一种靶片自动化快速更换装置的制作方法
本发明涉及放射医疗,尤其涉及一种靶片自动化快速更换装置。
背景技术:
1、硼中子俘获治疗(boron neutron capture therapy,简称bnct)是一种基于中子俘获反应的放射与药物结合的二元、靶向、细胞级精准放疗模式,它结合了“生物靶向”和“重离子放疗”两者的优势。富集于肿瘤组织内的同位素硼-10俘获热中子时产生的高能α粒子和反冲锂-7核,在肿瘤细胞内部电离辐射,对生物机体及细胞大分子会造成不可修复的dna双链损伤,从而导致肿瘤细胞的凋亡或坏死,同时能够很好地保护周围正常组织。
2、传统光子放疗和质子重离子治疗需要对肿瘤病灶照射多次,高达30多次,而bnct治疗通常只需照射1到2次,治疗疗程明显短于传统光子放疗和质子重离子治疗,bnct的适应症状主要是其他放疗手段不能很好解决的浸润性、多发性、复发性、抗辐射性、无法手术的恶性肿瘤。
3、其中此治疗装置中涉及此专利的核心部件为中子靶站,中子靶站是一个用来产生中子的装置,具体原理是上游束流管中一定能量的质子束轰击中子靶站中的靶体,靶体一般由铜质基座和很薄的镀锂层组成,质子镀锂层发生核反应产生中子,铜质基座内一般设置了水冷微通道,由经过的等离子水带走质子轰击靶体产生的热量。中子靶站可分类为固定靶和旋转靶,固定靶是将单个靶片固定在不运动的靶站机构中,旋转靶是将多个靶片均匀装配到旋转机构上的一个装置。固定靶无需运动,质子束会持续打在靶片上的固定位置,导致靶片的散热问题加剧并且使用寿命较短;旋转靶结构中,靶片采用电机驱动转动,单个靶片不会一直处于工作状态,分散在旋转机构上的靶片会均分间隙工作,在有效提高超热中子束产额的同时,大幅增加了质子轰击面积,降低单个靶片的受热量,从而降低靶片的温升,大幅增加靶片的使用寿命,降低换靶频率,提高中子靶站的可靠性。
4、现有的硼中子俘获治疗肿瘤的装置中,废靶主要有两个产生途径:1、正常工作到效能极限而产生废靶,新靶片经过一段固定时间带电粒子轰击,可供发生核反应的材料会变少,当核反应原材料少到不够产生足够技术参数质量的中子时,靶片就变成了失去其本身性能的废靶片;2、靶片在工作中因个体差异引起靶片上的镀锂层熔化或脱落、辐射损伤、气泡鼓包等异常情况导致质子打靶产生的中子产额大幅降低;这些废靶需要更换成新的靶片,中子治疗肿瘤装置才可以继续使用。废靶片经过长时间的质子辐照使用本身具有很高剂量的感生放射性,若采用人工更换,维护工作人员需要穿上厚重的防辐射服;不仅维护作业笨拙,效率低,而且给作业人员的身体健康带来严重的风险;
5、市面上现有的主要技术方案是把中子靶站整体吊装出设备间,更换上新的中子靶站,此方案存在维护周期长,费用昂贵问题,也不排除有厂商采用人工手动换靶方式。
6、本专利所描述的自动化装置可实现靶片的自动更换,不需要将中子靶站整体吊出,也不需要人员在高剂量辐射环境中工作,就可以很好的解决上述问题。
技术实现思路
1、本发明的目的在于提供一种靶片自动化快速更换装置,解决了现有的靶片的更换是通过把中子靶站整体吊装出设备间,更换上新的中子靶站来实现的,存在维护周期长,费用昂贵的技术问题。
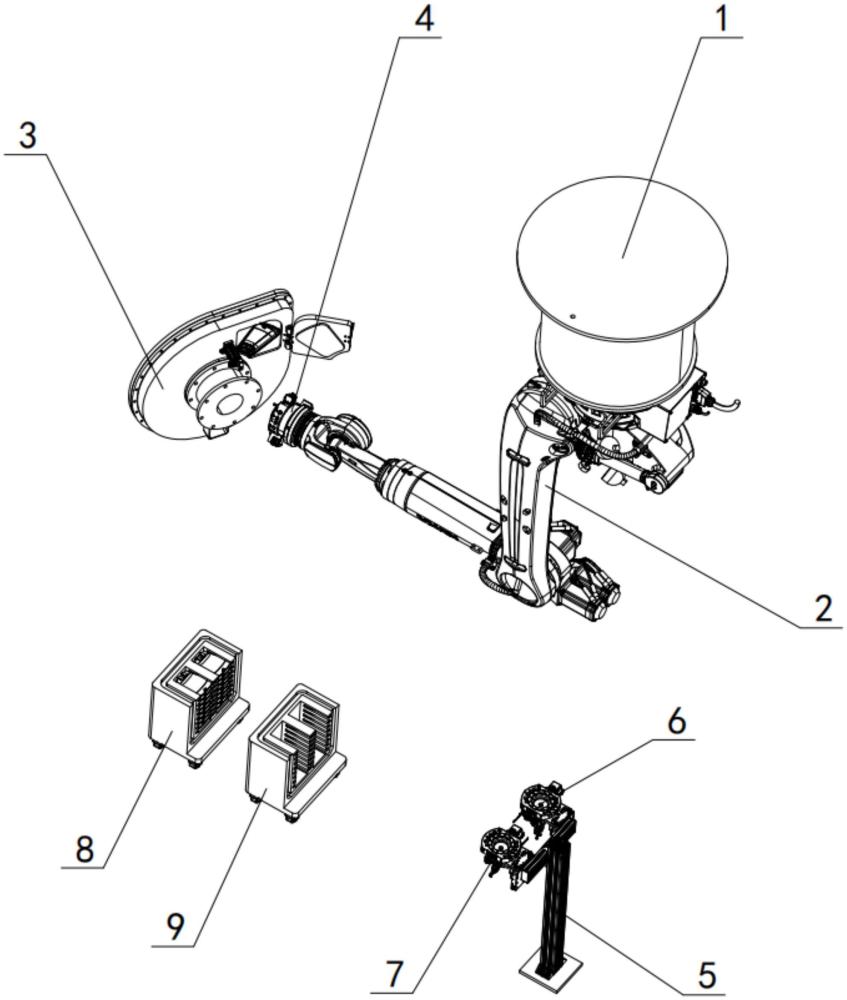
2、为实现上述目的,本发明提供了一种靶片自动化快速更换装置,包括机械手固定基座,还包括六轴工业机器人、旋转中子靶站、夹具锁紧机构机器人侧、夹持工装支撑座、靶站门夹持工装、靶片径向夹持工装和靶片装载盒,所述六轴工业机器人设置在所述机械手固定基座下方,所述旋转中子靶站位于所述六轴工业机器人远离所述机械手固定基座的一侧,所述夹具锁紧机构机器人侧设置在所述六轴工业机器人靠近所述旋转中子靶站的一侧,所述夹持工装支撑座位于所述六轴工业机器人远离所述旋转中子靶站的一侧,所述靶站门夹持工装和所述靶片径向夹持工装分别设置在所述夹持工装支撑座上的左右两侧,所述靶片装载盒位于所述夹持工装支撑座靠近所述机械手固定基座的一侧。
3、其中,所述旋转中子靶站包括靶盘、靶片、靶站端盖、回转式夹紧气缸、夹紧手指、柱塞安装块、气缸转接板、真空腔本体、靶片窗盖、靶片窗开合柄、密封圈、节流阀、磁性接近开关、铰链插销、扭簧和柱塞,所述柱塞安装在所述柱塞安装块上,所述柱塞安装块固定在所述靶盘上,所述节流阀和所述磁性接近开关均安装在所述回转式夹紧气缸上,所述回转式夹紧气缸通过所述气缸转接板安装在所述真空腔本体上,所述密封圈安装在所述真空腔本体上,所述靶片插入到所述靶盘上,所述靶片窗盖与所述真空腔本体上通过所述扭簧和所述铰链插销连接,所述靶片窗开合柄安装在所述靶片窗盖外,所述夹紧手指安装在所述回转式夹紧气缸上,所述靶站端盖安装在所述真空腔本体远离所述所述靶片窗盖的一侧。
4、其中,所述夹具锁紧机构机器人侧包括机器人侧、第一钢珠、导向销、第一电信号接口和第一压缩空气接口,所述第一钢珠呈环形设置在所述机器人侧的内部,所述导向销、所述第一电信号接口和所述第一压缩空气接口均设置在所述机器人侧的外侧。
5、其中,所述夹持工装支撑座包括地板支撑座转接板、型材架、靶站门夹持工装放置位和靶片径向夹持工装放置位,所述型材架设置在所述地板支撑座转接板上,所述靶站门夹持工装放置位和所述靶站径向夹持工装放置位分别设置在所述型材架的左右两侧。
6、其中,所述靶站门夹持工装包括第一夹具锁紧机构工具侧、第一夹具定位结构、第一气缸连接结构、第一磁性接近开关、夹持手指、旋转抓手气缸、第一节流阀、第一直通气管接头、第一电磁阀、弯型气管接头和第一电磁阀线缆,所述第一夹具定位结构、所述第一气缸连接结构均设置在所述第一夹具锁紧机构工具侧下方,所述旋转抓手气缸设置在所述第一气缸连接结构下方,所述第一磁性接近开关设置在所述旋转抓手气缸内,所述夹持手指设置在所述旋转抓手气缸下方,所述第一节流阀设置在所述旋转抓手气缸外,所述第一直通气管接头位于所述第一节流阀的上方,且所述第一直通气管接头与所述弯型气管接头通过所述第一电磁阀连接,所述第一电磁阀线缆设置在所述第一电磁阀外。
7、其中,所述第一夹具锁紧机构工具侧具有锁紧定位面、第二压缩空气接口和第二电信号接口,所述锁紧定位面、所述第二压缩空气接口和所述第二电信号接口均设置在所述第一夹具锁紧机构工具侧远离所述夹持手指的一侧。
8、其中,所述靶片径向夹持工装包括第二夹具锁紧机构工具侧、第二夹具定位结构、第二气缸连接结构、第二磁性接近开关、固定侧靶片夹爪、翼缘侧靶片夹爪、平行抓手气缸、第二节流阀、第二直通气管接头、第二电磁阀和第二电磁阀线缆,所述第二夹具定位结构设置在所述第二夹具锁紧机构工具侧外,所述第二气缸连接结构设置在所述第二夹具定位结构远离所述第二夹具锁紧机构工具侧的一侧,所述第二磁性接近开关位于所述第二气缸连接结构远离所述第二夹具定位结构的一侧,所述固定侧靶片夹爪和所述翼缘侧靶片夹爪分别设置在所述第二气缸连接结构的左右两侧,所述平行抓手气缸设置在所述第二气缸连接结构靠近所述固定侧靶片夹爪的一侧,并位于所述固定侧靶片夹爪和所述翼缘侧靶片夹爪之间,所述第二节流阀设置在所述平行抓手气缸外,所述第二直通气管接头位于所述第二节流阀远离所述平行抓手气缸的一侧,所述第二电磁阀与所述第二直通气管接头连接,所述第二电磁阀线缆设置在所述第二电磁阀远离所述第二直通气管接头的一侧。
9、本发明的一种靶片自动化快速更换装置,通过所述机械手固定基座、所述六轴工业机器人、所述旋转中子靶站、所述夹具锁紧机构机器人侧、所述夹持工装支撑座、所述靶站门夹持工装、所述靶片径向夹持工装和所述靶片装载盒的配合使用,实现靶片的自动换靶功能,在靶片的自动更换过程中,不需要将中子靶站整体吊装出设备间,再更换上新的中子靶站,从而降低了靶片的更换费用,且缩短了维护周期,解决了现有的靶片的更换是通过把中子靶站整体吊装出设备间,更换上新的中子靶站来实现的,存在维护周期长,费用昂贵的技术问题。
- 还没有人留言评论。精彩留言会获得点赞!