一种激光打标定位调测方法、系统及激光打标设备与流程
本发明涉及激光打标,尤其涉及一种激光打标定位调测方法、系统及激光打标设备。
背景技术:
1、激光打标是一种利用激光技术进行标记和刻划的工艺。激光打标利用激光器产生的高能激光束,将光能转化为热能。当激光束照射到物体表面时,局部材料受热膨胀或气化,形成标记。它通过高能激光束对材料表面进行照射,从而产生永久性的标记,不需要接触物体表面,具有高精度、高速度和非接触性的优点。
2、激光打标的工作过程一般为:物料从上料口通过传送设备输送至激光打标位置,而后由激光打标设备对物料的打标区域进行激光打标。但由于物料是通过采用传送履带或传动轮等传送设备进行输送至打标位置,在将物料输送过程中,容易受传送设备本身和物料本身的相互作用力影响,导致物料上打标位置出现偏差,使得同一批次上的物料打标位置不一致,极易影响激光打标效果。
技术实现思路
1、本发明的目的是为了解决现有技术中存在受传送因素影响造成的激光打标位置极易出现偏差的缺点,而提出的一种激光打标定位调测方法、系统及激光打标设备。
2、为了实现上述目的,本发明采用了如下技术方案:
3、本发明第一方面提供了一种激光打标定位调测方法,包括:
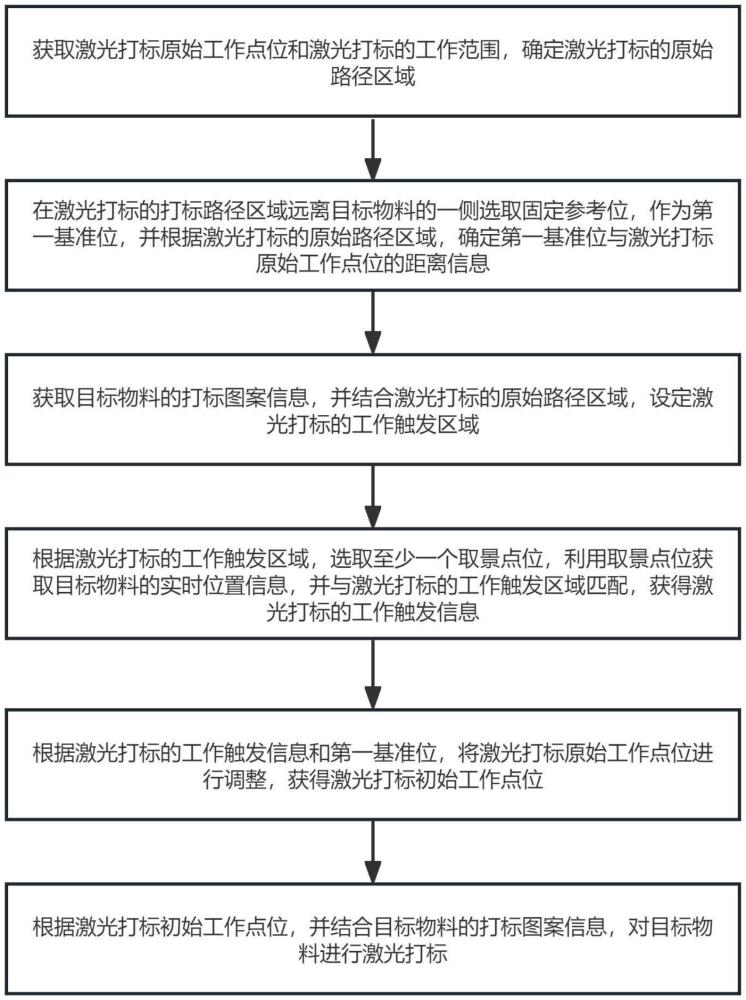
4、获取激光打标原始工作点位和激光打标的工作范围,确定激光打标的原始路径区域;
5、在激光打标的打标路径区域远离目标物料的一侧选取固定参考位,作为第一基准位,并根据激光打标的原始路径区域,确定第一基准位与激光打标原始工作点位的距离信息;
6、获取目标物料的打标图案信息,并结合激光打标的原始路径区域,设定激光打标的工作触发区域;
7、根据激光打标的工作触发区域,选取至少一个取景点位,利用取景点位获取目标物料的实时位置信息,并与激光打标的工作触发区域匹配,获得激光打标的工作触发信息;
8、根据激光打标的工作触发信息和第一基准位,将激光打标原始工作点位进行调整,获得激光打标初始工作点位;
9、根据激光打标初始工作点位,并结合目标物料的打标图案信息,对目标物料进行激光打标。
10、在一些可行的技术方案中,所述取景点位的取景方向垂直于目标物料的输送方向。
11、在一些可行的技术方案中,所述设定激光打标的工作触发区域的方法包括:
12、根据激光打标原始工作点位和激光打标的工作范围,进行以点构线和/或以点构面,确定激光打标的原始路径区域;
13、根据目标物料的打标图案信息,在激光打标的原始路径区域中设定至少一条第二基准位,同时获取第一基准位和第二基准位之间的距离信息;
14、获取目标物料的型号规格,并根据目标物料的打标图案信息,在第一基准位和第二基准位之间设定目标物料的触发距离信息;
15、根据目标物料的触发距离信息,确定激光打标的工作触发区域。
16、在一些可行的技术方案中,所述设定激光打标的工作触发区域的方法还包括:
17、根据目标物料的型号规格和目标物料的打标图案信息,确定目标物料的预打标区域信息;
18、根据目标物料的预打标区域信息,并结合激光打标的工作范围,设定至少一个触发特征信息;
19、根据触发特征信息,在第一基准位和第二基准位之间设定至少一个触发回归位和一个执行打标位;
20、其中,所述触发回归位靠近于第二基准位,所述执行打标位位于触发回归位和第一基准位之间。
21、在一些可行的技术方案中,所述获得激光打标的工作触发信息的方法包括:
22、获取目标物料的输送速度,并利用取景点位实时采集目标物料的第一图像;
23、根据激光打标的原始路径区域,将激光打标的工作触发区域进行平面坐标附加,获得激光打标的工作触发区域的平面坐标分布图;
24、根据激光打标的工作触发区域的平面坐标分布图,并结合第二基准位,获取目标物料的第一图像中经过第二基准位目标物料的预打标区域信息;
25、根据目标物料的第一图像中经过第二基准位目标物料的预打标区域信息,与激光打标的工作触发区域中的触发回归位和/或执行打标位相匹配,确定激光打标的工作触发信息。
26、在一些可行的技术方案中,所述目标物料的预打标区域信息包括:
27、激光打标面积、激光打标边缘位置、激光打标高度中一项或多项组合。
28、在一些可行的技术方案中,所述获得激光打标的工作触发信息的方法还包括:
29、根据激光打标的工作触发区域的平面坐标分布图,并结合激光打标图像信息,对目标物料的第一图像中经过第二基准位目标物料的激光打标面积进行网格式提取,获得第一图像中目标物料的预打标面积信息;
30、和/或根据激光打标的工作触发区域的平面坐标分布图,对目标物料的第一图像中经过第二基准位目标物料的激光打标边缘位置坐标进行提取,获得第一图像中目标物料的激光打标边缘位置坐标信息;
31、和/或根据激光打标的工作触发区域的平面坐标分布图,对目标物料的第一图像中经过第二基准位目标物料的激光打标高度坐标进行提取,获得第一图像中目标物料的激光打标高度坐标信息;
32、分别将第一图像中目标物料的预打标面积信息、第一图像中目标物料的激光打标边缘位置坐标信息、第一图像中目标物料的激光打标高度坐标信息与触发回归位和/或执行打标位进行匹配,确定激光打标的工作触发信息。
33、在一些可行的技术方案中,所述获得第一图像中目标物料的预打标面积信息的方法包括:
34、根据激光打标的工作触发区域的平面坐标分布图,对目标物料的第一图像中经过第二基准位目标物料的激光打标面积进行三角形网格式提取,则:
35、设目标物料的第一图像中经过第二基准位目标物料的激光打标面积中存在n个以任意三点a点(x1,y1)、b点(x2,y2)、c点(x3,y3)组成的三角形网格,则目标物料的第一图像中经过第二基准位目标物料的激光打标面积为:
36、
37、其中,|ab|为a点到b点的直线距离;|ac|为a点到c点的直线距离;|bc|为b点到c点的直线距离。
38、本发明在第二方面提供了一种激光打标定位调测系统,采用第一方面中任一项所述的一种激光打标定位调测方法,所述调测系统还包括:
39、激光打标设备,所述激光打标设备用于对目标物料进行激光打标;
40、传送机构,所述传送机构设置于目标物料上料口与激光打标设备之间,所述传送机构用于将目标物料输送至激光打标设备的打标区域。
41、本发明在第三方面提供了一种激光打标设备,采用了第一方面中任一项所述的一种激光打标定位调测方法或第二方面中所述的一种激光打标定位调测系统,其特征在于,所述打标设备还包括:
42、整形机构,所述整形机构设置于传动机构上,所述整形机构呈一端向另一端逐渐收拢状,所述整形机构的一端位于传动机构的上料口出,所述整形机构的另一端收拢处位于打标区域中,所述整形机构用于将目标物料进行输送至打标区域中。
43、本发明的有益效果为:
44、本发明通过根据激光打标设备的工作范围进行预设激光打标的工作触发区域,并实时采集目标物料在工作触发区域中的位置,来进行判断是否对目标物料进行激光打标工作。即可以对目标物料进行精确位置激光打标,以实现让同一批次的目标物料打标一致。也即有效的实现了解决现有技术中存在受传送因素影响造成的激光打标位置极易出现偏差的缺点。
- 还没有人留言评论。精彩留言会获得点赞!