一种隧道型钢拱架切割机构及控制系统的制作方法
本发明涉及型钢拱架加工领域,尤其涉及一种隧道型钢拱架切割机构及控制系统。
背景技术:
1、隧道型钢拱架是应用于隧道工程中的重要组件,通常用于支护结构和承载荷载,以确保隧道的稳定和安全;
2、目前隧道型钢拱架弯曲后定尺切割有两种形式:
3、一是,通过一台切割机器人并附带配套切割机器人用的红外线检测系统及等离子切割装置来实现切割线检测及等离子切割;
4、二是,将带锯床的底座上安装可人工手动调整的纵向移动、横向移动和旋转的轨道,由人工测量出型钢拱架需要切割的位置并划线,再将带锯床通过轨道手动调整至切割位置,后续切割每一根型钢拱架均在此位置切割,不能实时根据每根型钢拱架的偏差进行调整;
5、例如,授权公告号为cn211777489u的中国专利公开的一种钢拱架切割划线定位装置,包括工字钢a和切割划线定位架,所述切割划线定位架安装在工字钢a的前侧上端外壁上,所述工字钢a的前侧设置有工字钢b,所述切割划线定位架上设置有第一定位板,所述第一定位板的后侧设置有第二定位板,所述第一定位板与第二定位板的对向内壁之间设置有横连杆,所述第一定位板与第二定位板的下端设置有限位挡板;
6、二者属于成熟产品,但是应用于隧道型钢拱架切割加工中,存在诸多缺陷,其一,切割机器人采用红外检测系统,检测工字钢边缘,其会受光线强、弱影响,检测数据偏差大,使得自动获取到的切割位置偏离实际切割位置,致使切割线歪斜,影响后续与端板的焊接,导致整品拱架拼装误差大;
7、其二,隧道型钢拱架的加工情况复杂,其中型钢拱架规格、长短变化很频繁,需要人工做对应调整或调整切割机器人参数,一般切割机器人厂家的专业技术人员更换一种不同规格长短的拱架需要调整数小时,严重影响加工效率,如果是施工工人操作则没办法调整。
技术实现思路
1、有鉴于此,本发明的目的在于提出一种隧道型钢拱架切割机构及控制系统,以实现自动寻找切割点位。
2、为达到上述技术目的,本发明提供了一种隧道型钢拱架切割机构,包括y轴丝杠传动组、x轴丝杠传动组、c轴传动机构、切割机构主架体和切割机构,所述x轴丝杠传动组与y轴丝杠传动组的输出端固定连接,所述y轴丝杠传动组用于驱动x轴丝杠传动组沿y轴平移,所述c轴传动机构与x轴丝杠传动组的输出端固定连接,所述x轴丝杠传动组用于驱动c轴传动机构沿x轴平移,所述c轴传动机构的输出端固定有切割机构主架体,所述切割机构固定于切割机构主架体上,所述c轴传动机构用于带动切割机构主架体水平转动。
3、优选地,所述y轴丝杠传动组底部固定有对其进行支撑的y轴底座,所述y轴底座表面固定有驱动y轴丝杠传动组的y轴驱动,所述y轴驱动的输出端与y轴丝杠传动组连接固定。
4、优选地,所述x轴丝杠传动组底部固定有对其进行支撑的x轴底座,所述x轴底座表面固定有驱动x轴丝杠传动组的x轴驱动,所述x轴驱动的输出端与y轴丝杠传动组连接固定。
5、优选地,所述x轴底座与y轴底座滑动连接,所述x轴丝杠传动组底部固定有y轴滑块,所述y轴底座表面固定有y轴导轨,所述y轴滑块与y轴导轨滑动连接。
6、优选地,所述c轴传动机构包括:c轴底座,底部与x轴底座滑动连接;c轴从动齿轮,与c轴底座固定连接;切割机构连接板,与c轴底座转动连接,所述切割机构主架体固定于切割机构连接板上;c轴驱动,固定于切割机构连接板上;c轴主动齿轮,与c轴从动齿轮啮合,且所述c轴主动齿轮与c轴驱动的输出端固定连接。
7、优选地,所述x轴底座表面固定有x轴导轨,所述c轴底座底部固定有x轴滑块,所述x轴滑块与x轴导轨滑动连接。
8、优选地,所述切割机构包括:切割底座,固定于切割机构主架体上;高速冷切锯底架,与切割底座滑动连接;切割进给驱动,固定于切割底座上,且所述切割进给驱动的输出端与高速冷切锯底架固定连接;高速锯驱动,固定于高速冷切锯底架上;高速冷切锯,与高速锯驱动的输出端固定连接。
9、优选地,所述高速冷切锯底架上固定有锯盘保护传感器,所述高速冷切锯上固定锯盘感应块。
10、优选地,所述切割机构主架体上固定有夹持机构,所述夹持机构包括:夹紧机构龙门架,固定于切割机构主架体上,夹紧压板,与夹紧机构龙门架滑动连接;夹紧油缸,固定于夹紧机构龙门架上,且所述夹紧油缸的输出端与夹紧压板固定连接;夹紧导向杆,固定于夹紧机构龙门架上,并与夹紧机构龙门架滑动连接,所述夹紧压板靠近切割位检测传感器的一端固定有切割位检测传感器护罩。
11、优选地,所述切割机构主架体上固定有切割位检测传感器,用于采集所述切割位检测传感器到型钢拱架的内弧面的距离值。
12、一种隧道型钢拱架切割控制系统,如上述一种隧道型钢拱架切割机构,包括:
13、分析模块,预采集型钢拱架切割数据,将距离值和切割数据输入训练完成的理论距离值模型,输出型钢拱架内边缘与切割位检测传感器7检测发射点的理论距离值;
14、第一位移模块,控制y轴丝杠传动组和x轴丝杠传动组驱动c轴传动机构沿x轴及y轴同时平移,直至型钢拱架与切割位检测传感器检测发射点距离与理论距离值相符,所述y轴丝杠传动组和x轴丝杠传动组停止工作,并将此时x轴坐标与y轴坐标标记为初始坐标;
15、第二位移模块,控制c轴驱动工作,所述c轴驱动通过c轴主动齿轮转动,使c轴主动齿轮在c轴从动齿轮上±20°旋转,切割位检测传感器同步旋转,并实时采集与型钢拱架内弧面的实时距离值;
16、校对模块,取实时距离值中最小值作为切割机构切割位。
17、优选地,理论距离值模型训练方法包括:
18、预采集g组历史切割数据,切割数据包括型钢拱架弧长、型钢拱架弧度及型钢拱架半径以及型钢拱架内弧面与切割位检测传感器检测发射点的距离值;
19、将一组切割数据与切割数据对应的型钢拱架内弧面与切割位检测传感器检测发射点的距离值,转换为一组特征向量,
20、将特征向量作为理论距离值模型的输入,所述理论距离值模型以每组切割数据的预测型钢拱架内弧面与切割位检测传感器检测发射点的距离值为输出,以最小化所有型钢拱架内弧面与切割位检测传感器检测发射点的距离值的预测准确度之和作为训练目标;对理论距离值模型进行训练,直至预测准确度之和达到收敛时停止训练。
21、从以上技术方案可以看出,本技术具有以下有益效果:
22、1:通过y轴丝杠传动组、x轴丝杠传动组和c轴传动机构配合,可自动调整切割机构位置,并通过切割位检测传感检测距离确定切割位,实现自动精确切割。
23、2:针对更换加工不同规格长短的型钢拱架所需调整时间过长的问题,通过自动切割,提高加工效率。
24、附图说明
25、为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
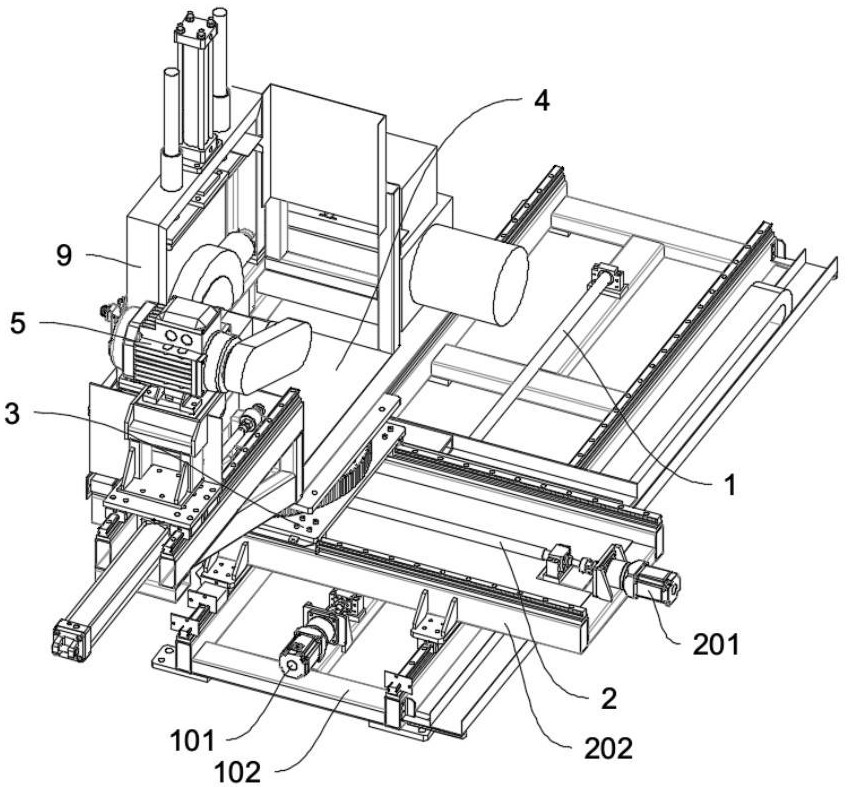
26、图1为本发明提供的一种隧道型钢拱架切割机构的整体结构示意图;
27、图2为本发明提供的一种隧道型钢拱架切割机构的局部一结构示意图;
28、图3为本发明提供的一种隧道型钢拱架切割机构的局部二结构示意图;
29、图4为本发明提供的一种隧道型钢拱架切割机构的夹持机构整体结构示意图;
30、图5为本发明提供的一种隧道型钢拱架切割机构的型钢冷弯机俯视示意图;
31、图6为本发明提供的一种隧道型钢拱架切割机构的型钢冷弯机整体示意图;
32、图7为本发明提供的一种隧道型钢拱架切割控制系统的控制系统框图。
- 还没有人留言评论。精彩留言会获得点赞!