基于力传感的局部干法水下激光焊接控制方法及装置
本发明涉及水下激光焊接,尤其是涉及一种基于力传感的局部干法水下激光焊接控制方法及装置。
背景技术:
1、核电站换料水池的钢覆面长时间在辐照、腐蚀复杂环境下服役,其钢覆面组成的不锈钢板材和焊缝不可避免出现应力腐蚀开裂、腐蚀疲劳、均匀腐蚀等缺陷,有造成换料水池内液体介质泄漏的风险。采用远程在线的水下焊接技术对缺陷处进行修复是目前快速有效的维修方法。局部干法水下激光填丝焊接技术具有焊接热影响区小、控制精度高、非接触作业和适应狭窄空间能力强等优点,是完成换料水池缺陷水下维修的较好方法。
2、局部干法水下激光填丝焊接技术是通过排水装置形成局部干腔,在干腔内进行激光填丝焊接作业;焊接过程中排水装置与工件之间完成动态密封,实现排水罩内在焊接区域形成局部干腔。水下结构件不全为平板结构,应对不平整有凸起等结构进行实时的调整。局部干法水下激光填丝焊接过程中,其焊炬与工件实时接触进行焊接,焊炬达到稳定动态密封实现焊接位置的实时排水,从而完成高质量的焊接。焊炬与工件接触过程中,焊炬受到重力、反作用力、浮力、摩擦力、力矩等力作用,力会反馈给水下机械臂。焊炬在动态密封排水和焊接过程中需要受力平衡,对水下机械臂与焊炬之间的力信号进行监测和控制,是实现高质量、高精度局部干法水下激光填丝焊接的关键。
3、经查询检索,目前未发现基于力传感的局部干法水下激光填丝焊接装置及控制方法相关专利。
4、目前,力传感在激光焊接领域的应用多集中在空气环境,完成提高激光焊接的效率和精度。
5、南京航空航天大学所设计的一种基于视觉与力觉多传感耦合的激光焊接焊缝间隙与阶差控制装置与方法(cn116329739a),采用视觉与力觉多传感耦合的方法,对薄壁结构件的间隙、阶差进行自适应焊接,拓宽激光焊接工艺窗口,实现对较大间隙、阶差的精准焊接,不涉及水下激光填丝焊接领域。
6、佛山市广凡机器人有限公司所设计的一种多方位转向型自动化焊接机器人(cn112894223a),以激光焊接跟踪系统辅助力觉传感系统,两者相互弥补,为机器人遥控焊接过程的稳定性、鲁棒性提供了更好的保障,在配以视觉系统通过变焦实现机器人工作现场的全景观察,为操作者提供全局的整体信息,从而提高焊接效率和精度,不涉及水下激光填丝焊接领域。
7、力传感在打磨领域应用较多,打磨过程中打磨头和工件也存在相互作用力,为实现全自动自适应打磨,采集并控制打磨头受到的力作用较为重要。
8、华南理工大学所设计的一种基于模糊自适应力控制的恒力自动打磨方法(cn104858782b),通过实时检测磨头与工件的接触力进行力信号的反馈,通过设定的控制算法改变控制器输出的模拟量电压值,从而控制x轴伺服电动机输出转矩的大小,达到接触力控制的目的,能实现基于智能力控制技术完成打磨过程中法向磨削力的检测,并对将检测结果进行反馈,通过控制器的处理,产生驱动信号不断调整驱动器的输出力矩,从而实时控制磨削法向力,实现恒定压力的打磨,不涉及焊接领域。
9、东南大学所设计的一种基于六维力传感器和双目视觉的机器人打磨装置及打磨方法(cn108908120b),六维力传感器通过传感器固定座与机械臂的末端关节固定连接;六维力传感器通过柔性连接件与电机固定座柔性连接,打磨电机安装在电机固定座上,能够实现补偿打磨过程中的位置偏移,提高加工质量,不涉及焊接领域。
10、上海赛威德机器人有限公司所设计的一种力控打磨装置及其控制方法、打磨机器人及其控制方法(cn115741392a),设有拉压力传感器,其用于监测打磨头对工件的压力,拉压力传感器位于第一安装座与花键主轴之间。实现主动柔性打磨,其成本低,打磨精度高,柔性适应性好,操作简单,打磨噪音小,不涉及焊接领域。
11、南京熊猫电子股份有限公司所设计的一种工业机器人智能打磨系统(cn109551496b),通过力矩控制模块配合打磨模块打磨加工工件;激光扫描检测模扫描工件余量;数据处理模块和工业机器人执行模块数据交互处理完成一整套自动化打磨流程。采用新型多样化的检测系统,打磨均匀,实现曲线和曲面的全自动打磨,不涉及焊接领域。
12、在局部干法水下激光焊接领域,北京石油化工学院所设计的集成多种传感器水下激光增材排水装置(cn112355475b),对增材过程中排水装置内的温度、湿度和气压进行监测,并未涉及力传感。武汉数字化设计与制造创新中心有限公司所设计的基于多传感信号的水下局部干法激光焊接监测实验平台(cn114018918a),采用同轴相机和高速摄像对焊接过程进行监测,并未涉及力传感。
13、本发明旨在提供一种基于力传感的局部干法水下激光焊接控制方法及装置,以实现局部干法水下激光填丝焊接过程中水下机械臂对焊炬的力补偿,完成排水装置排水的动态密封、位置感知以及减少水下焊缝的缺陷,提高焊接的质量。
技术实现思路
1、本发明的目的在于提供一种基于力传感的局部干法水下激光焊接控制方法及装置,采用力传感器采集水下激光焊炬受到的作用力,控制系统根据力信号调节水下机械臂位姿,以提高焊接质量。本发明提供的诸多技术方案中的优选技术方案所能产生的诸多技术效果详见下文阐述。
2、为实现上述目的,本发明提供了以下技术方案:
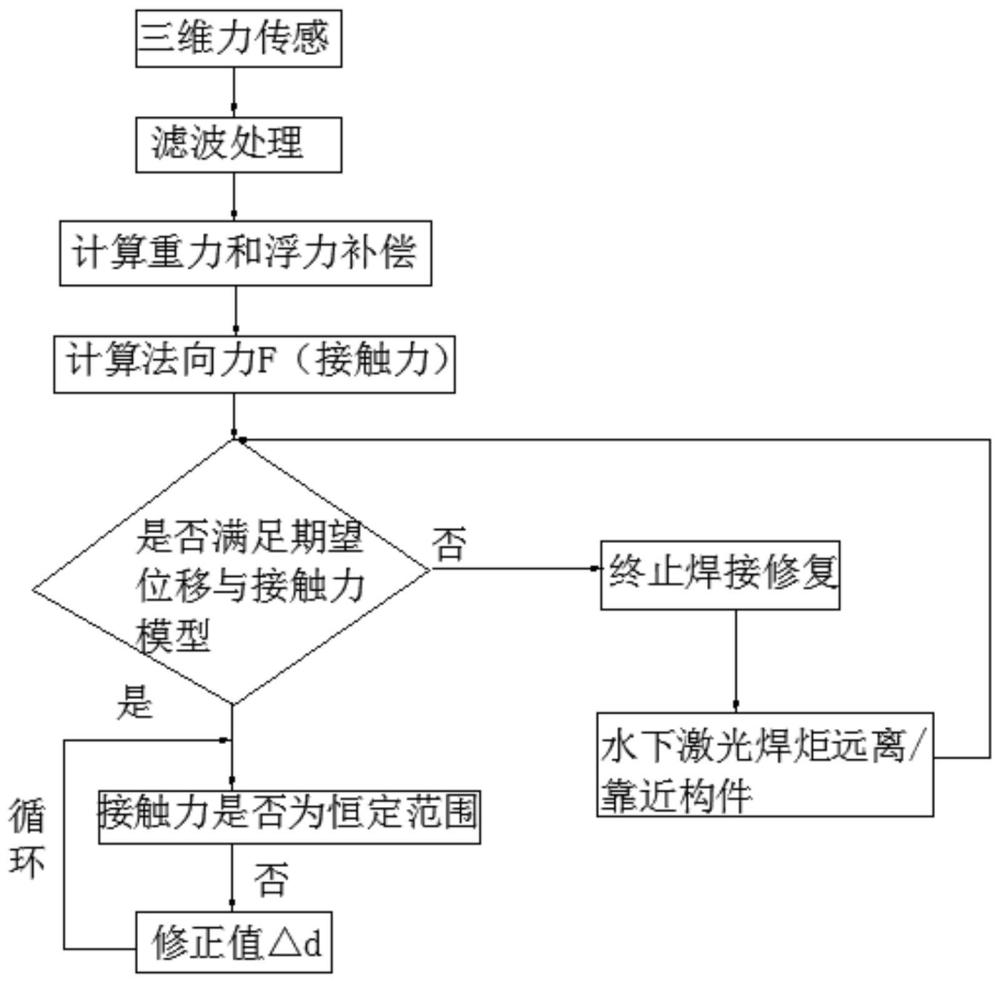
3、本发明提供的一种基于力传感的局部干法水下激光焊接控制方法,包括以下内容:判断水下焊炬是否位于焊道焊接初始位;若是,判断检测到的水下焊炬的力信号是否满足水下焊炬预期位置下的力信号值;若否,则控制机械臂调整水下焊炬位置;若是,则控制水下焊炬进行焊接操作。
4、进一步地,还包括:判断所述水下焊炬是否进行焊接操作;若是,则实时调整水下焊炬的位置以使检测到的水下焊炬的力信号在恒定范围值内。
5、进一步地,所述则控制机械臂调整水下焊炬位置,具体包括如下:若检测到的水下焊炬的力信号大于水下焊炬预期位置下的力信号值;则控制机械臂使水下焊炬远离焊板移动;若检测到的水下焊炬的力信号小于水下焊炬预期位置下的力信号值;则控制机械臂使水下焊炬靠近焊板移动。
6、本发明提供一种装置,包括:检测模块,用于检测水下焊炬与焊板接触时的力信号;初始位置判断模块,用于判断水下焊炬是否位于焊道焊接初始位;第一判断模块,用于判断检测到的水下焊炬的力信号是否满足水下焊炬预期位置下的力信号值;第一控制模块,用于控制机械臂调整水下焊炬位置以及控制水下焊炬进行焊接操作。
7、进一步地,包括:第二判断模块,用于判断水下焊炬是否进行焊接操作;第二控制模块,用于实时调整水下焊炬的位置以使检测到的水下焊炬的力信号在恒定范围值内。
8、本发明提供一种用于实施所述基于力传感的局部干法水下激光焊接控制方法的装置,包括水下激光焊炬、水下机械臂以及控制系统,所述水下激光焊炬包括排水装置,所述排水装置的下端设置有弹性部件,其特征在于,还包括力传感装置,所述力传感装置与所述控制系统相连接,所述力传感装置设置在所述水下激光焊炬与所述水下机械臂之间。
9、进一步地,所述力传感装置为六轴力传感器。
10、进一步地,所述水下激光焊炬上设置有第一连接板,所述水下机械臂上设置有第二连接板,所述力传感装置设置在所述第一连接板和所述第二连接板之间且均与所述第一连接板和所述第二连接板连接。
11、本发明优选技术方案可以产生如下技术效果:本发明通过力传感器监测焊炬受到的力信息,预判排水装置与工件之间的距离,调整焊炬的位置。
12、控制系统通过对水下机械臂与待维修构件时的作用力分析,建立期望位移与接触力的模型;力传感器采集到的力信号通过数据采集线缆,经变送器与控制系统连接;结合采集的力信号数据集,控制系统对数据进行分析,判断检测到的水下焊炬的力信号是否满足水下焊炬预期位置下的力信号值,对采集到异常数据进行处理,反馈给水下水下机械臂,水下机械臂对水下激光焊炬进行调整。
13、当水下焊炬进行焊接操作时,实时调整水下焊炬的位置以使检测到的水下焊炬的力信号保持相对稳定(在恒定范围值内),采集并控制相互作用力的稳定,实现排水装置动态密封形成局部干腔,完成高质量的水下激光填丝焊接。
- 还没有人留言评论。精彩留言会获得点赞!