远程操控深海金属结构水下自动焊接装置的制作方法
本发明属于焊接设备,具体是远程操控深海金属结构水下自动焊接装置。
背景技术:
1、水下焊接在海洋工程、核电核岛以及内陆水资源开发等水下钢结构的连接和在役钢结构件的维护中发挥着关键性的作用,目前水下焊接方法主要包括水下干法焊接、水下湿法焊接以及局部干法水下焊接。
2、其中,水下干法焊接采用大型气室罩住焊件、焊工在气室内施焊的方法,水下干法焊接安全性最好,但使用局限性很大,应用不普遍。水下湿法焊接是焊工在水下直接施焊,在施焊过程中为克服水的冷却和压力作用造成的引弧及稳弧困难,其引弧电压要高于大气中的引弧电压,而由于水具有导电性,操作人员还是存在焊接的过程中触电的可能性。而局部干法焊接是一种比较新型的焊接方式,利用与焊枪相配合的排水设备,在进行水下焊接时将待焊部位的一小块区域与周围水环境隔离开。该方法的焊缝成形质量不仅与水下干法相类似,同时具有水下湿法焊接技术所具有的设备简单、作业周期短、成本低以及通用性和环境适应性好等特征,因此局部干法水下技术应用前景广泛。
3、局部干法焊接技术通过待焊区域的局部排水,以降低或消除周围水环境对焊接过程的影响;但是由于待焊区域的钢铁表面往往呈弧形,现有的局部干法焊接技术不能很好的形成隔离环境以满足焊接需要。
技术实现思路
1、本发明的目的是提供一种远程操控深海金属结构水下自动焊接装置,能根据待焊区域进行自适应贴合形成稳定的焊接空间,提高了焊接质量和效率。
2、为了实现上述目的,本发明的技术方案如下:
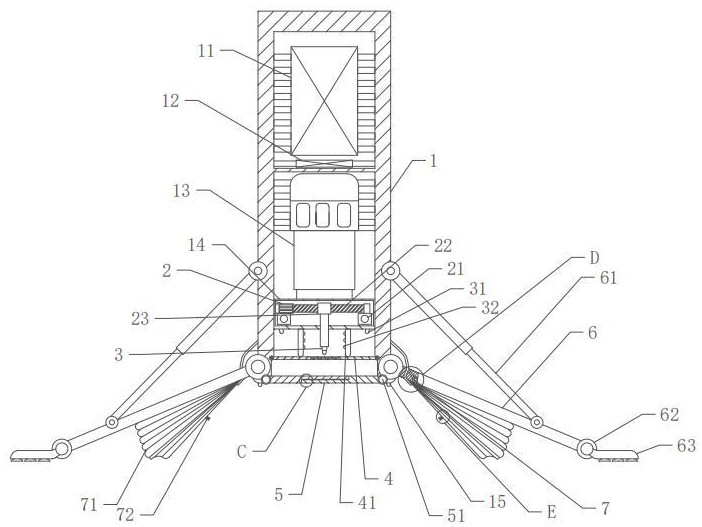
3、一种远程操控深海金属结构水下自动焊接装置,包括本体,本体内从上到下依次设有蓄电池、控制面板和焊接组件;
4、焊接组件包括第一电推杆和滑动块,第一电推杆的输出端与滑动块同轴连接,滑动块的底部设有焊接头、若干照射灯和第一摄像头,焊接头、照射灯和第一摄像头与蓄电池和控制面板电连接;
5、滑动块内设有用于推动焊接头移动的推动组件,推动组件并与控制面板和蓄电池电连接,本体底部设有用于遮挡本体内焊接头的闭合机构;
6、本体底部的外沿还设有密封组件,密封组件包括周向布置的若干支撑板,支撑板的中心处固定连接有支撑杆,支撑杆的一端与本体转动配合,支撑杆的另一端固定连接有驱动件,驱动件的输出轴一侧固定连接有边缘板;
7、支撑杆的顶部与本体之间铰接有用于推动支撑板转动的第二电推杆;支撑板的底部固定连接有气囊,气囊分别连通有第一电磁阀和抽吸管,抽吸管为三叉管,三叉管一端位于气囊下方,三叉管另一端分别连通有负压泵和二氧化碳压缩罐;边缘板底部固定连接有若干吸盘,三叉管另一端与气囊和吸盘连通,且气囊与三叉管之间连通有第二电磁阀,吸盘与三叉管之间连通有第三电磁阀,第一电磁阀、第二电磁阀和第三电磁阀均与控制面板电连接;
8、本体底部还设有若干第二摄像头,第二摄像头与控制面板电连接。
9、采用上述方案后实现了以下有益效果:
10、人工将本体中心处贴合在待焊区域上,通过第二电推杆带动支撑板与待焊区域的金属表面进行接触,再通过驱动件带动边缘板上的吸盘进行转动,使边缘板形成自适应的抓爪,再通过吸盘的负压将装置初步固定在钢铁表面上,从而能根据待焊区域进行自适应调整。
11、通过支撑板在待焊区域的金属表面形成拱形空间,通过气囊膨胀的填充作用以及抽吸管排出二氧化碳气体,带动拱形空间的水流进行不规则运动对金属表面进行冲刷,使拱形空间内的水流排出,便于后续形成密封环境,与直接对金属表面焊接相比,经冲刷后的金属表面的附着物减少,既便于后续图像中对焊缝的识别,又便于焊接过程中焊接头与待焊区域进行接触。
12、当气囊完全膨胀时,气囊与金属表面进行接触,再通过抽吸管对拱形空间内部进行抽吸,气囊内的拱形空间与外界形成压强差,使装置进一步固定在金属表面上,提高焊接过程的稳定性,并使拱形空间形成密封空间,便于后续焊接的进行。
13、当拱形空间形成密封空间时,工作人员通过第二摄像头确定拱形空间的环境,启动闭合机构打开本体内部,再通过第一电推杆推动滑块块推出焊接头、照射灯和第一摄像头,通过照射灯补充光照,与直接采用第二摄像头和第一摄像头进行采集图像数据相比,在密封空间内进行图像采集,能减少因水流的干扰而导致图像不清晰的问题;
14、工作人员通过第一摄像头的图像数据对待焊区域的裂缝进行判断,向控制面板发送对应的控制指令,控制面板基于控制指令带动焊接头进行相应的实现,从而对待焊区域进行焊接。
15、在焊接完成后,气囊内部的受焊接加热的气体对拱形内部进行填充,与直接采用外部空气对拱形内部进行填充相比,受焊接加热的气体既能平衡压强差使装置脱离金属表面,也能利用焊接加热后的气体对焊缝进行降温,便于焊缝进行逐步冷却,从而提高了焊接质量和效率。
16、进一步,位于气囊下方的三叉管的一端与气囊表面贴合,且三叉管一端与地面呈锐角倾斜布置。
17、有益效果:当气体从三叉管喷出时,气体沿气囊表面的倾斜向下带动水流变化,进而形成水漩涡对底部的待焊区域进行冲刷,便于后续焊接的进行。
18、进一步,闭合机构包括两个遮挡板和第一电机,第一电机沿本体中心处对称布置,且第一电机的输出轴与本体转动配合,第一电机的输出轴的一侧与遮挡板的一侧固定连接,遮挡板的直径大于滑动块的直径。
19、有益效果:通过第一电机带动遮挡板对本体内部进行遮挡,由于遮挡块的直径大于滑动块的直径,使遮挡块与本体之间形成台阶型的阶梯,使外界的水流不易进入本体内部。
20、进一步,闭合机构和滑动块之间设有内隔板,内隔板一端与本体转动配合有转轴,转轴上套设有扭簧,相邻的内隔板之间相抵,且本体内还开有用于放置内隔板的隔离腔,隔离腔的直径大于滑动块的直径;
21、滑动块的底部还设有若干推杆,推杆位于焊接头与第一摄像头之间,且推杆的高度大于焊接头的高度。
22、有益效果:滑动块通过推杆推动内隔板进行转动,使焊接头不与内隔板进行接触,当推杆不再抵住内隔板时,扭簧带动内隔板进行复位;而由于隔离腔的直径大于滑动块的直径,使内隔板与本体之间形成台阶型的阶梯,在闭合机构与滑动块之间形成一个隔离腔,使进入本体内部的水雾不与滑动块以及本体内部的机构直接进行接触。
23、进一步,推杆沿焊接头周向布置,照射灯均匀布置在推杆靠近焊接头的一侧。
24、有益效果:通过多个周向布置的照射灯以焊接头为中心进行照射,淡化焊接头形成影子,便于第一摄像头进行拍照取样,便于对焊缝进行识别。
25、进一步,相邻的遮挡板之间开有相互配合的台阶,相邻的台阶之间开有若干呈半圆弧型的卡槽。
26、有益效果:通过相邻的台阶之间开有若干呈半圆弧型的卡槽,增大水流的流动轨迹,使水流不易进入本体内部。
27、进一步,边缘板为可形变的橡胶板,支撑板为金属板。
28、有益效果:通过坚硬的支撑板作为骨架使装置固定在待焊区域上,通过可形变的边缘板便于与金属表面进行贴合,再通过边缘板上的吸盘吸附在金属表面上,便于实现装置的初步固定。
29、进一步,遮挡板和本体之间设有用于密封的橡胶圈。
30、有益效果:通过橡胶圈对遮挡板与本体之间的缝隙进行遮挡,使外界的水流不易进入本体内。
- 还没有人留言评论。精彩留言会获得点赞!