一种基于定位结构的电子零部件焊接装置的制作方法
本发明属于焊接,具体为一种基于定位结构的电子零部件焊接装置。
背景技术:
1、电子零部件生产加工的过程中,经常需要对其进行焊接处理,而现有的操作技术在进行焊接过程中经常需要工作人员通过夹具对两个电子零部件进行固定,再通过工作人员手持焊接枪对两个电子零部件的连接处进行焊接固定,人力焊接虽然具有一定的精确性,但是长时间的工作导致人力疲惫,无法始终保持精确度,可以通过电动焊接机构对两个电子零部件的连接处进行焊接,保证了精准度,但是需要工人员调节两个电子零部件的位置,以使两个电子零部件的连接处对准电动焊接机构,需要反复调整两个电子零部件的位置,不便于实际操作,存在一定的局限性。
技术实现思路
1、针对上述情况,为克服现有技术的缺陷,本发明提供一种基于定位结构的电子零部件焊接装置,有效的解决了上述背景技术中需要反复调整两个电子零部件位置的问题。
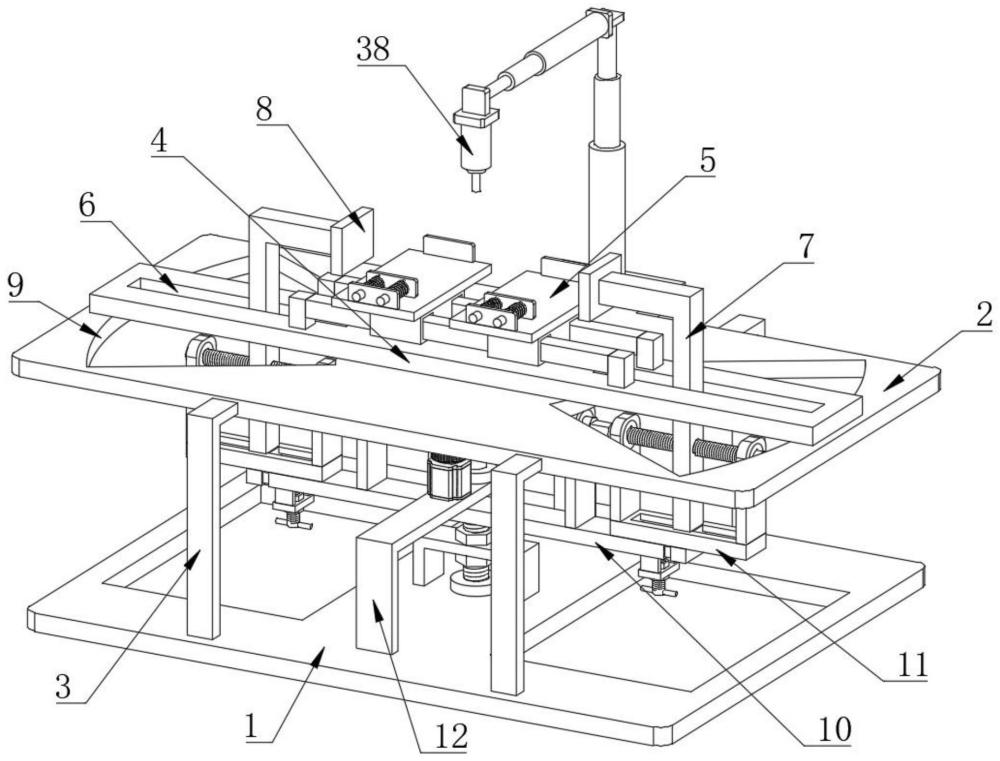
2、为实现上述目的,本发明提供如下技术方案:一种基于定位结构的电子零部件焊接装置,包括底座,所述底座的上方设有支撑台,支撑台和底座通过第一连接板连接,支撑台的顶部转动连接有第一旋转座,第一旋转座的上方设有两个活动座,活动座和第一旋转座通过滑动导向单元连接,活动座上设有夹持定位结构,支撑台上设有零部件焊接机构,第一旋转座上开设有两个第一矩形孔,支撑台的上方设有两个定位板,定位板上固定连接有活动架,支撑台上开设有两个通孔,且活动架贯穿第一矩形孔和通孔,支撑台和底座之间设有第二旋转座,第二旋转座和底座通过旋定锁死结构连接,第二旋转座的上方设有两个活动板,活动板和第二旋转座通过水平间距调整单元连接,活动架上贯穿有第一丝杆,第一丝杆和活动架的连接方式为螺纹连接,第一丝杆的外部套设有第一支撑部,第一丝杆和第一支撑部的连接处设有轴承,第一支撑部和活动板固定连接,活动板上开设有导向槽,活动架的底端固定连接有导向块,且导向块位于导向槽内,底座上设有用于驱动两个第一丝杆旋转的旋转滑动结构。
3、优选的,所述旋转滑动结构包括固定安装于底座上的第一支架,第一支架的上方设有第一连接轴,第一连接轴的底端和第一支架通过轴承连接,第一丝杆的一侧设有第二连接轴,第二连接轴的外部套设有第二支撑部,第二连接轴和第二支撑部的连接处设有轴承,第二支撑部的底部和第二旋转座固定连接,第二连接轴上开设有凹槽,第一丝杆上固定连接有棱柱,且棱柱的一端位于凹槽内,第二连接轴远离第一丝杆的一端固定连接有第一伞齿轮,第一连接轴的顶端固定连接有第二伞齿轮,且第一伞齿轮和第二伞齿轮相啮合,第一支架上设有与第一连接轴相配合的旋转单元。
4、优选的,所述旋转单元包括固定安装于第一支架上的电机,电机的输出端固定连接有第一链轮,第一连接轴的外部固定套设有第二链轮,第一链轮和第二链轮通过链条连接。
5、优选的,所述水平间距调整单元包括固定安装于活动板底部的第三支撑部,第三支撑部上固定连接有插板,第二旋转座的两端分别开设有插槽,插板远离第三支撑部的一端位于对应的插槽内,第二旋转座上设有与插板相配合的防滑件。
6、优选的,所述防滑件包括两个设置于第二旋转座下方的第二丝杆,插槽的底部内壁开设有贯穿孔,第二丝杆的顶端位于贯穿孔内,且第二丝杆的顶部和插板的底部相接触,第二丝杆的外部套设有螺纹连接的支撑板,支撑板的顶部和第二旋转座的底部通过第二连接板连接,第二丝杆的外部套设有两个第一螺母,两个第一螺母分别与支撑板的两侧相接触。
7、优选的,所述旋定锁死结构包括固定安装于第二旋转座底部的第三丝杆,第三丝杆的底端和底座通过轴承连接,底座上固定连接有第二支架,第三丝杆贯穿第二支架,第三丝杆的外部套设有两个第二螺母,两个第二螺母分别与第二支架的两侧相接触。
8、优选的,所述零部件焊接机构包括设置于支撑台上方的焊接枪,焊接枪上固定连接有第一固定座,支撑台的上方设有第二固定座,第二固定座和第一固定座通过第一液压伸缩杆连接,第二固定座和支撑台通过第二液压伸缩杆连接。
9、优选的,所述滑动导向单元包括固定安装于活动座底部的固定块,固定块上开设有第二矩形孔,第一旋转座的上方设有导向板,导向板贯穿第二矩形孔,导向板的两侧分别与第二矩形孔的两侧内壁相接触,且导向板的两端分别通过第三连接板与第一旋转座连接。
10、优选的,所述第二矩形孔的顶部内壁开设有若干容纳槽,容纳槽内设有滚动球,滚动球和导向板的顶部相接触,第一旋转座的底部固定连接有转轴,且转轴贯穿支撑台,转轴和支撑台的连接处设有轴承,通过转轴和轴承的设计,以使第一旋转座和支撑台转动连接。
11、优选的,所述夹持定位结构包括固定安装于活动座顶部的限位板和固定板,固定板靠近限位板的一侧设有夹板,夹板上固定连接有两个固定柱,固定柱贯穿固定板,固定柱的外部套设有压缩弹簧,压缩弹簧的两端分别与夹板和固定板连接。
12、与现有技术相比,本发明的有益效果是:
13、(1)、把需要焊接的两个电子零部件分别放置于两个活动座上,通过夹持定位结构对电子零部件进行定位固定,根据两个电子零部件连接处的倾斜角度,通过旋定锁死结构驱动第二旋转座相对底座旋转,以使第二旋转座通过活动板驱动活动架和定位板旋转,活动架旋转时,活动架驱动第一旋转座同步旋转,进而调节两个活动座的位置,以使两个电子零部件的连接处与零部件焊接机构对齐,当第二旋转座的位置调节完毕后,通过旋定锁死结构对第二旋转座的位置进行限定,以使第二旋转座相对底座固定,通过旋转滑动结构驱动两个第一丝杆同步异向转动,第一丝杆驱动活动架和定位板移动,以使两个定位板相靠近移动,定位板推动位于活动座上的电子零部件移动,最终两个定位板分别推动两个活动座抵接在一起,通过零部件焊接机构对两个电子零部件的连接处进行焊接,只需要把电子零部件固定在活动座上,即可使得两个电子零部件自动抵接在一起,并且对两个电子零部件进行焊接,操作步骤简单便捷,不需要反复调节电子零部件的位置,便于实际使用;
14、(2)、通过电机驱动第一链轮旋转,第一链轮通过链条驱动第二链轮旋转,第二链轮驱动第一连接轴和第二伞齿轮旋转,第二伞齿轮驱动两个第一伞齿轮异向转动,第一伞齿轮通过第二连接轴驱动棱柱和第一丝杆旋转,通过电机可以驱动两个第一丝杆异向旋转,以使两个活动架异向移动,导向块在导向槽内滑动,通过导向块和导向槽的配合,以使活动架相对活动板平稳的移动;
15、(3)、工作人员驱动第二丝杆旋转,以使第二丝杆相对支撑板下移,第二丝杆的顶部不再与插板的底部紧贴,工作人员驱动活动板水平方向移动,活动板驱动第三支撑部和插板移动,改变插板位于插槽内的长度,可以根据电子零部件的不同,调节活动板、活动架和定位板的初始位置,便于两个定位板夹持不同规格的电子零部件,活动架和定位板的位置调节完毕后,工作人员驱动两个第二丝杆旋转,以使第二丝杆的顶端和插板的底部紧贴,插板相对第二旋转座固定,工作人员驱动两个第一螺母旋转,两个第一螺母夹持住支撑板,以使第二丝杆相对支撑板固定,减少第二丝杆因非人为因素相对支撑板转动的可能;
16、(4)、工作人员驱动第二旋转座旋转,第二旋转座驱动第三丝杆相对底座转动,第二旋转座旋转时,第一伞齿轮在第二伞齿轮上滚动,第二旋转座旋转不会干涉旋转滑动结构驱动两个第一丝杆旋转,不需要调整第二旋转座的位置时,工作人员驱动两个第二螺母旋转,两个第二螺母夹持住第二支架,以使第三丝杆相对第二支架和底座固定,减少第三丝杆因非人为因素相对底座转动的可能,通过第二液压伸缩杆驱动第二固定座下降,以使焊接枪下降至预设焊接位置,通过第一液压伸缩杆驱动第一固定座和焊接枪水平方向移动,以使焊接枪对两个电子零部件的连接处进行焊接;
17、(5)、工作人员驱动夹板远离限位板移动,固定柱相对固定板移动,压缩弹簧处于压缩状态,工作人员把电子零部件放置于夹板和限位板之间,工作人员松开夹板,压缩弹簧驱动夹板移动,以使夹板和限位板夹持住电子零部件,即可完成对电子零部件的固定,当定位板推动电子零部件移动时,电子零部件和活动座相对第一旋转座移动,固定块在导向板上滑动,通过固定块、导向板和第三连接板的配合,以使活动座相对第一旋转座平稳的移动,通过滚动球的设计,减少固定块相对导向板滑动时受到的阻力,增加了固定块和活动座相对第一旋转座滑动时的流畅性。
- 还没有人留言评论。精彩留言会获得点赞!