一种弯辊力控制方法、装置、介质、电子设备与流程
所属的技术人员能够理解,本技术的各个方面可以实现为系统、方法或程序产品。因此,本技术的各个方面可以具体实现为以下形式,即:完全的硬件实施方式、完全的软件实施方式(包括固件、微代码等),或硬件和软件方面结合的实施方式,这里可以统称为“电路”、“模块”或“系统”。下面参照图4来描述根据本技术的这种实施方式的电子设备400。图4显示的电子设备400仅仅是一个示例,不应对本技术实施例的功能和使用范围带来任何限制。如图4所示,电子设备400以通用计算设备的形式表现。电子设备400的组件可以包括但不限于:上述至少一个处理单元410、上述至少一个存储单元420、连接不同系统组件(包括存储单元420和处理单元410)的总线430。其中,所述存储单元存储有程序代码,所述程序代码可以被所述处理单元410执行,使得所述处理单元410执行本说明书上述“实施例方法”部分中描述的根据本技术各种示例性实施方式的步骤。存储单元420可以包括易失性存储单元形式的可读介质,例如随机存取存储单元(ram)421和/或高速缓存存储单元422,还可以进一步包括只读存储单元(rom)423。存储单元420还可以包括具有一组(至少一个)程序模块425的程序/实用工具424,这样的程序模块425包括但不限于:操作系统、一个或者多个应用程序、其它程序模块以及程序数据,这些示例中的每一个或某种组合中可能包括网络环境的实现。总线430可以为表示几类总线结构中的一种或多种,包括存储单元总线或者存储单元控制节点、外围总线、图形加速端口、处理单元或者使用多种总线结构中的任意总线结构的局域总线。电子设备400也可以与一个或多个外部设备1200(例如键盘、指向设备、蓝牙设备等)通信,还可与一个或者多个使得用户能与该电子设备400交互的设备通信,和/或与使得该电子设备400能与一个或多个其它计算设备进行通信的任何设备(例如路由器、调制解调器等等)通信。这种通信可以通过输入/输出(i/o)接口450进行。并且,电子设备400还可以通过网络适配器460与一个或者多个网络(例如局域网(lan),广域网(wan)和/或公共网络,例如因特网)通信。如图所示,网络适配器460通过总线430与电子设备400的其它模块通信。应当明白,尽管图中未示出,可以结合电子设备400使用其它硬件和/或软件模块,包括但不限于:微代码、设备驱动器、冗余处理单元、外部磁盘驱动阵列、raid系统、磁带驱动器以及数据备份存储系统等。通过以上的实施方式的描述,本领域的技术人员易于理解,这里描述的示例实施方式可以通过软件实现,也可以通过软件结合必要的硬件的方式来实现。因此,根据本技术实施方式的技术方案可以以软件产品的形式体现出来,该软件产品可以存储在一个非易失性存储介质(可以是cd-rom,u盘,移动硬盘等)中或网络上,包括如果干指令以使得一台计算设备(可以是个人计算机、服务器、终端装置、或者网络设备等)执行根据本技术实施方式的方法。此外,上述附图仅是根据本技术示例性实施例的方法所包括的处理的示意性说明,而不是限制目的。易于理解,上述附图所示的处理并不表明或限制这些处理的时间顺序。另外,也易于理解,这些处理可以是例如在多个模块中同步或异步执行的。应当理解的是,本技术并不局限于上面已经描述并在附图中示出的精确结构,并且可以在不脱离其范围执行各种修改和改变。本技术的范围仅由所附的权利要求来限制。
背景技术:
1、弯辊系统的作用是改变带钢板形,其中有几种带钢的板形需要通过弯辊系统来处理,例如,双边浪,单边四分之一浪。因此,弯辊力的大小对带钢板形有着最要的影响,现有的方法实际生产过程中每卷带钢都按照预设设定的弯辊值来进行生产,但是此时可能由于带钢的规格还有轧制力大小的变化而使得固定的弯辊力无法对带钢板形进行有效的处理,现有方法存在着带钢轧制不够精准的问题。
技术实现思路
1、本技术提供了一种弯辊力控制方法、装置、介质、电子设备,可以通过光整机的运行参数和带钢的规格参数来确定光整机的弯辊力调整参数,进而对光整机的弯辊力进行控制,来提高带钢轧制的精准性。
2、本技术的其他特性和优点将通过下面的详细描述变得显然,或部分地通过本技术的实践而习得。
3、根据本技术实施例的一个方面,提供了一种弯辊力控制,所述方法包括:
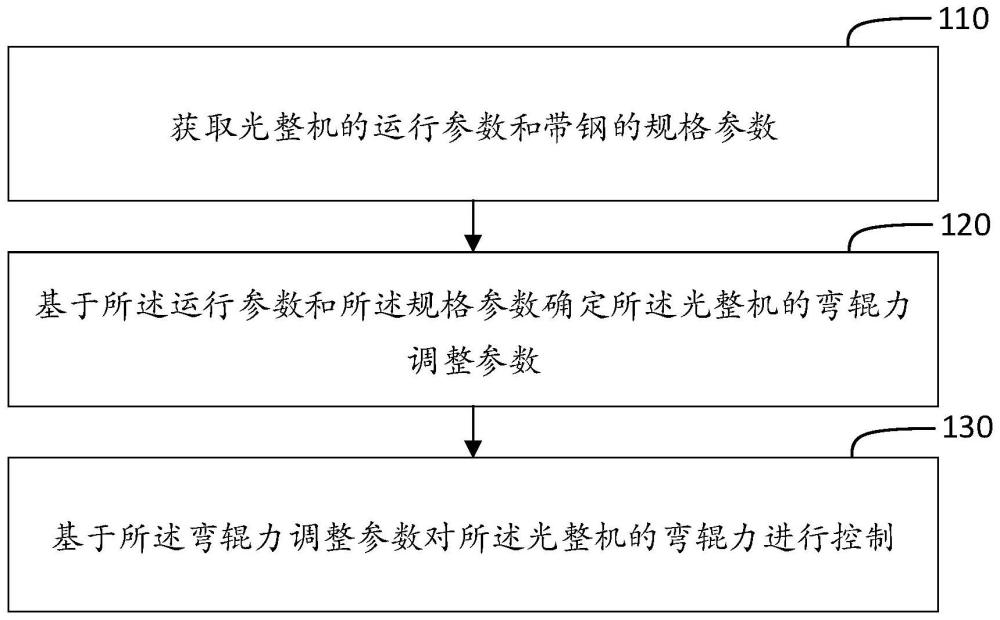
4、获取光整机的运行参数和带钢的规格参数;
5、基于所述运行参数和所述规格参数确定所述光整机的弯辊力调整参数;
6、基于所述弯辊力调整参数对所述光整机的弯辊力进行控制。
7、在本技术的一个实施例中,基于前述方案,所述基于所述运行参数和所述规格参数确定所述光整机的弯辊力调整参数,包括:
8、基于所述运行参数获取所述光整机的当前弯辊力值;
9、基于所述运行参数和所述规格参数确定所述光整机的弯辊力附加值;
10、基于所述当前弯辊力值和所述弯辊力附加值确定所述弯辊力调整参数。
11、在本技术的一个实施例中,基于前述方案,所述基于所述运行参数和所述规格参数确定所述光整机的弯辊力附加值,包括:
12、基于所述运行参数获取所述光整机的轧制力和速度;
13、根据所述规格参数获取所述带钢的宽度;
14、基于所述轧制力、所述速度和所述宽度确定所述弯辊力附加值。
15、在本技术的一个实施例中,基于前述方案,所述基于所述轧制力、所述速度和所述宽度确定所述弯辊力附加值,包括:
16、基于所述轧制力以及预设的初始轧制力确定所述光整机的目标弯辊力;
17、基于所述速度和预设的速度阈值确定所述目标弯辊力的第一调整系数;
18、基于所述宽度确定所述目标弯辊力的第二调整系数;
19、基于所述目标弯辊力、所述第一调整系数和所述第二调整系数确定所述弯辊力附加值。
20、在本技术的一个实施例中,基于前述方案,所述基于所述轧制力以及预设的初始轧制力确定所述光整机的目标弯辊力,包括:
21、若所述轧制力高于所述初始轧制力,确定所述轧制力与所述初始轧制力的第一轧制力差值;
22、基于所述第一轧制力差值、预设的第一弯辊力和预设的第一轧制力阈值确定所述目标弯辊力;
23、若所述轧制力低于所述初始轧制力,确定所述轧制力与所述初始轧制力的第二轧制力差值;
24、基于所述第二轧制力差值、预设的第二弯辊力和预设的第二轧制力阈值确定所述目标弯辊力。
25、在本技术的一个实施例中,基于前述方案,所述速度阈值包括第一速度阈值和第二速度阈值;所述基于所述速度和预设的速度阈值确定所述目标弯辊力的第一调整系数,包括:
26、基于所述速度、所述第一速度阈值和所述第二速度阈值确定所述第一调整系数。
27、在本技术的一个实施例中,基于前述方案,所述基于所述宽度确定所述目标弯辊力的第二调整系数,包括:
28、基于所述宽度在预设的宽度-系数映射关系表中查找与所述宽度对应的第二调整系数。
29、根据本技术实施例的一个方面,提供了一种弯辊力控制装置,所述装置包括获取单元,用于获取光整机的运行参数和带钢的规格参数;确定单元,用于基于所述运行参数和所述规格参数确定所述光整机的弯辊力调整参数;控制单元,用于基于所述弯辊力调整参数对所述光整机的弯辊力进行控制。
30、根据本技术实施例的一个方面,提供了一种计算机可读存储介质,其上存储有计算机程序,该计算机程序包括可执行指令,当该可执行指令被处理器执行时,实现如上述实施例中所述的弯辊力控制方法。
31、根据本技术实施例的一个方面,提供了一种电子设备,包括:一个或多个处理器;存储器,用于存储所述处理器的可执行指令,当所述可执行指令被所述一个或多个处理器执行时,使得所述一个或多个处理器实现如上述实施例中所述的弯辊力控制方法。
32、本技术通过获取得到的光整机的运行参数和带钢的规格参数来确定光整机的弯辊力调整参数,可以根据不同的光整机的运行参数以及带钢的规格参数确调整对应的弯辊力调整参数,进而通过弯辊力调整参数来对带钢进行控制,能够在带钢的轧制过程中自动调整弯辊力,进而防止带钢产生浪形等问题,进而提高带钢轧制的稳定性以及对弯辊力控制的精准性。
33、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本技术。
- 还没有人留言评论。精彩留言会获得点赞!