图像模型划分出若干个空间像素,根据预设的切割方案,云计算平台在三维图像模型表面标注k条预计切割路线,同时根据各条预计切割路线所在空间平面相对于放置台平面的位置以及预计切割路线的宽度与长度,在三维图像模型上分割出一个垂直于放置台的切割平面,k为大于0的自然数;
18、根据空间像素的边长以及对应的切割平面,将各个预计切割路线划分成若干个预计切割子区域,并统计各个预计切割子区域的空间像素数量。
19、进一步的,根据所述预计切割路线预设激光强度变化指令的过程包括:
20、根据三维图像模型上各个预计切割路线到放置台之间的空间像素数量,对各个预计切割子区域设置不同的激光强度变化指令,其中激光强度变化指令包括切割功率、激光光斑面积以及切割方向。
21、进一步的,所述激光强度变化指令的执行过程包括:
22、激光控制平台通过激光扫描器定位目标工件的所在位置,进而根据各个激光强度变化指令对应的预计切割子区域,根据确认结果,激光控制平台通过切割头对工业激光器进行位置移动或射入角度调整,进而工业激光器垂直向对应位置发送激光;
23、在工业激光器对目标工件进行激光切割的过程中,设置于放置台上红外成像仪从不同的水平角度采集目标工件的红外图像数据。
24、根据红外图像数据中目标工件的热源分布生成多个切割热源分布图像,对切割热源分布图像各个边缘处设置20到30个匹配特征区域,进而将切割热源分布图像的边缘处相互匹配,若任意两份切割热源分布图像边缘处的匹配特征区域相同,则对应匹配特征区域进行重叠融合,当切割热源分布图像边缘处匹配完成后,采用相同方法,在内部设置匹配特征区域,进而四份切割热源分布图像内部相同的匹配特征区域进行重叠融合,进而得到切割热源分布图像模型;
25、云计算平台将切割热源分布图像模型与三维图像进行重叠映射,进而根据切割热源分布图像模型中的区域热斑的分布,对三维图像模型中相应的空间像素进行颜色渲染,以及对相应空间像素的进行位置更新或剔除。
26、进一步的,对切割裂口方向进行预测的过程包括:
27、根据来自红外成像仪不断生成的红外图像数据,云计算平台根据红外图像数据实时更新三维图像模型,同时标记各个预计切割路线边缘位置的空间像素的移动方向,以及当前时刻其与预计切割路线边缘位置的距离;
28、建立三维直角坐标系,将与切割热源分布图像模型重叠映射后的三维图像映射于三维直角坐标系中,以在常温状态时,各个预计切割路线边缘位置的空间像素的位置为起点位置,进而每当三维图像模型更新后,获得各个边缘位置的空间像素的向量;
29、将三维图像模型中热斑颜色最深的预计切割子区域设置为当前激光光斑位置,进而以当前激光光斑位置所在位置为中心,分别获得左右位置前后10个边缘位置的空间像素的向量矢量和,根据矢量和向量的指向方向作为预计切割裂口方向。
30、进一步的,根据切割裂口方向的预测结果生成激光调整方案的过程包括:
31、设置偏离阈值,并根据预计切割裂口方向的矢量和模值判断预计切割裂口大小;
32、将矢量和模值与偏离阈值进行对比,若矢量和模值小于偏离阈值,则判断对应预计切割路线的激光切割过程正常;
33、若矢量和模值大于或等于偏离阈值,则判断对应预计切割路线的激光切割过程预计向矢量和向量的指向方向出现切割裂口,进而根据左侧矢量和模值获得激光射入调整角度θ;
34、若当前激光光斑位置的左右边缘位置同时存在裂口时,则根据左右两侧的矢量和模值将激光光斑的半径缩小,根据激光射入调整角度θ或激光光斑缩小的半径值生成激光调整方案。
35、进一步的,激光控制平台根据接收到的激光调整方案实时通过切割头中的聚焦器调整激光射入目标工件时的角度或激光光斑半径值,直到完成全部预计切割路线为止。
36、与现有技术相比,本发明的有益效果是:
37、1、本发明通过采集目标工件在常温状态下的图像数据生成对应的三维图像模型,通过在三维图像模型内部划分出若干个空间像素以及在外部标注预计切割路线,进而设置激光强度变化曲线并进行激光切割,采集目标工件在切割过程中的红外图像数据,进而根据红外图像数据在三维图像模型中标注切割热源分布,解决了在激光切割过程中由于温度过高而无法准确实时查看目标工件的当前切割状态,进而提高激光切割过程的精密度;
38、2、本发明通过三维图像模型中的切割热源分布判断目标工件在当前切割状态下的切割裂口方向,并生成对应的激光调整方案,根据激光调整方案实现对激光的实时调整,进而有效的解决了激光切割过程中出现的严重割缝等问题。
- 还没有人留言评论。精彩留言会获得点赞!