一种往复锯的自行走机构及往复锯的制作方法
本技术涉及切割工具,尤其涉及一种往复锯的自行走机构及往复锯。
背景技术:
1、往复锯是以往复运动的锯条进行锯切的工具,电锯属于其中一种,用于锯割金属板材、管材、型材或在钢管上切割斜口,也可切割电缆或其它非金属材料,一般是由机壳、电机、传动机构、锯片等组成,通过传动机构将电机的转矩转化为锯片的直线往复运动,实现切割。
2、然而现有的往复锯存在较大的弊端,首先,往复锯振动较大,使得能量被浪费,且操作人员握持感较差;其次,现有的往复锯无法做到自行走功能,尤其是在切割较大的板材时,在切割过程中需要操作人员实时把持往复锯,操作人员工作强度大,而设置自行走机构需要解决如何保证锯条在工作中以预设角度对待锯物进行切割,以及如何对自行走机构进行设置以便汲取振动产生的能量。因此,亟需一种能够自行走的往复锯,在降低振动的同时,实现自行走功能,提高操作人员的握持感。
技术实现思路
1、为了解决上述问题,本发明的目的在于提供一种往复锯的自行走机构及往复锯。通过设置自行走机构,降低操作人员的工作强度,改善作业环境并提高握持的体验。
2、本发明采用如下技术方案:
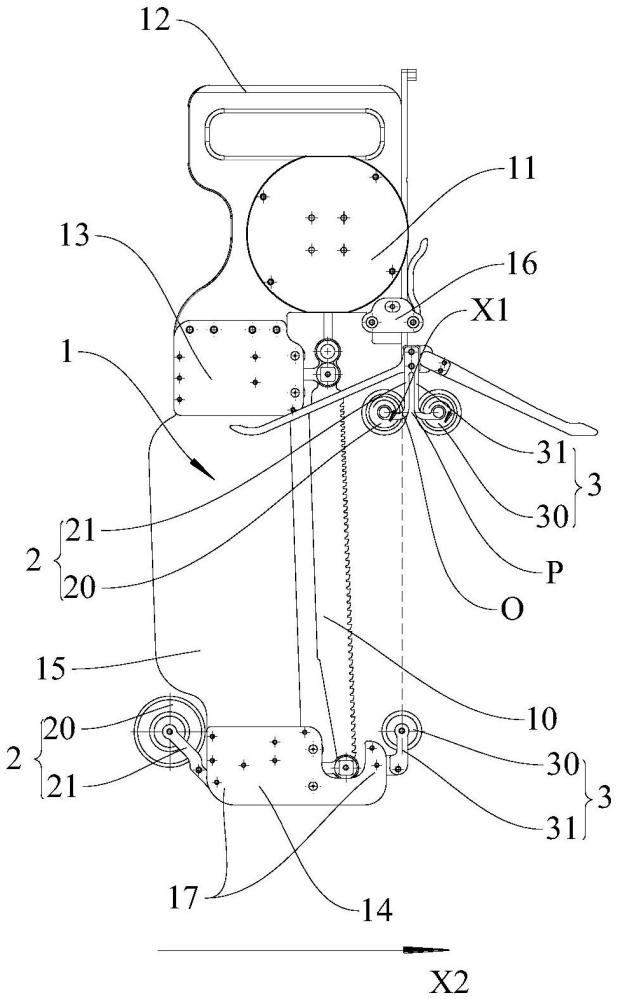
3、一种往复锯的自行走机构,包括:后撑脚,所述后撑脚包括第一单向运动机构以及与所述第一单向运动机构转动连接的第一弹性支撑架,所述第一弹性支撑架连接于往复锯本体上,所述第一弹性支撑架与所述第一单向运动机构的连接点和第一弹性支撑架与所述往复锯本体的连接点之间的连线构成第一力臂;前拉脚,所述前拉脚包括第二单向运动机构以及与所述第二单向运动机构转动连接的第二弹性支撑架,所述第二弹性支撑架连接于所述往复锯本体上,所述第二弹性支撑架与所述第二单向运动机构的连接点和第二弹性支撑架与所述往复锯本体的连接点之间的连线构成第二力臂;所述第一单向运动机构与第二单向运动机构的可转动方向与所述往复锯本体的行走方向适配;所述第一单向运动机构和第二单向运动机构支撑在待锯物的同一表面上,所述第一力臂沿着所述待锯物表面法向向后偏转,所述第二力臂沿着待锯物表面法向向前偏转。
4、进一步的,所述第一弹性支撑架和/或第二弹性支撑架为弹性杆,所述弹性杆的一端与第一单向运动机构和/或第二单向运动机构可转动连接,所述弹性杆的另一端与所述往复锯本体固定连接。
5、进一步的,所述第一弹性支撑架和/或第二弹性支撑架包括连接杆,所述连接杆通过弹性部件安装于所述往复锯本体上。
6、进一步的,所述连接杆的一端与所述第一单向运动机构和/或第二单向运动机构转动连接,所述连接杆的另一端与所述往复锯本体转动连接,所述往复锯本体与连接杆连接处设有弹性部件,弹性部件的一端与所述连接杆抵接,用以对连接杆施加朝向待锯物方向的压力,所述弹性部件的另一端与往复锯本体抵接。
7、进一步的,所述第一单向运动机构和第二单向运动机构包括:单向轴承;弹性衬套,所述弹性衬套套设于所述单向轴承上。
8、本发明还提供了一种往复锯,包括:往复锯本体;自行走机构,所述自行走机构包括两组,分别设置于往复锯本体的上部和下部,两组自行走机构对待锯物进行夹持;所述自行走机构包括:后撑脚,所述后撑脚包括第一单向运动机构以及与所述第一单向运动机构转动连接的第一弹性支撑架,所述第一弹性支撑架连接于所述往复锯本体上,所述第一弹性支撑架与所述第一单向运动机构的连接点和第一弹性支撑架与所述往复锯本体的连接点之间的连线构成第一力臂;前拉脚,所述前拉脚包括第二单向运动机构以及与所述第二单向运动机构转动连接的第二弹性支撑架,所述第二弹性支撑架连接于所述往复锯本体上,所述第二弹性支撑架与所述第二单向运动机构的连接点和第二弹性支撑架与所述往复锯本体的连接点之间的连线构成第二力臂;所述第一单向运动机构与第二单向运动机构的可转动方向与所述往复锯本体的行走方向适配;所述第一单向运动机构和第二单向运动机构支撑在待锯物的同一表面上,所述第一力臂沿着所述待锯物表面法向向后偏转,所述第二力臂沿着所述待锯物表面法向向前偏转。
9、进一步的,所述第一单向运动机构和第二单向运动机构包括:单向轴承;弹性衬套,所述弹性衬套套设于所述单向轴承上。
10、进一步的,位于往复锯本体上部的自行走机构的所述第一弹性支撑架和第二弹性支撑架为弹性杆,所述弹性杆的一端与第一单向运动机构和或第二单向运动机构可转动连接,所述弹性杆的另一端与所述往复锯本体固定连接。
11、进一步的,位于往复锯本体上部和/或下部的自行走机构还包括:位置调整部,所述位置调整部用以调整两组自行走机构之间的距离,所述位置调整部下部连接有后撑脚和前拉脚。
12、进一步的,位于往复锯本体下部的自行走机构的所述第一弹性支撑架和第二弹性支撑架分别包括连接杆,两所述连接杆通过弹性部件安装于所述往复锯本体上。
13、进一步的,两所述连接杆的一端分别与所述第一单向运动机构或第二单向运动机构转动连接,两所述连接杆的另一端与所述往复锯本体转动连接,所述往复锯本体与两所述连接杆连接处均设有弹性部件,所述弹性部件的一端与所述连接杆抵接,用以对连接杆施加朝向待锯物方向的压力,所述弹性部件的另一端与往复锯本体抵接。
14、进一步的,位于所述往复锯本体上部的自行走机构位于锯条前部;位于所述往复锯本体下部的自行走机构,所述前拉脚位于所述锯条前部,所述后撑脚位于所述锯条后部;在工作状态下,位于所述往复锯本体下部的自行走机构的前拉脚的转轴在所述往复锯本体上部的自行走机构前拉脚转轴与后撑脚转轴所组成平面上的投影位于所述往复锯本体上部的自行走机构前拉脚转轴与后撑脚转轴之间。
15、进一步的,位于所述往复锯本体下部的自行走机构的后撑脚的第一单线运动机构轴向中部具有绕着其旋转轴线设置的突出部,所述突出部用以卡接在锯缝中。
16、进一步的,所述自行走机构上还设置有向前延伸和向后延伸的辅助杆;向前延伸的辅助杆为一个,其轴线垂直于第一单向运动机构的转轴;向后延伸的辅助杆为两个,其轴线垂直于第一单向运动机构的转轴,位于锯条两侧;工作时,向前延伸和向后延伸的辅助杆均抵压于所述待锯物表面上。
17、进一步的,所述自行走机构的行进步长大于锯条单次切割深度,且大于第一单向运动机构和第二单向运动机构的最小运动距离。
18、进一步的,所述自行走机构中的行进步长大于锯条单次切割距离且小于三倍的所述单次切割深度。
19、进一步的,位于往复锯本体下部的自行走机构的行进步长大于位于往复锯本体上部的自行走机构行进步长。
20、本发明提供了一种往复锯的自行走机构及往复锯,相较于现有技术,具有以下有益技术效果:一方面实现了往复锯的自行走功能,减轻操作人员工作强度,尤其是针对隔墙板等面积较大物料的切割,切割过程中产生粉尘,通过自行走功能避免操作人员暴露在粉尘环境中;另一方面,针对往复锯存在的振动较大以及振动较大导致加工精度较低的问题,自行走机构利用了往复锯的振动能量,驱动往复锯沿着前进方向行走,减弱了往复锯的振动,提高了加工精度的同时改善了操作人员的握持手感。
- 还没有人留言评论。精彩留言会获得点赞!