一种高速冲床自动取片机的制作方法
1.本实用新型涉及自动取片机技术领域,特别是一种高速冲床自动取片机。
背景技术:
2.随着产品开发,空调换热器孔数越来越多,换热器尺寸越来越大,而目前生产冲床取翅片全靠操作工弯腰取出,对员工身高要求高,劳作强度大,动作频繁容易出现腰肌劳损,且一人只能开一台冲床,操作人员投入多,典型四高岗位。
3.且人工取片过程中存在以下问题:
4.1.头部伸到接料针上方弯腰取片,存在刺伤脸部及眼睛安全隐患。
5.2.员人工手臂、肩膀等身体部位与翅片接触,翅片侧边锋利,且翅片油粘连,容易割伤手及皮肤过敏,工作环境恶劣。
6.3.操作员手握翅片容易产生倒片、散片等质量隐患。
技术实现要素:
7.为了克服现有技术的上述缺点,本实用新型提供一种高速冲床自动取片机。
8.本实用新型解决其技术问题所采用的技术方案是:一种高速冲床自动取片机,包括龙门架,所述龙门架安装有取料夹具,所述取料夹具与龙门架为滑动连接,所述龙门架的一侧位于取料位的上方,所述龙门架的另一侧位于翻转机构的上方,所述翻转机构安装于输送线上,所述输送线安装有升降平台和平移机构。
9.作为本实用新型的进一步改进:所述取料夹具包括支撑板,所述支撑板的下方设有夹紧机构,所述夹紧机构与支撑板为可升降连接。
10.作为本实用新型的进一步改进:所述支撑板固定有左右移动伺服电机,所述龙门架固定有左右移动齿条,所述左右移动伺服电机的转轴穿过支撑板连接有左右移动齿轮,所述左右移动齿轮与左右移动齿条啮合固定。在左右移动伺服电机的驱动作用以及左右移动齿轮和左右移动齿条的啮合作用下,可实现取料夹具在龙门架上的左右移动。
11.作为本实用新型的进一步改进:所述龙门架的上方固定有左右移动导轨,所述支撑板的下方设有与左右移动导轨适配的滑块。通过左右移动导轨与滑块相互配合可对取料夹具的左右移动起到导向作用。
12.作为本实用新型的进一步改进:所述取料夹具还包括上下移动伺服电机、上下移动丝杆和丝杆滑块,所述上下移动伺服电机和丝杆滑块安装于支撑板上,所述丝杆滑块与上下移动伺服电机为活动连接,所述上下移动丝杆贯穿于丝杆滑块内,所述上下移动丝杆与丝杆滑块为转动连接;所述上下移动丝杆的上端连接有第一升降板,所述上下移动丝杆的下端连接有第二升降板,所述夹紧机构安装于第二升降板的下方。
13.作为本实用新型的进一步改进:所述取料夹具还包括上下移动导柱和直线轴承,所述直线轴承竖直安装于支撑板上,所述上下移动导柱贯穿于直线轴承内,所述上下移动导柱与直线轴承滑动连接,所述上下移动导柱的上端与第一升降板连接,所述上下移动导
柱的下端与第二升降板连接。上下移动导柱和直线轴承相互配合可对取料机构起到导向作用。
14.作为本实用新型的进一步改进:所述夹紧机构包括夹爪支撑架、夹紧伺服电机、左旋丝杆和右旋丝杆,所述左旋丝杆与右旋丝杆通过丝杆联轴器连接,所述左旋丝杆、右旋丝杆、丝杆联轴器安装于夹爪支撑架上,所述左旋丝杆与夹紧伺服电机为转动连接,所述左旋丝杆上安装有左滑套,所述左滑套的下方安装有左夹爪,所述右旋丝杆上安装有右滑套,所述右滑套的下方安装有右夹爪。
15.作为本实用新型的进一步改进:所述翻转机构包括翻转平台和翻转伺服电机,所述翻转伺服电机和翻转平台为转动连接,所述翻转平台的上端设有翻转抱夹气缸。
16.作为本实用新型的进一步改进:所述翻转伺服电机的输出轴设有主动齿轮,翻转平台设有与主动齿轮适配的从动齿条,所述翻转伺服电机连接有翻转固定底座,所述翻转固定底座采用软性材料制成,所述翻转伺服电机采用90度旋转气缸。
17.作为本实用新型的进一步改进:所述输送线安装有升降伺服电机、蜗轮蜗杆传动轴、蜗轮蜗杆升降机、升降平台和平移机构,所述升降伺服电机与蜗轮蜗杆传动轴连接,所述涡轮蜗杆传动轴与蜗轮蜗杆升降机连接,所述蜗轮蜗杆升降机与升降平台连接,所述平移机构安装于升降平台上。
18.作为本实用新型的进一步改进:所述升降平台设有感应器,所述感应器与升降伺服电机连接。在输送线设计升降平台,翅片输送到位后,下降到人工方便搬运的高度,通过在升降平台增加感应器,每搬走一件两器,平台自动升降,保持统一高度,降低员工劳动强度。
19.与现有技术相比,本实用新型的有益效果是:
20.本实用新型可减少取片过程中员工的安全隐患及解决员工皮肤过敏等职业病患问题,改善工作环境,保证翅片质量,避免操作员手握翅片产生倒片、散片等质量隐患;本实用新型实施后实现自动取翅片,避免员工高劳动强度作业,解决四高岗位减少员工离职率,且配合自动穿管机使用,提高生产线自动化水平。
附图说明
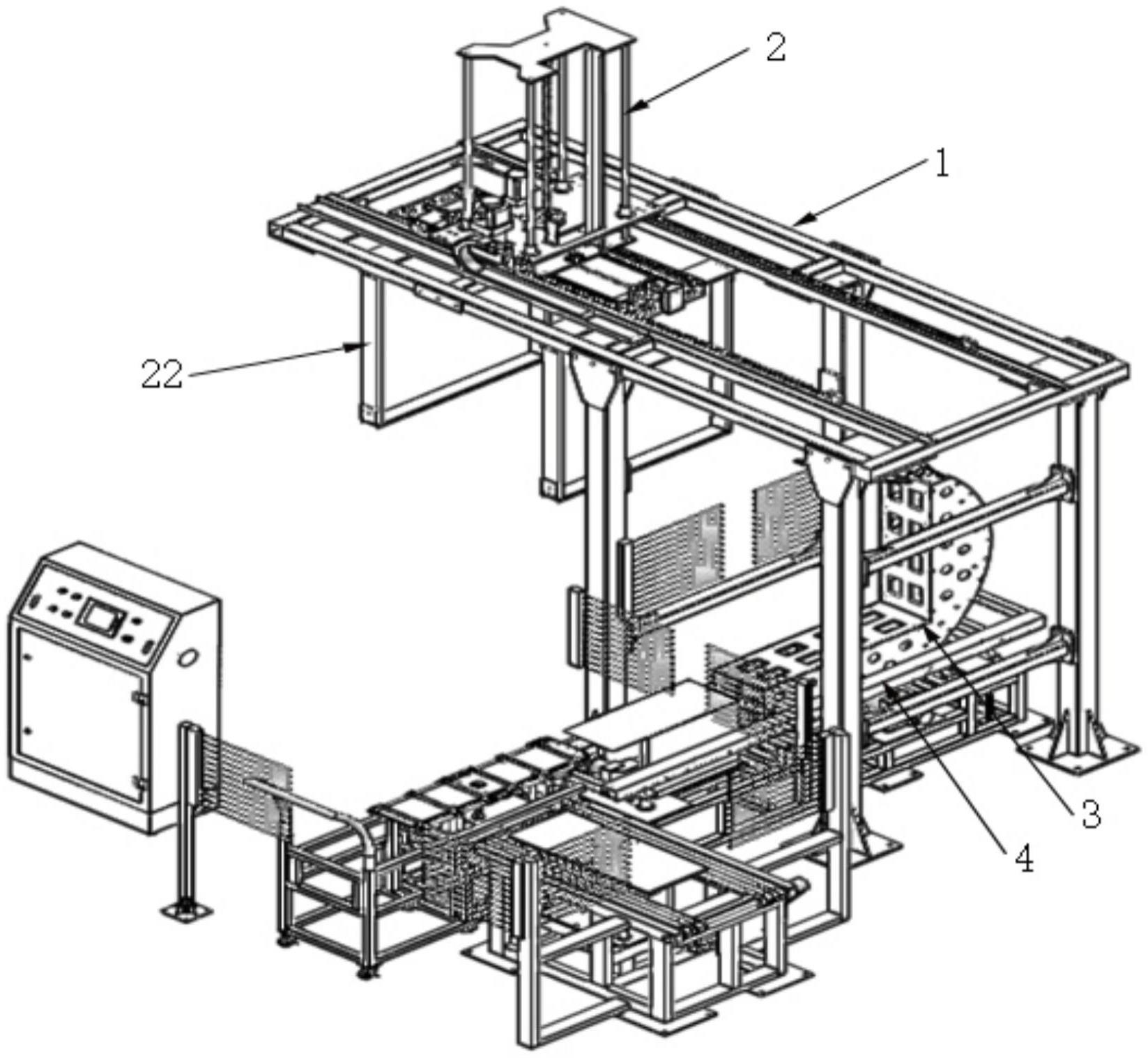
21.图1为本实用新型的结构示意图。
22.图2为本实用新型的取料夹具的结构示意图。
23.图3为本实用新型的夹紧机构的结构示意图。
24.图4为本实用新型的翻转机构的结构示意图。
25.附图标记:1、龙门架;2、取料夹具;3、翻转机构;4、输送线;21、支撑板;22、夹紧机构;23、左右移动伺服电机;24、上下移动伺服电机;25、上下移动丝杆;26、丝杆滑块;27、第一升降板;28、第二升降板;29、上下移动导柱;30、直线轴承;221、夹爪支撑架;222、夹紧伺服电机;223、左旋丝杆;224、右旋丝杆;225、丝杆联轴器;31、翻转平台;32、翻转伺服电机;33、翻转抱夹气缸;34、翻转固定底座;41、升降伺服电机;42、蜗轮蜗杆传动轴;43、蜗轮蜗杆升降机。
具体实施方式
26.在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,有关术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。现结合附图说明与实施例对本实用新型进一步说明:
27.请参阅图1-4,一种高速冲床自动取片机,包括龙门架1,所述龙门架安装有取料夹具2,所述取料夹具与龙门架为滑动连接,所述龙门架的一侧位于取料位的上方,所述龙门架的另一侧位于翻转机构3的上方,所述翻转机构安装于输送线4上,所述输送线安装有升降平台和平移机构。
28.所述取料夹具2包括支撑板21,所述支撑板的下方设有夹紧机构22,所述夹紧机构与支撑板为可升降连接。
29.所述支撑板固定有左右移动伺服电机23,所述龙门架固定有左右移动齿条,所述左右移动伺服电机的转轴穿过支撑板连接有左右移动齿轮,所述左右移动齿轮与左右移动齿条啮合固定。在左右移动伺服电机的驱动作用以及左右移动齿轮和左右移动齿条的啮合作用下,可实现取料夹具在龙门架上的左右移动。
30.所述龙门架的上方固定有左右移动导轨,所述支撑板的下方设有与左右移动导轨适配的滑块,通过左右移动导轨与滑块相互配合可对取料夹具的左右移动起到导向作用。
31.所述取料夹具还包括上下移动伺服电机24、上下移动丝杆25和丝杆滑块26,所述上下移动伺服电机和丝杆滑块安装于支撑板上,所述丝杆滑块与上下移动伺服电机为活动连接,所述上下移动丝杆贯穿于丝杆滑块内,所述上下移动丝杆与丝杆滑块为转动连接;所述上下移动丝杆的上端连接有第一升降板27,所述上下移动丝杆的下端连接有第二升降板28,所述夹紧机构安装于第二升降板的下方。
32.上下移动伺服电机通过丝杆滑块带动上下移动丝杆转动,上下移动丝杆带动第一升降板和第二升降板上下移动。
33.所述取料夹具还包括上下移动导柱29和直线轴承30,所述直线轴承竖直安装于支撑板上,所述上下移动导柱贯穿于直线轴承内,所述上下移动导柱与直线轴承滑动连接,所述上下移动导柱的上端与第一升降板连接,所述上下移动导柱的下端与第二升降板连接。上下移动导柱和直线轴承相互配合可对取料机构起到导向作用。
34.所述直线轴承设有4个,4个直线轴承位于支撑板的四角,所述上下移动导柱设有4根,上下移动导柱贯穿于直线轴承内,上下移动导柱与直线轴承滑动连接。采用4根上下移动导柱和直线轴承相互配合,导向性好,确保取料夹具以及取料夹具所夹持的工件能平稳移动。
35.所述夹紧机构22包括夹爪支撑架221、夹紧伺服电机222、左旋丝杆223和右旋丝杆224,所述左旋丝杆与右旋丝杆通过丝杆联轴器225连接,所述左旋丝杆、右旋丝杆、丝杆联轴器安装于夹爪支撑架上,所述左旋丝杆与夹紧伺服电机为转动连接,所述左旋丝杆上安装有左滑套,所述左滑套的下方安装有左夹爪,所述右旋丝杆上安装有右滑套,所述右滑套的下方安装有右夹爪。
36.通过控制夹紧伺服电机,即可控制左滑套和右滑套的相互靠近或相互远离,从而控制左夹爪和右夹爪的相互靠近或相互远离,从而实现对产品的夹取。
37.通过取料夹具进行上下料作业,取料夹具采用夹紧伺服电机独立施加夹持力,同时采用独立传感器输出位移信号,通过夹爪机构的结构设计,可解决受力不均引起的产品倒片问题。
38.夹紧机构在抓取翅片提升时进行程序开发轻微左右移动抖动功能,保证翅片与料针接触分离,解决摩擦问题。
39.所述翻转机构3包括翻转平台31和翻转伺服电机32,所述翻转伺服电机和翻转平台为转动连接,所述翻转平台的上端设有翻转抱夹气缸33。
40.翻转伺服电机32的输出轴设有主动齿轮,翻转平台设有与主动齿轮适配的从动齿条,所述翻转伺服电机连接有翻转固定底座34,所述翻转固定底座采用软性材料制成,所述翻转伺服电机采用90度旋转气缸。
41.通过采用90度旋转气缸,控制翻转固定底座软性材质的工作与收起,保证翻转平台高速旋转下的组件平衡问题,规避因组件未成型前松散状态导致的铜管脱落、组件脱落异常。
42.翻转机构通过翻转伺服电机带动主动齿轮和从动齿条的运动模式,将翻转平台上的翅片翻转90度,方便穿管机单片上料。
43.所述输送线4安装有升降伺服电机41、蜗轮蜗杆传动轴42、蜗轮蜗杆升降机43、升降平台和平移机构,所述升降伺服电机与蜗轮蜗杆传动轴连接,所述涡轮蜗杆传动轴与蜗轮蜗杆升降机连接,所述蜗轮蜗杆升降机与升降平台连接,所述平移机构安装于升降平台上。
44.翅片翻转完成后,升降平台将翅片顶起脱离翻转平台后,平移机构将翅片搬运脱离翻转平台并搬运至下一工位。
45.所述升降平台设有感应器,所述感应器与升降伺服电机连接。
46.在输送线设计升降平台,翅片输送到位后,下降到人工方便搬运的高度,通过在升降平台增加感应器,每搬走一件两器,平台自动升降,保持统一高度,降低员工劳动强度。
47.本实用新型采用自编程序、可活动室固定机构,取料夹具抓取组件后,实现边板自动防护,避免边板脱落造成的组件报废问题。
48.本实用新型应用多个组合气缸、压力传感器,检测物料是否到位,组件挡条实现自动松、紧,保证产品组件的准确定位。
49.本实用新型通过翻转机构,实现翅片纵、横向等方向的规范性平稳摆放,解决惯性冲击导致翅片散乱等问题;通过设有取料机构实现物料的提升下降动作,夹紧机构可开合运动,从而实现对物料的抓取。
50.本实用新型可减少取片过程中员工的安全隐患及解决员工皮肤过敏等职业病患问题,改善工作环境,保证翅片质量,避免操作员手握翅片产生倒片、散片等质量隐患;本实用新型实施后实现自动取翅片,避免员工高劳动强度作业,解决四高岗位减少员工离职率,且配合自动穿管机使用,提高生产线自动化水平。
51.本实用新型的工作原理:
52.1.取料夹具采用左右移动伺服电机带动左右移动齿轮和左右移动齿条的运动模
式,精准移动至取料位上方,采用上下移动伺服电机带动上下移动丝杆的运动模式提前打开夹紧机构,等待翅片冲压完成;
53.2.翅片冲压完成后,取料夹具通过上下移动伺服电机加上下移动丝杆,以打开姿态下降至翅片取料位;
54.3.取料夹具通过上下移动伺服电机加上下移动丝杆执行取料抱夹动作;
55.4.取料夹具夹持住物料并提升,使翅片脱离集料架。提升时进行程序开发轻微左右移动抖动功能,保证翅片与料针接触分离,解决摩擦问题;
56.5.上升至安全高度后,取料夹具将抱夹物料搬运至翻转机构;
57.6.翅片放至翻转机构后,通过翻转抱夹气缸将物料夹紧,取料夹具松开物料并往上提升,再移动至取料等待位;
58.7.翻转机构通过翻转伺服电机带动主动齿轮和从动齿条的运动模式,将翻转平台上的翅片翻转90度,方便穿管机单片上料;
59.8.翻转完成后,升降平台将翅片顶起脱离翻转平台后,平移机构将翅片搬运脱离翻转平台并搬运至下一工位。
60.以上实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型实施例技术方案的范围,其均应涵盖在本实用新型的权利要求和说明书的范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1