一种激光焊机及其焊接方法与流程
本发明涉及焊机,更具体地说,涉及一种激光焊机及其焊接方法。
背景技术:
1、手持激光焊机是一种新一代的激光焊接设备,具有非接触式焊接的特点。它的工作原理是利用激光的辐射能量来实现有效焊接,通过激励激光活性介质,使其在谐振腔中往复振荡,从而形成受激辐射光束,当光束与工件接触时,其能量被工件吸收,在温度达到材料熔点时便可进行焊接,而现有公开文献中,中国专利公开号cn214054061u的专利公开了一种激光焊机,则通过下支耳部上设有与一号螺纹孔对应的通孔,上支耳部和下支耳部通过一号螺栓固定,下滑套下方设有固定套,固定套内设有可在固定套内竖向位移的焊枪,并通过二号螺栓固定,握持把手使焊枪沿着横梁滑动进行焊接,操作方便,限制竖向位移,避免出现焊缝深浅不一的现象,使焊缝更均匀,提升了焊接效果;但是该激光焊机在使用时还存在以下缺陷;
2、焊机在对工件进行焊接时,由于焊接过程中需要单个焊枪部位对工件部位实现焊接,而焊接间隙位置都是各不相同的,同时焊接的缝隙倾斜角度也是各不相同的,焊接人员自己调节会导致单个焊枪作业位置发生改变,难以精确调节到指定位置,焊接精确性较差,为此提供一种激光焊机及其焊接方法。
技术实现思路
1、为了克服现有技术的上述缺陷,本发明提供一种激光焊机及其焊接方法。
2、为实现上述目的,本发明提供如下技术方案:
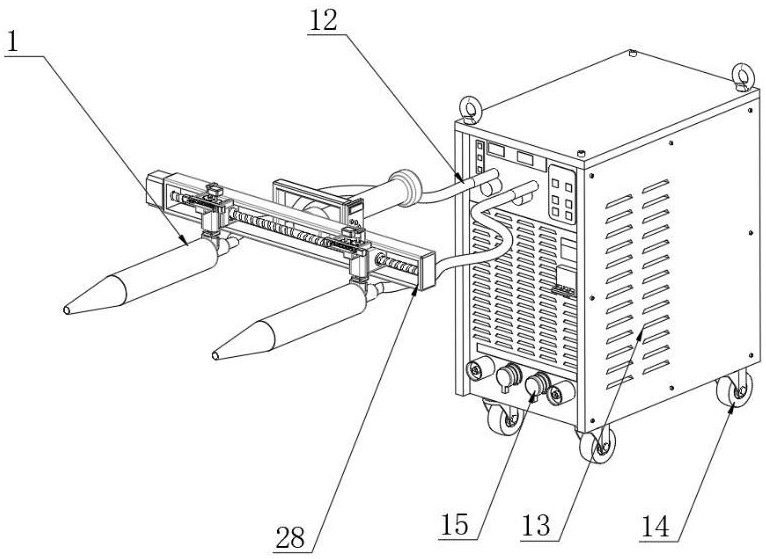
3、一种激光焊机,包括两个激光焊枪,每个所述激光焊枪的顶端均固定连接有联动转块,所述联动转块的顶端安装有精确调节机构;所述精确调节机构包括安装在联动转块顶端的联动转轴,所述联动转轴的外壁通过轴承转动连接有套接支板,所述联动转轴的外壁且位于套接支板上方位置固定连接有联动齿环,在所述联动齿环的外壁一侧啮合传动连接有驱动齿环;所述驱动齿环的内壁同圆心固定连接有驱动轴杆,在所述驱动轴杆的顶端同轴传动连接有驱动电机,所述驱动电机的一侧设有从上到下依次等距排列的l形支板和角度传感器,所述传感轴分别与联动转轴的顶端和角度传感器的传感端之间固定连接;两个所述套接支板的前方均焊接有支撑板,所述支撑板的顶端安装有精确锁紧组件;两个所述套接支板的后方均焊接有调节套块,在其中一个所述调节套块的一侧安装有精确调节组件。
4、优选地,所述联动转轴分别与联动转块和l形支板底端之间固定连接,且所述联动转轴和l形支板 均由不锈钢材质制成,所述l形支板和角度传感器均与驱动电机之间固定连接,所述角度传感器用于对传感轴旋转角度进行传感,所述联动齿环和驱动齿环的底端均与套接支板顶端之间转动连接,且所述联动齿环的上表面与驱动齿环的上表面处于同一水平面,两个所述激光焊枪的一端部均固定连接有连接线,所述连接线的一端部固定安装有焊机;所述焊机的底端且靠近其四拐角线位置均固定连接有移动轮;所述焊机的一侧且位于连接线下方固定连接有开关。
5、根据上述技术方案在使用时,通过在控制器上设定两个激光焊枪的旋转角度,控制器驱动着驱动电机输出端带动驱动轴杆旋转,驱动齿环在旋转过程中带动联动齿环实现啮合旋转,联动齿环携带联动转轴在套接支板内部旋转,而激光焊枪在旋转过程中,联动转轴带动传感轴实现旋转,传感轴与角度传感器传感端实现传感旋转,当角度传感器传感的角度数值与控制器设定的角度数值相同时,则通过控制器关闭驱动电机。
6、优选地,所述精确锁紧组件包括安装在支撑板顶端的矩形框板;所述矩形框板的内壁通过轴承转动连接有挤压螺杆,所述挤压螺杆的外壁从左到右依次螺纹连接有两个螺纹套块,在其中一个所述螺纹套块的一侧连接有第一距离传感器,所述第一距离传感器的一侧安装有感应块,所述矩形框板的一侧固定连接有用于驱动挤压螺杆旋转的减速电机;两个所述螺纹套块的后方均固定连接有连接支板,两个所述连接支板的相邻一侧均粘接固定有橡胶垫板,两个所述螺纹套块的外壁均与矩形框板内壁水平滑动连接,所述挤压螺杆的外壁两螺纹相反且对称设置,所述第一距离传感器和感应块分别与两个螺纹套块一一对应固定连接。
7、根据上述技术方案在使用时,通过支撑板对矩形框板提供支撑力,矩形框板上的减速电机产生驱动时,减速电机驱动挤压螺杆在矩形框板内部旋转,同时挤压螺杆带动两个螺纹套块在螺纹的作用下相互靠近,连接支板带动橡胶垫板移动,两个橡胶垫板分别挤压锁紧在联动齿环的外壁以及驱动齿环的外壁,同时第一距离传感器与感应块实现距离传感,当传感的距离为控制器设定距离时,则通过控制器关闭减速电机。
8、优选地,所述精确调节组件包括安装在其中一个调节套块一侧的距离感应块,所述距离感应块的一侧安装有第二距离传感器;所述第二距离传感器用于传感距离感应块移动距离,所述距离感应块和第二距离传感器分别与两个调节套块一一对应固定连接;所述调节套块的内壁安装有联动螺杆,在所述调节套块的外壁水平滑动连接有导向滑框,所述导向滑框的外壁一侧固定连接有用于驱动联动螺杆旋转的传动电机,所述导向滑框的后方焊接有握把,在所述握把的下方安装有与导向滑框固定连接的握柱,所述握把的一侧通过热熔胶粘接固定有控制器,两个所述调节套块内壁均与联动螺杆外壁螺纹连接,所述联动螺杆的外壁两螺纹相反且对称开设。
9、根据上述技术方案在使用时,在控制器上设定焊接间距位置,传动电机带动联动螺杆在导向滑框内部旋转,联动螺杆带动两个调节套块在螺纹的作用下沿着导向滑框内部相互滑动靠近,联动转轴带动联动转块使激光焊枪实现移动,激光焊枪带动连接线移动,两个激光焊枪之间的距离能够实现精确调节,距离感应块向第二距离传感器位置实现靠近,当第二距离传感器传感的距离为控制器设定的距离时,则通过控制器关闭传动电机。
10、本发明还提供一种激光焊接方法,包括以下步骤:
11、步骤一、焊接间距调节时,利用精确调节组件使两个激光焊枪按照指定距离进行调节,完成两个激光焊枪之间距离调节;
12、步骤二、焊接角度位置调节时,通过精确调节机构对两个激光焊枪按照指定角度数值实现微调,直到调节到指定角度数值;
13、步骤三、精确锁紧时,通过精确锁紧组件,按照指定锁紧距离对两个激光焊枪的旋转角度实现锁紧;
14、步骤四、精确锁紧时,焊接人员对调节完毕的两个激光焊枪进行移动,两个激光焊枪手持后焊接到工件两条间隙上,完成激光焊接操作。
15、本发明的技术效果和优点:
16、本发明通过精确调节机构使控制器驱动着驱动电机输出端带动驱动轴杆旋转,驱动轴杆带动驱动齿环实现旋转,驱动齿环在旋转过程中带动联动齿环实现啮合旋转,联动齿环携带联动转轴在套接支板内部旋转,传感轴与角度传感器传感端实现传感旋转,当角度传感器传感的角度数值与控制器设定的角度数值相同时,则通过控制器关闭驱动电机,能够对两个激光焊枪实现精确角度调节,在调节过程中能够实现同步精确调节,焊接人员可以按照指定角度数值同步调节两个焊枪作业位置,可以精确调节到指定位置,焊接精确性更好;
17、本发明采用精确调节组件启动传动电机带动联动螺杆在导向滑框内部旋转,两个调节套块在螺纹的作用下沿着导向滑框内部相互滑动靠近,联动转轴带动联动转块使激光焊枪实现移动,激光焊枪带动连接线移动,调节套块在移动时能够带动距离感应块实现移动,距离感应块向第二距离传感器位置实现靠近,第二距离传感器传感的距离为控制器设定的距离时,则通过控制器关闭传动电机,能够对两个激光焊枪间距实现同步精确调节,精确实现调节焊接,焊接精确性更好;
18、本发明利用精确锁紧组件使矩形框板上的减速电机产生驱动时,减速电机驱动挤压螺杆在矩形框板内部旋转,挤压螺杆带动两个螺纹套块在螺纹的作用下相互靠近,连接支板带动橡胶垫板移动,两个橡胶垫板分别挤压锁紧在联动齿环的外壁以及驱动齿环的外壁,第一距离传感器与感应块实现距离传感,能够按照指定距离对驱动齿环和联动齿环实现锁紧,同步锁紧避免驱动齿环和联动齿环旋转,角度进行精确限位焊接,焊接精确性更好;
19、通过上述多个作用的相互影响,首先对两个激光焊枪焊接距离实现同步精确调节,再对两个激光焊枪焊接角度位置实现同步精确调节,最后同步锁紧避免驱动齿环和联动齿环旋转,综上激光焊机能够对两个激光焊枪按照指定间隔距离精确调节,以及角度距离精确同步调节,激光焊机焊接更加精确。
- 还没有人留言评论。精彩留言会获得点赞!