硅棒研磨机及硅棒研磨方法与流程
1.本申请涉及硅工件加工技术领域,特别是涉及一种硅棒研磨机及硅棒研磨方法。
背景技术:
2.目前,随着社会对绿色可再生能源利用的重视和开放,光伏太阳能发电领域越来越得到重视和发展。光伏发电领域中,通常的晶体硅太阳能电池是在高质量硅片上制成的,这种硅片从提拉或浇铸的硅锭后通过多线锯切割及后续加工而成。
3.现有硅片的制作流程,以单晶硅产品为例,一般地,大致的作业工序可包括:先使用硅棒截断机对原初的长硅棒进行截断作业以形成多段短硅棒;截断完成后,使用硅棒开方机对截断后的短硅棒进行开方作业后形成单晶硅棒;再对各个硅棒进行磨面、倒角等加工作业,使得硅棒的表面整形达到相应的平整度及尺寸公差要求;后续再对硅棒进行切片作业以得到硅片。
4.一般情况下,在对硅棒进行磨面、倒角的工序中必须经由粗磨与精磨两个过程,装载单根硅棒依次进行粗磨、精磨后将其移送卸载,再对另一硅棒进行装载、研磨与卸载,在通常的大批量加工中硅棒研磨机重复这一加工过程,硅棒研磨机的磨具有大量时间处于空闲状态,研磨效率低下,影响硅棒加工的经济效益。
技术实现要素:
5.鉴于以上所述相关技术的缺点,本申请的目的在于提供一种硅棒切磨一体机及硅棒切磨方法,用于解决现有相关技术中存在的各个工序作业间效率低下及硅棒加工作业效果欠佳等问题。
6.为实现上述目的及其他相关目的,本申请公开一种硅棒研磨机,包括:机座,具有硅棒加工平台;所述硅棒加工平台设有第一加工区位和第二加工区位;第一转移装置,包括可升降的第一硅棒夹具、沿第一方向设置的第一转移导轨、以及用于驱动所述第一硅棒夹具及其夹持的硅棒沿着第一转移路径移动并在第一加工区位和第二加工区位之间转移的第一驱动机构;第二转移装置,包括可升降的第二硅棒夹具、沿第一方向设置的第二转移导轨、以及用于驱动所述第二硅棒夹具及其夹持的硅棒沿着第二转移路径移动并在第一加工区位和第二加工区位之间转移的第二驱动机构;其中,所述第二转移装置及第一转移装置在转移工作状态下,所述第一硅棒夹具夹持的硅棒与第二硅棒夹具夹持的硅棒位于不同高度位置;粗磨装置,设于所述硅棒加工平台的第一加工区位处,用于对位于第一加工区位处的硅棒进行粗磨作业;以及精磨装置,设于所述硅棒加工平台的第二加工区位处,用于对位于第二加工区位处的硅棒进行精磨作业。
7.在本申请的第一方面的某些实施方式中,所述第一转移路径包括升降方向的第一转移段、第一方向的第二转移段,以及升降方向的第三转移段;所述第二转移路径包括第一方向的单向转移段;且所述单向转移段与所述第一方向的第二转移段位于不同高度位置。
8.在本申请的第一方面的某些实施方式中,所述第一转移装置和第二转移装置通过
一安装框架设于所述硅棒加工平台的上方,所述第一转移装置和所述第二转移装置分别设于所述安装框架的相对两旁侧。
9.在本申请的第一方面的某些实施方式中,所述第一硅棒夹具包括:夹臂安装座,设于所述第一转移导轨上;至少两个夹臂,沿第一方向对向设置,用于夹持硅棒的两个端面;以及夹臂驱动机构,用于驱动至少两个夹臂中的至少一个夹臂沿着所述第一方向移动。
10.在本申请的第一方面的某些实施方式中,所述夹臂为旋转式结构;所述第一硅棒夹具还包括夹臂转动机构,用于驱动所述夹臂转动。
11.在本申请的第一方面的某些实施方式中,所述第二硅棒夹具包括:夹臂安装座,设于所述第二转移导轨上;至少一对夹臂,沿第一方向对向设置,用于夹持硅棒的两个端面;以及夹臂驱动机构,用于驱动至少两个夹臂中的至少一个夹臂沿着所述第一方向移动。
12.在本申请的第一方面的某些实施方式中,所述第硅棒夹具夹臂为旋转式结构;所述第二硅棒夹具还包括夹臂转动机构,用于驱动所述夹臂转动。
13.在本申请的第一方面的某些实施方式中,所述第一驱动机构包括:第一移动齿轨,沿第一方向设置;第一驱动齿轮,设于所述第一硅棒夹具且与所述第一移动齿轨啮合;以及第一驱动动力源,用于驱动所述第一驱动齿轮。
14.在本申请的第一方面的某些实施方式中,所述第二驱动机构包括:第二移动齿轨,沿第一方向设置;第二驱动齿轮,设于所述第二硅棒夹具且与所述第二移动齿轨啮合;以及第一驱动动力源,用于驱动所述第二驱动齿轮。
15.在本申请的第一方面的某些实施方式中,所述粗磨装置包括:至少一对粗磨磨具,对向设置于所述硅棒加工平台的第一加工区位处;粗磨磨具进退机构,用于驱动所述至少一对粗磨磨具中的至少一个粗磨磨具沿第二方向作横向移动,其中,所述第二方向垂直于所述第一方向。
16.在本申请的第一方面的某些实施方式中,所述精磨装置包括:至少一对精磨磨具,对向设置于所述硅棒加工平台的第一加工区位处;精磨磨具进退机构,用于驱动所述至少一对精磨磨具中的至少一个精磨磨具沿第二方向作横向移动,其中,所述第二方向垂直于所述第一方向。
17.在本申请的第一方面的某些实施方式中,所述硅棒研磨机还包括:硅棒移送装置,邻设于所述硅棒加工平台的第一加工区位,用于将待加工的硅棒转移至所述硅棒加工平台的第一加工区位或将所述硅棒加工平台上经加工后的硅棒由第一加工区位转移出去。
18.在本申请的第一方面的某些实施方式中,所述硅棒加工平台还设有等待区位,所述硅棒研磨机还包括硅棒移送装置,邻设于所述硅棒加工平台的等待区位,用于将待加工的硅棒转移至所述硅棒加工平台的等待区位或将所述等待区位上的经加工后的硅棒转移出所述硅棒加工平台。
19.本申请的第二方面还提供一种硅棒研磨方法,应用于一硅棒研磨机中,所述硅棒研磨机包括具有硅棒加工平台的机座,所述硅棒加工平台设有第一加工区位和第二加工区位,所述硅棒研磨机还包括第一转移装置、第二转移装置、粗磨装置、以及精磨装置,其中,所述第一转移装置包括第一硅棒夹具、第一转移导轨、以及第一驱动机构,所述第二转移装置包括第二硅棒夹具、第二转移导轨、以及第二驱动机构,其特征在于,所述硅棒研磨方法包括以下步骤:
20.将第一硅棒装载于第一加工工位,令第一转移装置中第一硅棒夹具夹持第一硅棒,令粗磨装置对位于第一加工区位处的第一硅棒进行粗磨作业;
21.令第一转移装置中第一驱动机构驱动第一硅棒夹具及其夹持的第一硅棒沿着第一转移路径移动以及令第二转移装置中第二驱动机构驱动第二硅棒夹具沿着第二转移路径移动,所述第一转移路径与第二转移路径在平行于第一方向的同一直线上但上下错开不在同一水平面上,使得第一硅棒夹具及其夹持的第一硅棒由第一加工区位转移至第二加工区位以及第二硅棒夹具由第二加工区位转移至第一加工区位;
22.令精磨装置对位于第二加工区位处的第一硅棒进行精磨作业;,在此阶段,将第二硅棒装载于第一加工工位,令第二转移装置中第二硅棒夹具夹持第二硅棒,令粗磨装置对位于第一加工区位处的第二硅棒进行粗磨作业;
23.令第一转移装置中第一驱动机构驱动第一硅棒夹具及其夹持的第一硅棒沿着第一转移路径移动以及令第二转移装置中第二驱动机构驱动第二硅棒夹具及其夹持的第二硅棒沿着第二转移路径移动,所述第一转移路径与第二转移路径在平行于第一方向的同一直线上但上下错开不在同一水平面上,使得第一硅棒夹具及其夹持的第一硅棒由第二加工区位转移至第一加工区位以及第二硅棒夹具及其夹持的第二硅棒由第一加工区位转移至第二加工区位;
24.将第一硅棒从第一加工区位卸载并装载第三硅棒,令第一转移装置中第一硅棒夹具夹持第三硅棒,令粗磨装置对位于第一加工区位处的第三硅棒进行粗磨作业;在此阶段,令精磨装置对位于第二加工区位处的第二硅棒进行精磨作业。
25.本申请的第三方面还提供一种硅棒研磨方法,应用于一硅棒研磨机中,所述硅棒研磨机包括具有硅棒加工平台的机座,所述硅棒加工平台设有等待区位、第一加工区位和第二加工区位,所述硅棒研磨机还包括第一转移装置、第二转移装置、粗磨装置、以及精磨装置,其中,所述第一转移装置包括第一硅棒夹具、第一转移导轨、以及第一驱动机构,所述第二转移装置包括第二硅棒夹具、第二转移导轨、以及第二驱动机构,其特征在于,所述硅棒研磨方法包括以下步骤:
26.将第一硅棒装载于等待区位,令第一转移装置中第一硅棒夹具夹持第一硅棒,令第一转移装置中第一驱动机构驱动第一硅棒夹具及其夹持的第一硅棒沿着第一转移导轨移动以由等待区位转移至第一加工区位,令粗磨装置对位于第一加工区位处的第一硅棒进行粗磨作业;
27.令第一转移装置中第一驱动机构驱动第一硅棒夹具及其夹持的第一硅棒沿着第一转移路径移动以及令第二转移装置中第二驱动机构驱动第二硅棒夹具沿着第二转移路径移动,所述第一转移路径与第二转移路径在平行于第一方向的同一直线上但上下错开不在同一水平面上,使得第一硅棒夹具及其夹持的第一硅棒由第一加工区位转移至第二加工区位以及第二硅棒夹具由第二加工区位转移至第一加工区位;
28.令精磨装置对位于第二加工区位处的第一硅棒进行精磨作业;在此阶段,将第二硅棒装载于等待区位,令第二转移装置中第二硅棒夹具夹持第二硅棒,令第二转移装置中第二驱动机构驱动第二硅棒夹具及其夹持的第二硅棒沿着第二转移导轨移动以由等待区位转移至第一加工区位,令粗磨装置对位于第一加工区位处的第二硅棒进行粗磨作业;
29.令第一转移装置中第一驱动机构驱动第一硅棒夹具及其夹持的第一硅棒沿着第
一转移路径移动以及令第二转移装置中第二驱动机构驱动第二硅棒夹具及其夹持的第二硅棒沿着第二转移路径移动,所述第一转移路径与第二转移路径在平行于第一方向的同一直线上但上下错开不在同一水平面上,使得第一硅棒夹具及其夹持的第一硅棒由第二加工区位转移至第一加工区位以及第二硅棒夹具及其夹持的第二硅棒由第一加工区位转移至第二加工区位;
30.将第一硅棒从等待区位卸载并装载第三硅棒,令第一转移装置中第一硅棒夹具夹持第三硅棒,令第一转移装置中第一驱动机构驱动第一硅棒夹具及其夹持的第三硅棒沿着第一转移导轨移动以由等待区位转移至第一加工区位,令粗磨装置对位于第一加工区位处的第三硅棒进行粗磨作业;在此阶段,令精磨装置对位于第二加工区位处的第二硅棒进行精磨作业。
31.如上所述,本申请的硅棒研磨机及硅棒研磨方法,具有以下有益效果:将硅棒研磨机的粗磨装置与精磨装置分别设置在硅棒加工平台的第一加工区位与第二加工区位,并设置有同时贯穿第一加工区位与第二加工区位的第一转移装置与第二转移装置,并为第一、第二转移装置分别配置硅棒夹具与驱动机构,通过协调控制第一、第二转移装置上的第一硅棒夹具与第二硅棒夹具的位置与进行转移时的转移路径,使得在同一时刻所述硅棒研磨机粗磨装置与精磨装置均处于工作状态,在保持硅棒研磨机的尺寸规格与成本的基础上将研磨加工效率提升至两倍,缩减了研磨作业耗时,提升了经济效益。
附图说明
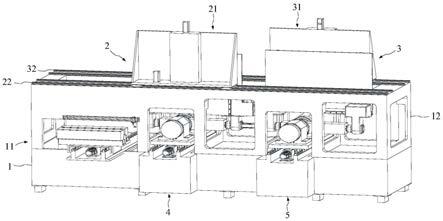
32.图1显示为本申请硅棒研磨机在一实施例中的立体结构示意图。
33.图2显示为本申请硅棒研磨机在一实施例中的简化结构示意图。
34.图3显示为本申请硅棒研磨机中第一硅棒夹具在一实施例中的结构示意图。
35.图4显示为图2中a处的放大结构示意图。
36.图5显示为本申请硅棒研磨机中第二硅棒夹具在一实施例中的结构示意图。
37.图6显示为本申请硅棒研磨机在一实施例中的简化结构示意图。
38.图7显示为本申请的硅棒研磨机在一实施例中硅棒转移的转移路径的简化示意图。
39.图8显示为本申请的硅棒研磨机在一实施例中硅棒转移的转移路径的简化示意图。
40.图9显示为本申请硅棒研磨机在一实施例中的简化结构示意图。
41.图10显示为本申请硅棒研磨机在一实施例中的简化结构示意图。
42.图11显示为本申请的硅棒研磨方法在一实施例中的工作示意图。
43.图12显示为本申请的硅棒研磨方法在一实施例中的工作示意图。
44.图13显示为本申请的硅棒研磨方法在一实施例中的工作示意图。
具体实施方式
45.以下由特定的具体实施例说明本申请的实施方式,熟悉此技术的人士可由本说明书所揭露的内容轻易地了解本申请的其他优点及功效。
46.在下述描述中,参考附图,附图描述了本申请的若干实施例。应当理解,还可使用
其他实施例,并且可以在不背离本公开的精神和范围的情况下进行机械组成、结构、电气以及操作上的改变。下面的详细描述不应该被认为是限制性的,并且本申请的实施例的范围仅由公布的专利的权利要求书所限定。这里使用的术语仅是为了描述特定实施例,而并非旨在限制本申请。空间相关的术语,例如“上”、“下”、“左”、“右”、“下面”、“下方”、“下部”、“上面”、“上方”、“上部”等,可在文中使用以便于说明图中所示的一个元件或特征与另一元件或特征的关系。
47.虽然在一些实例中术语第一、第二等在本文中用来描述各种元件或参数,但是这些元件或参数不应当被这些术语限制。这些术语仅用来将一个或参数件与另一个或参数进行区分。例如,第一方向可以被称作第二方向,并且类似地,第二方向可以被称作第一方向,而不脱离各种所描述的实施例的范围。
48.再者,如同在本文中所使用的,单数形式“一”、“一个”和“该”旨在也包括复数形式,除非上下文中有相反的指示。应当进一步理解,术语“包含”、“包括”表明存在所述的特征、步骤、操作、元件、组件、项目、种类、和/或组,但不排除一个或多个其他特征、步骤、操作、元件、组件、项目、种类、和/或组的存在、出现或添加。此处使用的术语“或”和“和/或”被解释为包括性的,或意味着任一个或任何组合。因此,“a、b或c”或者“a、b和/或c”意味着“以下任一个:a;b;c;a和b;a和c;b和c;a、b和c”。仅当元件、功能、步骤或操作的组合在某些方式下内在地互相排斥时,才会出现该定义的例外。
49.在相关的针对硅棒的加工作业技术中,会涉及到例如开方切割、磨面、倒角等若干道工序。
50.在对硅材料的加工中,通常需经由多道工序处理才可得到投入工业生产的硅片,会涉及到例如开方切割、磨面、倒角等若干道工序。原始的硅材料通常为长硅棒并呈圆柱形结构,由硅棒截断机对长硅棒截断后得到多段短硅棒;再由硅棒开方机对截断后的硅棒截段进行开方形成单晶硅棒,所得单晶硅棒截面呈类矩形(包括类正方形);开方所得的单晶硅棒需要去除表面损伤,并在棱角上进行倒角以消除内应力,继而需要对单晶硅棒进行磨面、倒角,使得硅棒的表面整形达到相应的平整度及尺寸公差要求后续方可进行最终的切片。
51.对单晶硅棒进行研磨的过程中,均需要先进行粗磨再精磨,分别由相应的粗磨磨具与精磨磨具来实现研磨,传统工作方式中对单根单晶硅棒进行粗磨后转运至精磨工作区进行精磨,在精磨完成后将加工后硅棒运送出工作区,在大量的研磨工作中重复操作这一过程,精磨与粗磨的研磨顺序使得硅棒研磨机在作业中不可避免的具有处于等待状态的磨具,例如,在粗磨磨具进行粗磨时精磨磨具处于等待状态,在精磨磨具进行精磨时粗磨磨具处于等待状态,研磨加工过程耗时较长。
52.在本申请提供的实施例中,为明确方向的定义与不同结构之间运作的方式,定义一个由第一方向、第二方向、第三方向定义的三维空间,所述第一方向、第二方向、第三方向均为直线方向且相互两两垂直。将硅棒研磨机的长度延伸方向也即待研磨单晶硅棒放置于其上时的长度方向定义为第一方向也即前后方向,将硅棒研磨机的宽度延伸方向也即左右方向定义为第二方向,将竖直方向也即上、下或升、降方向定义为第三方向。
53.请参阅图1,显示为本申请的硅棒研磨机在一实施例中的结构示意图。如图1所示,所述硅棒研磨机包括机座1,第一转移装置2,第二转移装置3,粗磨装置4,精磨装置5。
54.本申请的硅棒研磨机用于对单晶硅棒进行研磨,所述单晶硅棒由原始硅棒经过硅棒截断,而后经过硅棒开方装置进行开方所得。所述原始硅棒通常为通过用直拉法或悬浮区熔法从熔体中生长出棒状单晶硅。
55.所述机座1具有硅棒加工平台11,硅棒加工平台11设有第一加工区位和第二加工区位。所述硅棒加工平台11设置于机座1上表面,在本实施例一实现方式中,所述加工平台顺应机座1形状设计呈矩形,其第一加工区位与第二加工区位分别对应研磨中的粗磨加工区与精磨加工区,如图1所示,所述第一加工区位与第二加工区位共线的设置在硅棒加工平台11的前后两端,可分别独立的在第一加工区位与第二加工区位上加工所对应承载的单晶硅棒。
56.所述安装框12的支撑结构设置在所述机座1上表面,在图示实施例中,所述机座1上表面呈矩形,所述安装框12的支撑结构在矩形外沿上,所述安装框12上表面与所述机座1上表面形状与大小近似相同。
57.所述安装框12架设在机座1上呈一立式框体结构,框体上表面高于所述硅棒加工平台11并承载所述第一转移装置2与第二转移装置3。如图1所示,所述第一转移装置2与第二转移装置3通过安装框分别设置在所述第一加工区位与第二加工区位上方,所述第一转移装置2与第二转移装置3在第一方向平行、第二方向反向或镜像的相对设置,并且保持所装载的硅棒在水平面上的投影共线。所述第一转移装置2与第二转移装置3通过所述安装框12设置在所述第一加工区位于第二加工区位的上方,并可在两个加工区位之间移动互换至不同加工区位。
58.请参阅图2,显示为本申请的硅棒研磨机在一实施例中的简化结构示意图。请结合参考图1和图2,如图1和图2所示,所述第一转移装置2包括第一硅棒夹具21、第一转移导轨22以及第一驱动机构(图中未予以显示)。所述第一硅棒夹具21承载于所述第一转移导轨22上;所述第一转移导轨22设置在所述安装框12上表面,沿第一方向设置,限制在其上的第一硅棒夹具21沿第一方向运动;所述第一驱动机构用于驱动第一硅棒夹具21及其所夹持的硅棒沿着第一转移导轨22移动,并使得所述第一硅棒夹具21实现在第一加工区位和第二加工区位之间的转移。所述第一硅棒夹具21包括夹臂安装座211、至少两个夹臂212与夹臂驱动机构213。
59.请继续参阅图1,所述第一硅棒夹具21整体上呈现为夹臂安装座设置在上方,夹臂安装座以外部分包括夹臂呈下悬状态,硅棒夹具安装座承载于所述安装框12的上表面,所述夹臂从夹臂安装座处于安装框12的中空部分向下延伸,以实现所述夹臂所夹持的硅棒处于所述硅棒加工平台11的加工面上。
60.所述夹臂安装座设置在第一转移导轨22上,在本实施例的一实现方式中,所述夹臂安装座底部设置有与所述第一转移导轨22相匹配的导槽结构,所述第一转移导轨22沿第一方向布置,所述第一转移导轨22在第一方向的长度范围至少覆盖所述第一工作区与第二工作区在第一方向的位置,以确保所述第一硅棒夹具21所夹持的硅棒在两个工作区之间的移送。在本实施例的一实现方式中,所述第一转移导轨22设置为跨越所述安装框在第一方向的完整长度。
61.请参阅图3,显示为本申请的第一硅棒夹具21在一实施例中的结构示意图,如图3所示,所述夹臂安装座211上还具有第一方向的导轨2111,所述夹臂212通过导轨2111设置
在夹臂安装座211上并可产生在第一方向的移动。
62.所述至少一对夹臂212沿第一方向对向设置,用于夹持硅棒的两个端面。所述硅棒为经过开方的细长型结构,且其长度方向沿第一方向放置,所述端面即为长度方向两端的截面。所述夹臂212从所述夹臂安装座211处下垂,夹臂夹持端位于夹臂212下方用于直接接触夹持硅棒。
63.所述夹臂驱动机构213可驱动所述至少一对夹臂212中的至少一个夹臂沿着所述第一方向移动,以调节所述一对相对设置的夹臂之间的距离。沿第一方向相对设置的两夹臂夹持端相向靠近夹紧硅棒,并保持夹紧状态将硅棒在不同工作区之间移送与研磨,在研磨结束后将硅棒转运至承载位置后相互远离以释放加工后硅棒。
64.在本实施例的某些实现方式中,所述夹臂驱动机构213可以设置为一行进电机,驱动所述夹臂212沿所述夹臂安装座211的导轨移动。
65.在本申请的一实施例中,所述夹臂驱动机构包括驱动电机、驱动齿轮和一对齿条。所述驱动电机带动齿轮旋转,所述一对齿条与所述驱动齿轮的齿轮圆周上的相对的两侧啮合,即两齿条对应的与驱动齿轮啮合的两个啮合处的连线经过所述驱动齿轮的旋转中心。当所述驱动齿轮旋转时,每一齿条在齿轮的带动下运动,每一齿条的运动方向即其对应的啮合处驱动齿轮旋转的方向,由于两齿条分别与所述驱动齿轮圆周上相对的两侧啮合,在驱动齿轮的带动下具有相同大小的线速度,但运动方向相反。在本实施例的一实现方式中,所述一对齿条中的每一齿条均呈细长结构,与驱动齿轮啮合的齿排布在长度方向,所述一对齿条中每一齿条一端与所述驱动齿轮啮合,另一端连接一夹臂,在驱动齿轮的带动下两齿条反向运动,使所述一对夹臂的两夹臂在第一方向沿夹臂安装座导轨相互靠近或相互远离的移动。
66.在本申请的一实施例中,所述夹臂呈旋转式结构,如图3所示,所述第一硅棒夹具还包括夹臂转动机构214,用于驱动所述夹臂转动。在本实施例的一实现方式中,所述一对夹臂212的任一夹持端设置有可转动的结构,在所述夹臂转动机构214的驱动下使得夹臂的夹持端以所述硅棒的长度方向即第一方向为轴线旋转,被夹持硅棒发生相应的以第一方向为轴线的旋转。在实际研磨中,硅棒需进行的磨面与倒角在长度方向的四个面及四个面之间交界的棱边上,由本申请所提供的夹臂,可实现对硅棒不同磨面及不同棱边的选择与控制。
67.在本实施例的某些实施方式中,所述至少一对夹臂的夹持端具有在用于夹持硅棒的接触面。当所述硅棒的夹持端为在细长型结构两端的两个端面时,所述夹臂夹持端的接触面可以设置为在竖直方向的接触面或包括竖直方向的平面的接触面。所述接触面设置在可旋转的平台上,所述平台可设置为自定义的规则几何图形或不规则几何图形。
68.在本申请的一实施例中,所述可旋转的平台可设置为具有锁定功能的铰接装置铰接成的整体,可沿第一方向的轴线旋转。旋转轴的轴线连接于所述夹臂转动机构。
69.在本申请的一实施例中,所述夹臂的夹持端可设置为一可旋转的圆台,所述圆台的圆形平面与硅棒端面接触,在贴紧硅棒端面后保持与硅棒端面相对静止。所述硅棒夹持端还包括锁紧结构,在对某一选定的平面进行磨面时所述夹臂夹持端处于锁紧状态。在不同磨面的切换中,所述硅棒夹持端在夹臂转动机构的带动下沿圆台圆心旋转。
70.请参阅图4,显示为图2的硅棒研磨机在a部分的放大结构示意图。如图4所示,所述
夹臂的夹持端包括可旋转的圆台与设置在圆台上的一系列凸出触点,所述每一触点具有一接触平面。所述圆台在夹臂转动机构的带动下旋转,在本实施例的一实现方式中,所述触点的凸出长度即在第一方向的位置可调节,使得在对夹持硅棒的过程中,对端面平整度较低的硅棒,可根据硅棒端面调整触点的凸出长度,使得每一接触面与硅棒端面处于贴紧状态。所述凸出长度即从圆台的圆平面至触点的接触平面间第一方向的长度。
71.在本申请的一实施例中,所述第一硅棒夹具的夹持端设置有压力传感器,以基于所检测的压力状态调整触点的凸出长度。通常的,在夹持硅棒的过程中,所述第一硅棒夹具的一对夹臂在夹臂驱动机构的驱动下沿第一方向相互靠近,至所述夹持端的接触面与所需夹持的硅棒的端面相互接触,当所述夹持端设置有多个触点并探测到部分触点与所接触硅棒的端面接触的压力值小于一设定值或设定区域时,可通过调整触点的凸出长度(一般为朝向硅棒端面靠近方向)以改变夹紧度;又或者,所述第一硅棒夹具的一对夹臂的每一夹持端均设置为一个接触面,在对硅棒进行夹持的过程中,通过所述夹臂驱动机构驱动一对夹臂朝向硅棒两端的端面相互靠近以实现,在所述夹持端与硅棒端面接触后,由压力传感器检测硅棒的夹紧程度,当达到设定的压力范围时即夹臂驱动机构控制停止所述一对夹臂的相向运动。
72.所述夹臂转动机构可设置在一对夹臂中的一个夹臂上,以带动所述一对夹臂的夹持端与所夹持的硅棒旋转;或者所述夹臂转动机构设置在一对夹臂的每一夹臂上,并协同运动控制所述一对夹臂的两个夹持端发生相同角度与方向的转动。在某些实现方式中,所述夹臂转动机构可设置为一驱动电机。
73.在由所述硅棒研磨机对硅棒的不同侧面进行磨面或对棱边进行倒角时,通过所述夹臂转动机构驱动夹臂夹持端旋转以实现。通常对经过开方的单晶硅棒,在对不同侧面进行研磨时,所述夹臂转动机构控制夹臂夹持端旋转一定角度例如90
°
即可实现,在对不同棱边进行倒角时,可通过控制夹臂夹持端旋转一定角度例如45
°
、135
°
等角度实现。在研磨装置所提供的研磨面为平面的情况下,在进行对硅棒的倒角时,所述夹臂转动机构可控制夹臂夹持端与其所夹持的硅棒旋转不同的角度进行多次倒角实现,例如,对硅棒在完成一个侧面的研磨后,对该侧面相邻的一条棱边与该棱边相对的棱边,可通过旋转一定角度例如40
°
、45
°
、50
°
等角度进行多次倒角,得到在不同侧面交界处过渡更为圆滑的硅棒。所述角度均为从研磨的初始位置起始的旋转角度。所述实现倒角的方式可参考例如cn108942570a等专利公开文献,通过带动硅棒转动一定角度,磨具配合进行在第二方向的横向进给实现对棱角的磨削。
74.所述第一硅棒夹具可例如为升降式硅棒夹具。在一实现方式中,所述第一硅棒夹具的夹臂安装座上设置有一升降方向的导轨,所述硅棒夹具的夹臂与所述夹臂安装座上承载夹臂的导轨可沿着所述升降导轨在第三方向运动,可用于控制硅棒外表面与研磨工具的研磨面在竖直方向的相对位置,以选择硅棒的被研磨面与研磨工具用于进行研磨的研磨区域。在本实施例的一实现方式中,所述升降导轨设置在所述夹臂安装座的直立面上,所述夹臂上对应设置有与所述升降导轨配合的导槽及驱动所述夹臂发生升降运动的驱动机构;所述驱动机构包括行进丝杠与行进电机,所述行进丝杠沿所述升降导轨设置并连接所述行进电机,在行进电机的带动下驱动所述夹臂在第三方向运动。
75.在本申请的一实施例中,所述第一硅棒夹具的升降装置控制所述夹臂在所述第一
转移装置从不同工作区位之间移动例如由第一工作区位至第二工作区位时或如由第二工作区位移动至第一工作区位时,所述第一硅棒夹具的夹臂及其所夹持的硅棒在升降运动驱动机构的带动下沿升降导轨移动,例如为沿着升降导轨上升至一定高度,使得所述第一硅棒夹具的夹臂与所夹持的硅棒整体高度处于所述第二硅棒夹具的夹臂及其所夹持的硅棒的上方。继而,当所述第一硅棒夹具在第一驱动机构的带动下沿第一方向运动,所述第二硅棒夹具在第二驱动机构的带动下沿第一方向运动时,第一硅棒夹具的夹臂及其夹持的硅棒对应的转移路径与第二硅棒夹具的夹臂及其夹持的硅棒对应的转移路径在空间上呈现为沿第一方向的两条平行线,且所述两条平行线分别处于不同的高度,并在水平面上的投影也即在俯视图中共线。
76.请继续参阅图1,所述第一驱动机构包括第一移动齿轨、第一驱动齿轮与第一驱动动力源。所述第一移动齿轨沿第一方向设置,与所述第一转移导轨22平行。所述第一移动齿轨固定在所述安装框的上表面,在第一方向的长度尺度设置为与所述第一转移导轨22近似相同的长度尺度,并与第一转移导轨22平行且相邻设置。
77.所述第一驱动齿轮设置于所述第一硅棒夹具21上,并且与第一移动齿轨啮合,用于带动所述第一硅棒夹具21沿第一转移导轨22的运动。所述第一驱动动力源用于驱动所述第一驱动齿轮。在本申请的一实现方式中,所述第一驱动齿轮设置在所述第一硅棒夹具21的夹臂安装座上,所述第一驱动齿轮由第一驱动动力源带动旋转,所述第一驱动齿轮的轮齿与所述第一移动齿轨啮合,顺应所述第一移动齿轨行进,与第一驱动齿轮连接的第一硅棒夹具21由此在第一转移导轨22上产生相应的移动。
78.在本实施例一实现方式中,所述第一驱动动力源可设置为驱动电机,所述驱动电机的动力输出轴与所述第一驱动齿轮轴接,控制第一驱动齿轮的运动状态,继而第一驱动驱动力源控制所述第一硅棒夹具与其所夹持的硅棒在第一方向的移动。
79.在本申请的一实施例中,所述第一驱动机构可设置在所述第一硅棒夹具上,包括行进电机与行进丝杠,所述行进丝杠沿所述第一转移导轨设置并连接所述行进电机,在行进电机的驱动下传动带动所述第一硅棒夹具沿第一转移导轨移动。
80.请继续参阅图1,所述第二转移装置3包括第二硅棒夹具31、第二转移导轨32以及第二驱动机构。所述第二硅棒夹具31承载于所述第二转移导轨32上;所述第二转移导轨32设置在所述安装框12上表面,沿第一方向设置,限制在其上的第二硅棒夹具31沿第一方向运动;所述第二驱动机构用于驱动第二硅棒夹具31及其所夹持的硅棒沿着第二转移导轨32移动,并使得所述第二硅棒夹具31实现在第一加工区位处和第二加工区位之间的转移。
81.请参阅图5,显示为本申请的硅棒研磨机的第二硅棒夹具31在一实施例中的结构示意图。如图5所示,所述第二硅棒夹具31包括夹臂安装座311、至少两个夹臂312与夹臂驱动机构313。
82.请结合参考图1和图5,所述第二硅棒夹具31整体上呈现为夹臂安装座311设置在上方,夹臂安装座311以外部分包括夹臂312呈下悬状态,夹臂安装座311承载于所述安装框12的上表面,所述夹臂312从夹臂安装座311处于安装框12的中空部分向下延伸,以实现所述夹臂312所夹持的硅棒处于所述硅棒加工平台11的加工面上。
83.所述夹臂安装座311设置在第二转移导轨32上,在本实施例的一实现方式中,所述夹臂安装座311底部设置有与所述第二转移导轨32相匹配的导槽结构,所述第二转移导轨
32沿第一方向布置,所述第二转移导轨32在第一方向的长度范围至少覆盖所述第一工作区与第二工作区在第一方向的位置,以确保所述第二硅棒夹具31所夹持的硅棒在两个工作区之间的移送。在本实施例的一实现方式中,所述第二转移导轨32设置为跨越所述安装框12在第一方向的完整长度。
84.请结合参考图1、图3和图5,如图所示,所述第二转移导轨32与第一转移导轨22之间为平行且对称的设置,所述第一硅棒夹具21的夹臂安装座211与所述第二硅棒夹具31的夹臂安装座311分别在由所述第一转移导轨22与第二转移导轨32所限定的相互平行的路径上移动。当所述第一硅棒夹具21与其所夹持的硅棒从不同加工区位之间转移时,所述第二硅棒夹具31与其所夹持的硅棒也可在不同加工区位之间转移,第一硅棒夹具21的夹臂安装座211与第二硅棒夹具31的夹臂安装座311两者的运动相互独立,限定两转移装置上夹臂安装座的运动范围的第一转移导轨22、第二转移导轨32分别设置于不同的空间位置,互不干扰。
85.在本申请的一实施例中,所述夹臂安装座上还具有第一方向的导轨。请继续参阅图5,所述夹臂312通过一第一方向的水平导轨3111设置在夹臂安装座311上并可产生在第一方向的移动。
86.所述至少一对夹臂312沿第一方向对向设置,用于夹持硅棒的两个端面。所述硅棒为经过开方的细长型结构,且其长度方向沿第一方向放置,所述端面即为长度方向两端的截面。所述夹臂从所述夹臂安装座处下垂,夹臂夹持端位于夹臂下方用于直接接触夹持硅棒。
87.所述夹臂驱动机构313可驱动所述至少一对夹臂312中的至少一个夹臂沿着所述第一方向移动,以调节所述一对相对设置的夹臂之间的距离。沿第一方向相对设置的两夹臂夹持端相向靠近夹紧硅棒,并保持夹紧状态将硅棒在不同工作区之间移送与研磨,在研磨结束后将硅棒转运至承载位置后相互远离以释放加工后硅棒。在本实施例的某些实现方式中,所述夹臂驱动机构314可以设置为一行进电机,驱动所述夹臂312沿所述夹臂安装座311的导轨3111移动。
88.在本申请的一实施例中,所述夹臂驱动机构包括驱动电机、驱动齿轮和一对齿条。所述驱动电机带动驱动齿轮旋转,所述一对齿条与所述驱动齿轮的齿轮圆周上的相对的两侧啮合,即两齿条对应的与驱动齿轮啮合的两个啮合处的连线经过所述驱动齿轮的旋转中心。当所述驱动齿轮旋转时,每一齿条在齿轮的带动下运动,每一齿条的运动方向即其对应的啮合处驱动齿轮旋转的方向,由于两齿条分别与所述驱动齿轮圆周上相对的两侧啮合,在驱动齿轮的带动下具有相同大小的线速度,但运动方向相反。在本实施例的一实现方式中,所述一对齿条中的每一齿条均呈细长结构,与驱动齿轮啮合的齿排布在长度方向,所述一对齿条中每一齿条一端与所述驱动齿轮啮合,另一端连接一夹臂,在驱动齿轮的带动下两齿条反向运动,使所述一对夹臂的两夹臂在第一方向沿夹臂安装座导轨相互靠近或相互远离的移动。
89.在本申请的一实施例中,所述夹臂呈旋转式结构,如图5所示,所述第二硅棒夹具31还包括夹臂转动机构314,用于驱动所述夹臂转动。在本实施例的一实现方式中,所述一对夹臂312的任一夹臂的夹持端设置有可转动的结构,在所述夹臂转动机构314的驱动下使得夹臂夹持端以所述硅棒的长度方向即第一方向为轴线旋转,被夹持硅棒发生相应的以第
一方向为轴线的旋转。在实际研磨中,硅棒需进行的磨面与倒角在长度方向的四个面及四个面之间交界的棱边上,由本申请所提供的夹臂,可实现对硅棒不同磨面及不同棱边的选择与控制。
90.在本实施例的某些实施方式中,所述夹臂夹持端的接触面可以设置为在竖直方向的接触面或包括竖直方向的平面的接触面。所述接触面设置在可旋转的平台上,所述平台可设置为自定义的规则几何图形或不规则几何图形。
91.在本申请的一实施例中,所述可旋转的平台可设置为具有锁定功能的铰接装置铰接成的整体,可沿第一方向的轴线旋转。旋转轴的轴线连接于所述夹臂转动机构。
92.在本申请的一实施例中,所述夹臂的夹持端可设置为一可旋转的圆台,所述圆台的圆形平面与硅棒端面接触,在贴紧硅棒端面后保持与硅棒端面相对静止。所述硅棒夹持端还包括锁紧结构,在对某一选定的平面进行磨面时所述夹臂夹持端处于锁紧状态。在不同磨面的切换中,所述硅棒夹持端在夹臂转动机构的带动下沿圆台圆心旋转。
93.请继续参阅图4,在本申请的一实施例中,所述夹臂的夹持端包括可旋转的圆台与设置在圆台上的一系列凸出触点,所述每一触点具有一接触平面。所述圆台在夹臂转动机构的带动下旋转,在本实施例的一实现方式中,所述触点的凸出长度即在第一方向的位置可调节,使得在对夹持硅棒的过程中,对端面平整度较低的硅棒,可根据硅棒端面调整触点的凸出长度,使得每一接触面与硅棒端面处于贴紧状态。所述凸出长度即从圆台的圆平面至触点的接触平面间第一方向的长度。
94.在本申请的一实施例中,所述硅棒夹具的夹持端设置有压力传感器,以基于所检测的压力状态调整触点的凸出长度。通常的,在夹持硅棒的过程中,所述第一硅棒夹具的一对夹臂在夹臂驱动机构的驱动下沿第一方向相互靠近,至所述夹持端的接触面与所需夹持的硅棒的端面相互接触,当所述夹持端设置有多个触点并探测到部分触点与所接触硅棒的端面接触的压力值小于一设定值或设定区域时,可通过调整触点的凸出长度(一般为朝向硅棒端面靠近的方向)以改变夹紧度;又或者,所述第一硅棒夹具的一对夹臂的每一夹持端均设置为一个接触面,在对硅棒进行夹持的过程中,通过所述夹臂驱动机构驱动一对夹臂朝向硅棒两端的端面相互靠近以实现,在所述夹持端与硅棒端面接触后,由压力传感器检测硅棒的夹紧程度,当达到设定的压力范围时即夹臂驱动机构控制停止所述一对夹臂的相向运动。
95.请继续参阅图5,所述夹臂转动机构314可设置在一对夹臂312中的一个夹臂上,以带动所述一对夹臂的夹持端与所夹持的硅棒旋转。
96.在另一实施例中,所述夹臂转动机构设置在一对夹臂的每一夹臂上,并协同运动控制所述一对夹臂的两个夹持端发生相同角度与方向的转动。在某些实现方式中,所述夹臂转动机构可设置为一驱动电机。
97.在由所述硅棒研磨机对硅棒的不同侧面进行磨面或对棱边进行倒角时,通过所述夹臂转动机构驱动夹臂夹持端旋转以实现。通常对经过开方的单晶硅棒,在对不同侧面进行研磨时,所述夹臂转动机构控制夹臂夹持端旋转一定角度例如90
°
即可实现,在对不同棱边进行倒角时,可通过控制夹臂夹持端旋转一定角度例如45
°
、135
°
等角度实现。在研磨装置所提供的研磨面为平面的情况下,在进行对硅棒的倒角时,所述夹臂转动机构可控制夹臂夹持端与其所夹持的硅棒旋转不同的角度进行多次倒角实现,例如,对硅棒完成一个侧
面的研磨后,对该侧面相邻的一条棱边及与该棱边相对的棱边,可通过旋转一定角度例如40
°
、45
°
、50
°
等角度进行多次倒角,得到在不同侧面交界处过渡更为圆滑的硅棒。所述角度均为从研磨的初始位置起始的旋转角度。所述实现倒角的方式可参考例如cn108942570a等专利公开文献,通过带动硅棒转动一定角度,磨具配合进行在第二方向的横向进给实现对棱角的磨削。
98.在本申请的一实施例中,如图5所示,所述第二硅棒夹具31为升降式硅棒夹具。在一实现方式中,所述第二硅棒夹具31的夹臂安装座311上设置有一第三方向的升降导轨315,所述第二硅棒夹具31的夹臂312与所述夹臂安装座311上承载夹臂312的导轨3111可沿着所述升降导轨315在第三方向运动,可用于控制硅棒外表面与研磨工具的研磨面在竖直方向的相对位置,以选择硅棒的被研磨面与研磨工具用于进行研磨的研磨区域。在本实施例的一实现方式中,所述升降导轨315设置在所述夹臂安装座311的直立面上,所述夹臂312上对应设置有与所述升降导轨315配合的导槽及驱动所述夹臂312发生升降运动的驱动机构;所述驱动机构包括行进丝杠与行进电机,所述行进丝杠沿所述升降导轨设置并连接所述行进电机,在行进电机的带动下驱动所述夹臂在第三方向运动。
99.请继续参阅图1,所述第二驱动机构(图中未予以显示)包括第二移动齿轨、第二驱动齿轮与第二驱动动力源。所述第二移动齿轨沿第一方向设置,与所述第二转移导轨平行。所述第二移动齿轨固定在所述安装框12的上表面,其在第一方向的长度尺度设置为与所述第二转移导轨32近似相同的长度尺度,并与第二转移导轨32平行且相邻设置。
100.所述第二驱动齿轮设置于所述第二硅棒夹具31上,并且与第二移动齿轨啮合,用于带动所述第二硅棒夹具31沿第二转移导轨32的运动。所述第二驱动动力源用于驱动所述第二驱动齿轮。在本申请的一实现方式中,所述第二驱动齿轮设置在所述第二硅棒夹具31的夹臂安装座上,所述第二驱动齿轮由第二驱动动力源带动旋转,所述第二驱动齿轮的轮齿与所述第二移动齿轨啮合,顺应所述第二移动齿轨行进,与第二驱动齿轮连接的第二硅棒夹具31由此在第二转移导轨32上产生相应的移动。
101.在本实施例一实现方式中,所述第二驱动动力源可设置为驱动电机,所述驱动电机的动力输出轴与所述第二驱动齿轮轴接,控制第二驱动齿轮的运动状态,继而第二驱动驱动力源控制所述第一硅棒夹具与其所夹持的硅棒在第一方向的移动。
102.在本申请的一实施例中,所述第二驱动机构可设置在所述第二硅棒夹具上,包括行进电机与行进丝杠,所述行进丝杠沿所述第二转移导轨设置并连接所述行进电机,在行进电机的驱动下传动带动所述第二硅棒夹具沿第二转移导轨移动。
103.在实际设置中,在保持所设计的加工效率的同时,为缩小所述硅棒研磨机的尺寸规格,所述第一硅棒夹具与第二硅棒夹具的夹臂与其所夹持的硅棒在俯视投影图上共线,共线方向即为第一方向。所述第一硅棒夹具升降装置控制所述第一硅棒夹具的夹臂及其所夹持的硅棒上升至一定高度位置,使得所述在俯视投影上共线的第一硅棒夹臂的夹臂及其夹持的硅棒和第二硅棒夹具的夹臂及其夹持的硅棒处于不同的高度位置,满足在转移过程中第一硅棒夹具与所夹持硅棒和第二硅棒夹具与所夹持硅棒之间不发生碰撞,实现两硅棒夹具在不同加工区位之间的安全的转移。
104.请参阅图6,显示为一实施例中本申请的硅棒研磨机的简化结构示意图。请结合参考图1和图6,如图1与图6所示,所述第一转移装置2与第二转移装置3分别架设于所述安装
框12的左右两端,所述第二转移装置3包括第二转移导轨32,所述第二转移导轨32与第一转移导轨31为平行设置。分别承载于第一转移导轨22和第二转移导轨32上的第一硅棒夹具21与第二硅棒夹具31结构相同,分别在对应驱动装置控制下独立工作。其中,当所述第二转移装置及第一转移装置在转移工作状态下,所述第一硅棒夹具夹持的硅棒与第二硅棒夹具夹持的硅棒位于不同高度位置。
105.所述第一硅棒夹具21与第二硅棒夹具31其夹具本身在第二方向为非对称结构,所述第一硅棒夹具21与第二硅棒夹具31在第二反向设置也即镜像设置,所述第一硅棒夹具21与第二硅棒夹具31在夹持状态下或在粗磨磨具41与精磨磨具51同时处于磨削状态时所夹持的硅棒在空间中的同一直线上,且所述同一直线为沿着第一方向的直线。所述第一硅棒夹具21与第二硅棒夹具31可分别沿第一转移导轨22与第二转移导轨32移动,具有在第一方向运动的自由度,所述硅棒夹具均配置有升降导轨,使得被夹持的硅棒可通过第三方向和第一方向的运动交换位置并在移动中处于不同水平面的交错状态。
106.所述第一硅棒夹具21的升降导轨与所述第二硅棒夹具31的升降导轨在第三方向上的移动范围可满足两硅棒夹具的夹臂夹持端与所夹持的硅棒在处于不同的高度区间内。
107.所述第一转移路径即所述第一硅棒夹具21在夹持状态下将所夹持的硅棒从第一加工区位转移至第二加工区位、或者将硅棒从第二加工区位转移至第一加工区位,被夹持的硅棒所经历的转移路径。
108.所述第二转移路径即所述第二硅棒夹具31在夹持状态下将所夹持的硅棒从第一加工区位转移至第二加工区位、或者将硅棒从第二加工区位转移至第一加工区位,被夹持的硅棒所经历的转移路径。
109.请参阅图7和图8,显示为在一实施例中所述第一硅棒夹具夹持的硅棒对应的第一转移路径与第二硅棒夹具夹持的硅棒对应的第二转移路径的简化示意图。如7图所示,所述第一转移路径包括升降方向也即所述第三方向的第一转移段s1、第一方向的第二转移段s2,以及升降方向的第三转移段s3;所述第二转移路径包括第一方向的单向转移段s4。
110.具体地,在所述第一硅棒夹具及其所夹持的硅棒a与第二硅棒夹具及其所夹持的硅棒b的位置在所述第一加工区位和第二加工区位之间切换时,所述第一硅棒夹具所夹持的硅棒a的转移路径可以是:
111.从如图7所示的初始位置开始,所述第一硅棒夹具夹持的硅棒a与第二硅棒夹具夹持的硅棒b分别处于两个加工区位的同一水平面或高度相近的水平面上,第一硅棒夹具的夹臂夹持端与所夹持的硅棒a沿着升降导轨运动至一定高度,即形成所述升降方向的第一转移段s1;
112.而后所述第一硅棒夹具及其夹持的硅棒a整体在第一驱动装置的带动下沿着第一转移导轨在第一方向运动,即形成所述第一方向的第二转移段s2,所述第二转移段的两端端点分别位于第一加工区位和第二加工区位;
113.当所述第一硅棒夹具所夹持的硅棒a沿第一方向转移形所述第二转移段s2的同时,所述第二硅棒夹具及其夹持的硅棒b整体在第二驱动装置的带动下沿第一方向移动,即形成所述第一方向的单向转移段s4,所述单向转移段的两端端点分别位于第一加工区位和第二加工区位,例如当所述第一硅棒夹具从第一加工区位转移至第二加工区位时,所述第二硅棒夹具从第二加工区位转移至第一加工区位;
114.在所述第二硅棒夹具及其夹持的硅棒b离开第二加工区位后所述第一硅棒夹具的夹臂夹持端与所夹持的硅棒在升降装置的控制下下降,即形成所述升降方向的第三转移段s3。
115.请结合参考图7和图8,在如图8所示状态下,所述第一硅棒夹具所夹持的硅棒a与所述第二硅棒夹具夹持的硅棒b分别从初始的加工区位转移到了另一加工区位,即完成了一次转移。
116.如图8所示,根据加工的需要,当所述第一硅棒夹具与其所夹持的硅棒a与第二硅棒夹具与其所夹持的硅棒b需要再次从一加工区位转移至另一加工区位时,可顺应相似的方式进行实现,例如所述第一硅棒夹具夹持的硅棒a在沿升降导轨上升至一定高度形成升降方向的第一转移段s1;继而所述第一硅棒夹具及其所夹持的硅棒a整体沿第一转移导轨移动形成所述第一方向的第二转移段s2,所述第二转移段s2的方向由第一驱动装置进行控制,可从第一加工区位至第二加工区位或从第二加工区位至第一加工区位;在此阶段,所述第二硅棒夹具及其夹持的第二硅棒b在第二驱动装置的驱动下沿第一方向运动,即形成所述第一方向的单向转移段s4;而后所述第一硅棒夹具夹持的硅棒a沿其升降导轨下降,形成所述升降方向的第三转移段s3。
117.完成转移后,所述第一硅棒夹具与第二硅棒夹具与其所夹持的硅棒再次交换了加工区位,在对多根硅棒进行加工的过程中,第一加工区位与第二加工区位的研磨装置可同时进行加工,对加工完成的硅棒卸载后安装新的待研磨硅棒,循环上述硅棒转移的过程。
118.所述第一转移路径中升降方向的第一转移段s1与第三转移段s3高度由所述第一硅棒夹具的升降装置进行调节,在实际作业中,在升降导轨所允许的升降范围内,可根据实现转移的需要控制所述第一转移段s1与第三转移段s3对应的升降高度;所述第二转移路径中第一方向的单向转移段s4与所述第一转移路径中的第一方向的第二转移段位于不同的高度位置,即满足转移中所述第一硅棒夹具夹持硅棒a与所述第二硅棒夹具夹持硅棒b处于不同高度位置,两硅棒上下交错而实现安全转移。
119.在本申请的另一实施例中,所述第一硅棒夹具的夹臂与第二硅棒夹具的夹臂在空间中均可发生第一方向和第三方向的运动。即所述第二硅棒夹具所夹持硅棒对应的第二转移路径也包括在升降方向的转移段,由所述第二硅棒夹具的升降装置进行控制其升降高度。在实际转移中,应当理解,所述第一转移路径与第二转移路径并不是唯一的固定路径,在转移中可避免硅棒研磨机的结构或硅棒等之间发生碰撞,所述第一转移路径与第二转移路径在第一方向的转移段处于满足安全转移的不同高度位置即可。
120.请参阅图9,显示为所述硅棒研磨机在一实施例中简化结构示意图。如图9所示,所述第一转移装置2或/与第二转移装置3处于硅棒转移状态。所述第一硅棒夹具21与第二硅棒夹具31均设置有升降导轨,在由升降导轨限定的可移动范围内,所述第一硅棒夹具21所夹持的硅棒与所述第二硅棒夹具31所夹持的硅棒的高度可调节,所形成的第一转移路径与第二转移路径也不唯一,在实际调节中,可根据满足安全转移的需要使得两硅棒及其夹具在其所占据的高度范围不发生交叠即可。所述硅棒及夹具占据的高度范围即被夹持硅棒的下表面或夹臂夹持端的下表面至承载夹臂的水平导轨的上表面。
121.请继续参阅图2,所述粗磨装置4包括至少一对粗磨磨具41与粗磨磨具进退机构42。
122.所述至少一对粗磨磨具41设置在第一加工区位处,所述一对粗磨磨具41呈现为在第二方向对向设置。在某些实现方式中,所述粗磨磨具41包括砂轮与旋转轴,所述砂轮具有一定颗粒度与粗糙度,相对设置的两砂轮分别提供给被夹持硅棒对称的两个磨面,在某些实施方式中,所述砂轮为圆形并且中间设置有通孔。所述砂轮由磨粒与结合剂固结而成,形成具有磨粒部的表面与待磨削的硅棒表面接触旋转。所述粗磨砂轮具有一定的磨粒尺寸与磨粒密度,同时砂轮中具有气孔。所述砂轮的磨料根据研磨硅棒的需要可设置为三氧化二铝、碳化硅、金刚石、立方氮化硼等硬度大于硅材料硬度的磨粒。
123.所述粗磨磨具进退机构42用于驱动所述至少一对粗磨磨具41中的至少一个粗磨磨具41沿第二方向作横向移动,所述第二方向即垂直于第一方向的所定义的硅棒研磨机的宽度方向。所述粗磨磨具进退机构42控制所述一对粗磨磨具41中的至少一个粗磨磨具在第二方向的位移,以实现调整一对粗磨磨具42中的两个粗磨磨具之间在第二方向的相对距离,进而控制在磨削过程中的进给量也即决定了磨削量。
124.在某些实现方式中,对每一对粗磨磨具配置有粗磨磨具进退机构。在如图2所示的实施例中,所述粗磨磨具进退机构包括一滑动导轨422、驱动电机421、滚珠丝杠(图中未显示)。所述滑动导轨422沿第二方向设置,设于所述机座的第一加工区位上,所述粗磨磨具41的底部设置有与所述滑动导轨422配合的沿第二方向的导槽,所述滚珠丝杠沿所述滑动导轨422设置并与所述驱动电机421轴接。
125.在本申请的一实施例中,所述至少一对粗磨磨具中的一磨具配置有所述驱动电机与滚珠丝杠,通过移动相对设置的一对磨具中的其中一磨具以改变粗磨磨具之间的相对距离。
126.在本申请的一实施例中,所述至少一对粗磨磨具中每一磨具配置有所述驱动电机与滚珠丝杠,所述驱动电机可分别单独的控制所对应的磨具在第二方向的位置,或基于一定的协同关系使得两磨具以相同大小的线速度相互远离或相互靠近,如在磨削过程中所述一对粗磨磨具以在第二方向的相同大小的速度相向进给,一对粗磨磨具砂轮以相同线速度旋转进行磨削。
127.在本申请的一实施例中,一对粗磨磨具由同一驱动电机带动在第二方向以等大反向的速度移动。在本实施例一实现方式中,所述粗磨磨具进退机构包括驱动电机、驱动齿轮、一对齿条、导轨。所述导轨沿第二方向设置,设于所述机座的第一加工区位上,所述粗磨磨具的底部设置有与所述导轨配合的沿第二方向的导槽。所述驱动电机带动齿轮旋转,所述一对齿条与所述驱动齿轮相对的两端啮合,当所述驱动齿轮旋转时所述一对齿条在齿轮两端方向相反的线速度的带动下表现为相互靠近或相互远离。在本实施例一实现方式中,所述一对齿条中每一齿条一端与所述驱动齿轮啮合,另一端分别连接一粗磨磨具,使所述一对粗磨磨具在第而方向沿导轨相互远离或相互靠近。
128.在本申请的一实施例中,所述粗磨装置还包括冷却装置,以对所述至少一对粗磨磨具降温,降低磨削过程中硅棒表面层损伤,提高砂轮的磨削效率与使用寿命。在本实施例的一实现方式中,所述冷却装置包括冷却水管、导流槽和导流孔。在某些实施方式中,所述砂轮圆周外沿设置有用于放置冷却水进入砂轮的旋转驱动电机的防护罩。所述冷却水管一端连接冷却水源,另一端连接至所述砂轮的防护罩表面,所述导流槽设置于防护罩上,作为所述防护罩与冷却水管的接触点,所述导流孔设置在所述冷却槽内。所述冷却装置冷却剂
可为常见的冷却水,冷却水管连接冷却水源,经过冷却水管抽吸的冷却水至砂轮表面的导流槽和导流孔,被引导至直达砂轮和所磨削硅棒的接触面进行冷却,在砂轮的磨削中藉由砂轮旋转导流孔的冷却水由离心作用进入砂轮内部进行充分的冷却。
129.所述至少一对粗磨磨具与所述至少一对夹臂对应,在磨削过程中,由相对的一对夹臂夹持硅棒在第一方向运动,以控制对硅棒的侧面与棱角进行研磨与倒角的顺序,可通过往复运动保证在硅棒长度方向上对其充分研磨,由相对设置的一对粗磨磨具在第二方向运动,以确定磨具与硅棒接触面研磨的进给量。
130.请继续参阅图2,所述精磨装置5包括至少一对精磨磨具51与精磨磨具进退机构52。
131.所述至少一对精磨磨具51设置在第一加工区位处,所述一对精磨磨具51呈现为在第二方向对向设置。在某些实现方式中,所述精磨磨具51包括砂轮与旋转轴,所述砂轮具有一定颗粒度与粗糙度,相对设置的两砂轮分别提供给被夹持硅棒对称的两个磨面,在某些实施方式中,所述砂轮为圆形并且中间设置有通孔。所述砂轮由磨粒与结合剂固结而成,形成具有磨粒部的表面与待磨削的硅棒表面接触旋转。所述精磨砂轮具有一定的磨粒尺寸与磨粒密度,同时砂轮中具有气孔。特别的,所述精磨磨具砂轮的磨粒尺寸小于所述粗磨磨具的砂轮磨粒尺寸,可使硅棒的被研磨面在研磨中形成具有较高表面光洁度的面;或者所述精磨磨具砂轮的磨粒密度大于所述粗磨磨具砂轮的磨粒密度,具有更高的光洁度。
132.所述砂轮的磨料根据研磨硅棒的需要可设置为三氧化二铝、碳化硅、金刚石、立方氮化硼等硬度大于硅材料硬度的磨粒。
133.所述精磨磨具进退机构52用于驱动所述至少一对精磨磨具51中的至少一个精磨磨具沿第二方向作横向移动,所述第二方向即垂直于第一方向的所定义的硅棒研磨机的宽度方向。所述精磨磨具进退机构52控制所述一对精磨磨具51中的至少一个精磨磨具在第二方向的移动,以实现控制所述一对精磨磨具51的两个磨具之间在第二方向的相对距离,进而控制在磨削过程中的进给量也即决定了磨削量。
134.在某些实现方式中,对每一对粗磨磨具配置有粗磨磨具进退机构。在如图2所示的实施例中,所述精磨磨具进退机构包括一滑动导轨522、驱动电机521、滚珠丝杠。所述滑动导轨522沿第二方向设置,设于所述机座的第一加工区位上,所述精磨磨具51的底部设置有与所述滑动导轨522配合的沿第二方向的导槽,所述滚珠丝杠沿所述滑动导轨522设置并与所述驱动电机521轴接。
135.在本申请的一实施例中,所述至少一对精磨磨具中的一磨具配置有所述驱动电机与滚珠丝杠,通过移动相对设置的一对磨具中的其中一磨具以改变精磨磨具之间的相对距离。
136.在本申请的一实施例中,所述至少一对精磨磨具中每一磨具配置有所述驱动电机与滚珠丝杠,所述驱动电机可分别单独的控制所对应的磨具在第二方向的位置,或基于一定的协同关系使得两磨具以相同大小的线速度相互远离或相互靠近,如在磨削过程中所述一对精磨磨具以在第二方向的相同大小的速度相向进给,一对精磨磨具砂轮以相同线速度旋转进行磨削。
137.在本申请的一实施例中,一对精磨磨具由同一驱动电机带动在第二方向以等大反向的速度移动。在本实施例一实现方式中,所述精磨磨具进退机构包括驱动电机、驱动齿
轮、一对齿条、导轨。所述导轨沿第二方向设置,设于所述机座的第一加工区位上,所述精磨磨具的底部设置有与所述导轨配合的沿第二方向的导槽。所述驱动电机带动齿轮旋转,所述一对齿条与所述驱动齿轮相对的两端啮合,当所述驱动齿轮旋转时所述一对齿条在齿轮两端方向相反的线速度的带动下表现为相互靠近或相互远离。在本实施例一实现方式中,所述一对齿条中每一齿条一端与所述驱动齿轮啮合,另一端分别连接一精磨磨具,使所述一对精磨磨具在第而方向沿导轨相互远离或相互靠近。
138.在本申请的一实施例中,所述精磨装置还包括冷却装置,以对所述至少一对精磨磨具降温,降低磨削过程中硅棒表面层损伤,提高砂轮的磨削效率与使用寿命。在本实施例的一实现方式中,所述冷却装置包括冷却水管、导流槽和导流孔。在某些实施方式中,所述砂轮圆周外沿设置有用于放置冷却水进入砂轮的旋转驱动电机的防护罩。所述冷却水管一端连接冷却水源,另一端连接至所述砂轮的防护罩表面,所述导流槽设置于防护罩上,作为所述防护罩与冷却水管的接触点,所述导流孔设置在所述冷却槽内。所述冷却装置冷却剂可为常见的冷却水,冷却水管连接冷却水源,经过冷却水管抽吸的冷却水至砂轮表面的导流槽和导流孔,被引导至直达砂轮和所磨削硅棒的接触面进行冷却,在砂轮的磨削中藉由砂轮旋转导流孔的冷却水由离心作用进入砂轮内部进行充分的冷却。
139.所述至少一对精磨磨具与所述至少一对夹臂对应,在磨削过程中,由相对设置的一对夹臂夹持硅棒在第一方向运动,以控制对硅棒的侧面与棱角进行研磨与倒角的顺序,可通过往复运动保证在硅棒长度方向上对其充分研磨,由相对设置的一对精磨磨具在第二方向运动,以确定磨具与硅棒接触面研磨的进给量。
140.由本申请所提供的硅棒研磨机,在实际研磨中,所述第一加工区位与第二加工区位可同时处于工作状态,可对不同硅棒分别进行粗磨与精磨。在一实施例中,将一待研磨的单晶硅棒移送至第一加工区位,在所述第一硅棒夹具的夹持下由粗磨装置对硅棒进行研磨,在粗磨研磨结束后,第一硅棒夹具的夹具在升降装置驱动下使得夹臂与所夹持的硅棒上升到一定高度,而后由第一驱动装置驱动第一硅棒夹具及其所夹持的硅棒沿第一转移导轨移动,使第一硅棒夹具与所夹持的硅棒从第一加工区位转移至第二加工区位。在第二加工区位处所述第一硅棒夹具的夹臂沿其升降导轨下降,以实现精磨装置与所夹持的硅棒的研磨;在第一硅棒夹具所夹持的硅棒进行精磨的同时,由第二硅棒夹具夹持一硅棒在第一加工区位对其进行粗磨,在粗磨完成时前述第二加工区位的硅棒精磨完成;由第二转移装置将粗磨完成的硅棒转移到第二加工区位进行精磨,第一转移装置夹持的硅棒精磨完成移送出所述硅棒加工平台,在转移过程中,第一硅棒夹具与第二硅棒夹具的升降装置分别调整夹臂与所夹持硅棒的高度,使得在转移过程中第一转移路径与第二转移路径及转移路径上的硅棒与夹持结构相互交错;而后第一转移装置继而继续夹持未经过研磨的硅棒,即重复上述过程。
141.在本申请的某些实施例中,所述第一硅棒夹具与第二硅棒夹具包括有多对在第一方向相对设置的夹臂,在所述粗磨装置与精磨装置处分别设置有多对相对设置的粗磨磨具与精磨磨具。在某些实现方式中,所述第一硅棒夹具、第二硅棒夹具、粗磨装置与精磨装置上夹臂对数与磨具对数相同,每一对夹臂与每一对磨具的驱动机构相对独立,可在同一时间相对独立的进行多根硅棒在第一加工区位与第二加工区位之间的转移与研磨。
142.在本申请的一些实施例中,所述硅棒研磨机还包括硅棒移送装置。所述硅棒移送
装置用于将待加工的硅棒转移至第一加工区位或将研磨完成后的硅棒转移出所述硅棒加工平台。
143.请参阅图10,显示为本申请的硅棒研磨机在一实施例中的简化结构示意图。如图10所示,所述硅棒移送装置6邻设于所述硅棒加工平台11的第一加工区位,并贯穿于所述第一转移装置2与第二转移装置3。在本申请的一实施例中,所述硅棒移送装置6可设置为传送带机构,其传送方向沿第二方向,将位于转移装置上的硅棒运送至所述第一加工区位。所述传送带两端端点可设置在所述机座的左右两侧,传送距离覆盖所述硅棒研磨机的宽度,根据加工需要可将硅棒从上料位置转移至第一加工区位处的第一转移导轨或第二转移导轨,或将第一加工区位或第二加工区位的硅棒转移出硅棒加工平台至下料位置。所述上料位置与下料位置可为同一位置,设于硅棒转移装置的同一端;或可分别设置在硅棒转移装置的在第二方向的两端也即左右两端。
144.在本申请的某些实现方式中,所述硅棒移送装置6还可设置为链条输送机构、倍速链机构,以实现在第二方向将硅棒在不同加工区位与上料位置或下料位置之间转移。
145.在本申请的某些实施例中,所述硅棒加工平台11还设有等待区位(图中未予以显示),所述硅棒研磨机还包括硅棒移送装置6。所述等待区位设置于所述机座在第二方向的旁侧,可作为待加工硅棒的上料位置与加工完成后的硅棒的下料位置。
146.所述硅棒移送装置6邻设于所述硅棒加工平台11的等待区位,用于将待加工的硅棒转移至所述硅棒加工平台11的等待区位或将所述等待区位上的经加工后的硅棒转移出所述硅棒加工平台11。在一实现方式中,所述硅棒移送装置6可设置为传送带机构,其传送方向沿第二方向,将位于转移装置上的硅棒运送至所述第一加工区位。所述传送带两端端点可设置在所述机座的左右两侧,传送距离覆盖所述硅棒研磨机的宽度,根据加工需要可将硅棒从上料位置转移至第一加工区位处的第一转移导轨或第二转移导轨,或将第一加工区位或第二加工区位的硅棒转移出硅棒加工平台11至下料位置。所述上料位置与下料位置可为同一位置,设于硅棒转移装置的同一端;或可分别设置在硅棒转移装置的在第二方向的两端也即左右两端。
147.在本申请的某些实现方式中,所述硅棒移送装置还可设置为链条输送机构、倍速链机构,以实现在第二方向将硅棒在不同加工区位与上料位置或下料位置之间转移。
148.通过本申请提供的硅棒研磨机,在对硅棒进行研磨加工中,所述第一工作区位与第二工作区位的粗磨装置与精磨装置可分别对处于不同研磨阶段的硅棒进行研磨,在保持硅棒研磨机的尺寸规格与成本的基础上将研磨加工效率提升至两倍,缩减了硅棒加工的耗时,提升了经济效益。
149.为实现本申请提供的硅棒研磨机的使用,本申请在第二方面还提供了一种硅棒研磨方法,所述硅棒研磨方法可用于一硅棒研磨机中。所述硅棒研磨机包括具有硅棒加工平台的机座,所述硅棒加工平台设有第一加工区位和第二加工区位;所述硅棒研磨机还包括第一转移装置、第二转移装置、粗磨装置、以及精磨装置,其中,所述第一转移装置包括可升降的第一硅棒夹具、第一转移导轨、以及第一驱动机构,所述第二转移装置包括可升降的第二硅棒夹具、第二转移导轨、以及第二驱动机构。
150.所述精磨装置与粗磨装置分别位于不同的加工区位;在本申请提供的实施例中,所述粗磨装置与精磨装置分别对应设置于第一加工区位与第二加工区位。所述精磨装置包
括至少一对精磨磨具,可对硅棒相对的两侧同时进行研磨;所述粗磨装置包括至少一对粗磨磨具,可对硅棒相对的两侧同时进行研磨。在某些实现方式中,所述粗磨装置的一对磨具中至少一个磨具具有在第二方向运动的自由度,所述粗磨装置的一对磨具中至少一个磨具具有在第二方向运动的自由度,在粗磨作业与精磨作业的磨削过程中可控制对硅棒的磨削量。
151.所述第一驱动机构驱动第一硅棒夹具沿第一转移导轨移动;所述第二驱动机构驱动第二硅棒夹具沿第二转移导轨移动。所述第一转移导轨与第一转移导轨平行设置于所述机座上,均沿第一方向布置。
152.所述第一方向与第二方向相互垂直,在本申请提供的实施例中,所述第一方向即沿着所述机座的长度方向,所述第二方向为机座的宽度方向。
153.在某些实施例中,所述硅棒研磨方法可应用的硅棒研磨机包括如图1至图10所示的实施例中的任一实施例的硅棒研磨机。
154.所述硅棒研磨方法包括以下步骤:
155.请参阅图11,显示为执行本申请的硅棒研磨方法的硅棒研磨机在一实施例中的简化结构示意图。在如图11所示状态下,所述第一硅棒71装载于第一加工工位,令第一转移装置中的第一硅棒夹具21夹持第一硅棒71,令粗磨装置4对位于第一加工区位处的第一硅棒71进行粗磨作业。在某些实现方式中,所述第一硅棒71在第一硅棒夹具21的夹持下沿第一方向移动,在粗磨过程及后续精磨过程中,由第一硅棒夹具21带动所述第一硅棒71运动,使得所述第一硅棒71与磨具的接触面从硅棒的一端运动至另一端,即完成对相对的两个侧面的研磨;或者,所述第一硅棒夹具21带动第一硅棒71在第一方向迂回运动,使所述第一硅棒71与粗磨磨具的接触面在运动中充分覆盖第一硅棒71的侧面。所述第一硅棒夹具21包括至少一对夹臂,所述夹臂为可旋转式,在所述夹臂的夹持下所述第一硅棒71可沿第一方向的轴心线旋转,即实现对所述第一硅棒71不同侧面研磨的切换与倒角。
156.请参阅图12,显示为执行本申请的硅棒研磨方法的硅棒研磨机在一实施例中的简化结构示意图。在如图12所示状态下,在对所述第一硅棒71在第一加工区位的粗磨完成后,令所述第一转移装置中的第一驱动机构驱动第一硅棒夹具21及其所夹持的第一硅棒71沿第一转移导轨移动,以将所述第一硅棒71由第一加工区位转移至第二加工区位,令精磨装置5对第一硅棒71进行精磨作业;在此阶段,令第二转移装置中第二驱动机构去带动第二硅棒夹具沿第二转移路径移动,以使得第二硅棒夹具从第二加工区转移至第一加工区位;将所述第二硅棒72装载于第一加工区位,令所述第二转移装置中的第二硅棒夹具31夹持第二硅棒72,令粗磨装置4对位于第一加工区位的第二硅棒72进行粗磨作业。在进行转移的过程中,由所述第一硅棒夹具21的升降装置控制其夹臂与所夹持的第一硅棒71上升至一定高度,使得第一硅棒71与第一硅棒夹具21的夹臂与所述第二硅棒夹具31的夹臂及其夹持的第二硅棒处于不同的水平面上,再由第一驱动装置驱动所述第一硅棒夹具21进行第一方向的移动以从第一加工区位至第二加工区位。
157.在某些实现方式中,所述第二硅棒72在第二硅棒夹具31的夹持下沿第一方向移动,在粗磨过程及后续的精磨过程中,第二硅棒夹具31带动所述第二硅棒72运动,使得所述第二硅棒72与磨具的接触面从硅棒的一端运动至另一端,即完成对相对的两个侧面的研磨;或者,所述第二硅棒夹具31带动第二硅棒72在第一方向迂回运动,使所述第二硅棒72与
磨具的接触面在运动中充分覆盖第一硅棒71的侧面。所述第二硅棒夹具31包括至少一对夹臂,所述夹臂为可旋转式,在所述夹臂的夹持下所述第二硅棒72可沿第一方向的轴心线旋转,即实现对所夹持的第二硅棒72的不同侧面的研磨切换与倒角。
158.请参阅图13,显示为执行本申请的硅棒研磨方法的硅棒研磨机在一实施例中的简化结构示意图。当位于第二加工区位的第一硅棒71精磨作业完成时,位于第一加工区位的所述第二硅棒72粗磨作业完成。如图13所示,令第一转移装置中的第一驱动机构驱动第一硅棒夹具21及其夹持的第一硅棒71沿着第一转移导轨移动,以将所述第一硅棒71由第二加工区位转移至第一加工区位,继而将第一硅棒71从第一加工区位卸载并装载第三硅棒,令第一转移装置中的第一硅棒夹具21夹持第三硅棒,令粗磨装置4对位于第一加工区位处的第三硅棒进行粗磨作业;在此阶段,令第二转移装置中的第二驱动机构驱动第二硅棒夹具31及其夹持的第二硅棒72沿着第二转移导轨移动,以将所述第二硅棒72由第一加工区位转移至第二加工区位,令精磨装置5对位于第二加工区位处的第二硅棒72进行精磨作业。在将所述第一硅棒71从第二加工区位转移至第一加工区位,同时将所述第二硅棒72从第一加工区位转移至第二加工区位的过程中,所述第一硅棒夹具21与第二硅棒夹具31及其分别夹持的第一硅棒与第二硅棒的位移均包括沿着第一方向移动,令第一转移装置中第一驱动机构驱动第一硅棒夹具21及其夹持的第一硅棒71沿着第一转移路径移动以及令第二转移装置中第二驱动机构驱动第二硅棒夹具31及其夹持的第二硅棒72沿着第二转移路径移动。由第一硅棒夹具21的升降装置控制其夹臂与第一硅棒71所处水平面的高度,第二硅棒夹具31的升降装置控制其夹臂与所夹持的第二硅棒72所处水平面的高度,在移动中使得所述第一转移路径与第二转移路径处于不同高度的水平面上,即在空间中处于在第三方向上交错的状态,即可避免两硅棒夹具在沿第一方向的移动中路径交叠而发生碰撞。
159.当位于第二加工区位的所述第二硅棒72精磨作业完成时,位于所述第一加工区位的第三硅棒完成粗磨作业。所述第二转移装置的第二驱动机构驱动所述第二硅棒夹具31及其所夹持的第二硅棒72沿第二转移导轨从第二加工区位转移至第一加工区位,并同时由升降装置调整其对应的第二转移路径高度,即可对研磨完成的第二硅棒72卸载并装载新的待研磨硅棒。
160.由本申请提供的硅棒研磨方法,即实现在同一时刻在同一硅棒研磨设备上对不同的硅棒分别进行粗磨和精磨,削减了研磨的等待时间,对上述研磨步骤进行重复,即实现对大量硅棒的研磨与流转。
161.本申请的第三方面还提供了一种硅棒研磨方法,可用于一硅棒研磨机中。
162.所述硅棒研磨机包括具有硅棒加工平台的机座,所述硅棒加工平台设有第一加工区位、第二加工区位和等待区位;所述硅棒研磨机还包括第一转移装置、第二转移装置、粗磨装置、以及精磨装置;其中,所述第一转移装置包括第一硅棒夹具、第一转移导轨、以及第一驱动机构,所述第二转移装置包括第二硅棒夹具、第二转移导轨、以及第二驱动机构。
163.所述等待区位邻设于第一加工区位,用于装载需转移进入加工区位的待研磨硅棒或用于卸载研磨结束的硅棒。
164.所述精磨装置与粗磨装置分别位于不同的加工区位;在本申请提供的实施例中,所述粗磨装置与精磨装置分别对应第一加工区位与第二加工区位。
165.所述精磨装置包括至少一对精磨磨具,可同时对硅棒相对的两侧进行研磨;所述
粗磨装置包括至少一对粗磨磨具,可同时对硅棒相对的两侧进行研磨。在某些实现方式中,所述粗磨装置与精磨装置的磨具均具有在第二方向运动的自由度,对第一加工区位上的被夹持的硅棒,所述粗磨装置的一对粗磨磨具中至少一个粗磨磨具可沿第二方向移动以在粗磨作业中控制对所研磨的硅棒的磨削量;对第二加工区位上的被夹持的硅棒,所述精磨装置的一对精磨磨具中至少一个精磨磨具可沿第二方向移动以在精磨作业中控制对所研磨的硅棒的磨削量。
166.所述第一驱动机构驱动第一硅棒夹具沿第一转移导轨移动;所述第二驱动机构驱动第二硅棒夹具沿第二转移导轨移动。所述第一转移导轨与第一转移导轨平行设置于所述机座上,均沿第一方向布置。
167.所述第一方向与第二方向相互垂直,在本申请提供的实施例中,所述第一方向即沿着所述机座的长度方向,所述第二方向为机座的宽度方向。
168.在某些实施例中,所述硅棒研磨方法可应用的硅棒研磨机包括如图1至图10所示的实施例中的任一实施例的硅棒研磨机。
169.所述硅棒研磨方法包括以下步骤:
170.将第一硅棒装载于所述等待区位,令第一转移装置中的第一硅棒夹具夹持第一硅棒,令第一转移装置中第一驱动机构驱动第一硅棒夹具及其夹持的第一硅棒沿着第一转移导轨移动,以将所述第一硅棒由等待区位转移至第一加工区位。在如图11所示状态下,所述第一硅棒71被转移至第一加工区位,令粗磨装置4对位于第一加工区位处的第一硅棒71进行粗磨作业;在此阶段,所述第二硅棒72装载于等待区位,令所述第二转移装置中的第二硅棒夹具31夹持第二硅棒72。
171.在某些实现方式中,所述第一硅棒71在第一硅棒夹具21的夹持下沿第一方向移动,在粗磨过程及后续的精磨过程中,由第一硅棒夹具21带动所述第一硅棒71从一端运动至另一端完成对相对的两个侧面的研磨;或者,所述第一硅棒夹具21带动第一硅棒71在第一方向迂回运动,使所述第一硅棒71与粗磨磨具的接触面在运动中充分覆盖第一硅棒71的侧面。所述第一硅棒夹具21包括至少一对夹臂,所述夹臂为可旋转式,在所述夹臂的夹持下所述第一硅棒71可沿第一方向的轴心线旋转,即实现对所述第一硅棒71不同侧面研磨的切换与倒角。
172.在对所述第一硅棒71在第一加工区位的粗磨完成后,令所述第一转移装置中的第一驱动机构驱动第一硅棒夹具21及其所夹持的第一硅棒71沿第一转移导轨移动,以将所述第一硅棒71顺应第一转移路径由第一加工区位转移至第二加工区位,令精磨装置5对第一硅棒71进行精磨作业;在此阶段,令第二转移装置中第二驱动机构去带动第二硅棒夹具31沿第二转移路径移动,以使得第二硅棒夹具31从第二加工区转移至所述等待区位;再令第二转移装置中第二驱动机构驱动第二硅棒夹具31及其夹持的第二硅棒72沿着第二转移导轨移动,以将所述第二硅棒72由等待区位转移至第一加工区位,令粗磨装置4对位于第一加工区位处的第二硅棒72进行粗磨作业。在如图12所示状态下,所述第一硅棒71被转移至第二加工区位,由精磨磨具对其进行研磨作业;所述第二硅棒72被转移至第一加工区位,由粗磨磨具对其进行研磨作业。由第一硅棒夹具21的升降装置控制其夹臂与第一硅棒71所处水平面的高度,第二硅棒夹具31的升降装置控制其夹臂所处水平面的高度,在移动中使得所述第一转移路径与第二转移路径处于不同高度的水平面上,即在空间中处于在第三方向上
交错的状态。
173.在将所述第一硅棒71从第二加工区位转移至第一加工区位,同时将所述第二硅棒72从第一加工区位转移至第二加工区位的过程中,所述第一硅棒夹具21与第二硅棒夹具31及其分别夹持的第一硅棒71与第二硅棒72均沿第一方向移动,令第一转移装置中第一驱动机构驱动第一硅棒夹具21及其夹持的第一硅棒71沿着第一转移路径移动以及令第二转移装置中第二驱动机构驱动第二硅棒夹具31及其夹持的第二硅棒72沿着第二转移路径移动。由第一硅棒夹具21的升降装置控制其夹臂与第一硅棒71所处水平面的高度,第二硅棒夹具31的升降装置控制其夹臂与所夹持的第二硅棒72所处水平面的高度,在移动中使得所述第一转移路径与第二转移路径处于不同高度的水平面上,即在空间中处于在第三方向上交错的状态,即可避免两硅棒夹具在沿第一方向的移动中路径交叠而发生碰撞。
174.在某些实现方式中,所述第二硅棒72在第二硅棒夹具31的夹持下沿第一方向移动,在粗磨过程及后续的精磨过程中,第二硅棒夹具31带动所述第二硅棒72运动,使得所述第二硅棒72与磨具的接触面从硅棒的一端运动至另一端,即完成对相对的两个侧面的研磨;或者,所述第二硅棒夹具31带动第二硅棒72在第一方向迂回运动,使所述第二硅棒72与磨具的接触面在运动中充分覆盖第一硅棒71的侧面。所述第二硅棒夹具31包括至少一对夹臂,所述夹臂为可旋转式,在所述夹臂的夹持下所述第二硅棒72可沿第一方向的轴心线旋转,即实现对所夹持的第二硅棒72的不同侧面的研磨切换与倒角。
175.当位于第二加工区位的第一硅棒71精磨作业完成时,位于第一加工区位的所述第二硅棒72粗磨作业完成。在如图13所示的状态下,第一转移装置中的第一驱动机构驱动第一硅棒夹具21及其夹持的第一硅棒71沿着第一转移导轨移动,以将所述第一硅棒71由第二加工区位转移至等待区位继而将第一硅棒71从等待区位卸载并装载第三硅棒;令第一转移装置中的第一硅棒夹具21夹持第三硅棒,并由第一驱动装置驱动第一硅棒夹具21及其所夹持的第三硅棒沿第一转移导轨移动,使第三硅棒从等待区位转移至第一加工区位,令粗磨装置4对位于第一加工区位处的第三硅棒进行粗磨作业;在此阶段,令第二转移装置中的第二驱动机构驱动第二硅棒夹具31及其夹持的第二硅棒72沿着第二转移导轨移动,以将所述第二硅棒72由第一加工区位转移至第二加工区位,令精磨装置5对位于第二加工区位处的第二硅棒72进行精磨作业。在将所述第一硅棒夹具21与所夹持的第一硅棒71沿第一转移路径从第二加工区位转移至第一加工区位,同时将位于所述第二加工区位的第二硅棒夹具31与其所夹持的第二硅棒72沿第二转移路径从第一加工区位转移至第一加工区位的过程中,由第一硅棒夹具21的升降装置控制其夹臂与第一硅棒71所处水平面的高度,第二硅棒夹具31的升降装置控制其夹臂与所夹持的第二硅棒72所处水平面的高度,在移动中使得所述第一转移路径与第二转移路径处于不同高度的水平面上,即在空间中处于在第三方向上交错的状态,即可避免两硅棒夹具在沿第一方向的移动中路径交叠而发生碰撞。
176.所述第一硅棒夹具21与第一硅棒71在转移至第一加工区位后在第一驱动装置驱动下继续沿第一方向移动以转移至等待区位以进行后续的卸载与第三硅棒的装载。
177.当位于第二加工区位的所述第二硅棒72精磨作业完成时,位于所述第一加工区位的第三硅棒73完成粗磨作业。所述第二转移装置的第二驱动机构驱动所述第二硅棒夹具31及其所夹持的第二硅棒72沿第二转移导轨从第二加工区位转移至等待区位,即可对研磨完成的第二硅棒72卸载并装载新的待研磨硅棒。
178.上述实施例仅例示性说明本申请的原理及其功效,而非用于限制本申请。任何熟悉此技术的人士皆可在不违背本申请的精神及范畴下,对上述实施例进行修饰或改变。因此,举凡所属技术领域中具有通常知识者在未脱离本申请所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本申请的权利要求所涵盖。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1