一种用于加工锥形零件内壁的磁粒研磨装置
1.本实用新型涉及磁粒研磨与光整加工技术领域,尤其涉及一种用于加工锥形零件内壁的磁粒研磨装置。
背景技术:
2.在机械化、自动化不断发展的今天,锥形类零件的应用变得尤为广泛。漏斗是锥形类较为最典型的代表,其内壁的表面质量对加工效率和加工成本有着直接影响。因为锥形零件特有的形状原因,在对其进行磁粒研磨时需要不断调整外部磁极与零件外表面间的距离,使得磁极与磨料间形成闭合的磁回路,进而研磨到所需的加工精度。这种操作不仅费时费力而且效率极低,因此实用新型一种专门用于加工锥形类零件的装置尤为重要。
3.中国专利cn111168483a公开了一种非导磁同心变径管内表面磁粒研磨方法及装置。此装置利用滑片组的移动从而调节磁铁至加工工件外表面的距离,但该装置结构复杂、安装要求高、且加工精度差。
技术实现要素:
4.本实用新型的目的在于提供一种用于加工锥形零件内壁的磁粒研磨装置,可实现对锥型类内壁进行光整加工。能够提高工件表面质量和使用寿命,有效提升研磨速度和研磨质量。
5.为实现上述目的,本实用新型采用以下技术方案实现:
6.一种用于加工锥形零件内壁的磁粒研磨装置,包括机床、外部磁极装置、内部超声波振动磁极装置,所述外部磁极装置设置在工件外部,并能够通过机床上的第一滑台驱动沿工件轴向移动;所述内部超声波振动磁极装置与工件同轴,并能够通过机床上的第二滑台驱动将辅助磁极送入工件内部。
7.所述内部超声波振动磁极装置包括超声波发生器、转换器、集电环、变幅杆、球头连杆、辅助磁极、超声振动装置固定座,所述的转换器、集电环和变幅杆安装在超声波发生器上,所述辅助磁极通过球头连杆安装在变幅杆上,所述超声波发生器安装在超声振动装置固定座上,所述超声振动装置固定座安装在第二滑台上。
8.所述外部磁极装置包括电动缸、红外测距传感器,所述红外测距传感器安装在电动缸端部的磁极上。
9.所述电动缸包括磁极、电动缸丝杠、电动缸套筒、电动缸螺母、电动缸推杆、电动缸轴承、电动缸减速器、电动缸伺服电机,所述电动缸丝杠通过电动缸轴承安装在电动缸套筒中,所述电动缸螺母螺接在电动缸丝杠上、并能够沿着电动缸套筒内壁滑动,所述电动缸推杆的一端与电动缸螺母固定连接,电动缸推杆的另一端伸出电动缸套筒与磁极固定连接,在电动缸推杆与电动缸套筒之间设有导向套,所述电动缸伺服电机通过电动缸减速器传动连接电动缸丝杠。
10.所述工件是非导磁金属锥形管件。
11.与现有的技术相比,本实用新型的有益效果是:
12.本实用新型是一种用于加工各种尺寸锥形零件的装置,可根据工件不同的精度要求,在plc系统中先行设置磁极与工件表面的距离,加工精度高时,可将二者之间的距离值设置较小,为磨料提供较大的研磨压力。加工精度低时,可将距离值设置的大些,避免过度加工。在加工过程中,红外测距传感器通过信号的接收,将所测距离输入到plc系统中,系统根据所设定的参数值驱动电动缸将磁极带到指定位置,以保证磁极与工件表面间的距离。本装置中的超声振动和辅助磁极部分,超声振动装置为辅助磁极提供一个水平方向的振动,使得工件内部的磁性磨料产生高频振动,提高研磨速度,与此同时增强了磁性磨粒翻滚更新的性能,从而提高研磨效率,改善工件的内表面质量。辅助磁极的存在,缩短了磁极间的距离,从而增大磁感应强度,提高了研磨速度和研磨质量。
附图说明
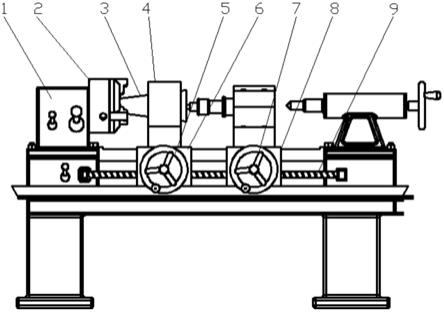
13.图1是本实用新型的整体结构示意图。
14.图2是本实用新型的结构示意俯视图。
15.图3是本实用新型的超声振动部分的结构示意图。
16.图4是图3的左视图。
17.图5是本实用新型电动缸控制部分的结构示意图。
18.图中:1
‑
机床 2
‑
三角卡盘 3
‑
工件 4
‑
电动缸放置架 5
‑
手轮
ⅰꢀ6‑
溜板箱a 7
‑
手轮
ⅱꢀ8‑
溜板箱b 9
‑
丝杠 10
‑
控制手柄 11
‑
电动缸 12
‑
红外测距传感器 13
‑
第一滑台 14
‑
第二滑台 15
‑
超声振动装置固定座 16
‑
超声波发生器 17
‑
转换器 18
‑
集电环 19
‑
变幅杆 20
‑
球头连杆 21
‑
辅助磁极 22
‑
磁极 23
‑
电动缸导向套 24
‑
电动缸丝杠 25
‑
电动缸套筒 26
‑
电动缸螺母 27
‑
电动缸伺服电机 28
‑
电动缸轴承 29
‑
电动缸减速器 30
‑
电动缸推杆。
具体实施方式
19.下面对本实用新型做详细说明,但本实用新型的实施范围不仅仅限于下述的实施方式。
20.如图1
‑
图5所示,一种用于加工锥形零件内壁的磁粒研磨装置,包括机床1、外部磁极装置、内部超声波振动磁极装置,所述外部磁极装置设置在工件3外部,并能够通过机床1上的第一滑台13驱动沿工件3轴向移动;所述内部超声波振动磁极装置与工件3同轴,并能够通过机床1上的第二滑台14驱动将辅助磁极21送入工件3内部。
21.所述内部超声波振动磁极装置包括超声波发生器16、转换器17、集电环18、变幅杆19、球头连杆20、辅助磁极21、超声振动装置固定座15,所述的转换器17、集电环18和变幅杆19安装在超声波发生器16上,所述辅助磁极21通过球头连杆20安装在变幅杆19上,所述超声波发生器16安装在超声振动装置固定座15上,所述超声振动装置固定座15安装在第二滑台14上。
22.所述外部磁极装置包括电动缸11、红外测距传感器12,所述红外测距传感器12安装在电动缸11端部的磁极22上。
23.所述电动缸11包括磁极22、电动缸丝杠25、电动缸套筒25、电动缸螺母26、电动缸推杆30、电动缸轴承28、电动缸减速器29、电动缸伺服电机27,所述电动缸丝杠24通过电动
缸轴承28安装在电动缸套筒25中,所述电动缸螺母26螺接在电动缸丝杠24上、并能够沿着电动缸套筒25内壁滑动,所述电动缸推杆30的一端与电动缸螺母26固定连接,电动缸推杆30的另一端伸出电动缸套筒25与磁极22固定连接,在电动缸推杆30与电动缸套筒25之间设有导向套23,所述电动缸伺服电机27通过电动缸减速器29传动连接电动缸丝杠24。
24.所述工件3是非导磁金属锥形管件。
25.本实用新型的外部磁极装置在工件直径变化的情况下,可以始终保证磁极22与工件3间的最佳距离。内部超声波振动磁极装置使得磨料具有更为复杂的运动轨迹,内部辅助磁极可增强磁感应强度,达到更好的研磨效果。
26.安装在磁极22上的红外测距传感器12通过红外信号来测量磁极22与工件3的距离,进而将指令传给plc控制器,它作为位置反馈装置,用于实时反馈电动缸推杆30位置。电动缸推杆30头部连接磁极22,通过电动缸推杆30的运动,进而改变磁极22与工件3间的距离,以保证达到最佳的研磨效果。plc控制器发送指令给伺服电机驱动器,伺服电机驱动器根据指令驱动电动缸伺服电机27运转,通过电动缸减速器29带动电动缸丝杠24旋转;电动缸螺母26径向定位,在电动缸丝杠24旋转力矩驱动下与电动缸推杆30一起做往复直线运动,电动缸推杆30头部连接磁极22,通过电动缸推杆30的运动,进而改变磁极22与工件3间的距离。在开始加工前根据加工精度的不同要求,提前在plc系统中设置好磁极22与工件3间的最佳距离,既可以提供足够的研磨压力又可避免过度加工。
27.超声振动装置通过球头连杆20与内部辅助磁极21相连,为辅助磁极21提供一个水平方向的振动,使得金属管工件3内部的磁性磨料产生高频振动,提高研磨速度,与此同时增强了磁性磨粒翻滚更新的性能,从而提高研磨效率,改善金属管的内表面质量。
28.超声波发生器16将交流电信号转换成为超声频的电振荡信号,换能器17将超声频的电振荡信号转变为同频的机械振动信号,通过集电环18将机械振动信号收集起来,经过变幅杆19将微小的振动幅值放大,再经过球头连杆20,最终将振动传给内部辅助磁极21,使其做径向超声振动,使得磨料的运动轨迹更为复杂,研磨效果更佳,改善工件3的内表面质量。与此同时增强了磁性磨粒翻滚更新的性能,提高了磨料的自锐性,从而提高研磨效率。
29.一种用于加工锥形零件内壁的磁粒研磨装置的研磨工艺,具体方法如下:
30.1)用三角卡盘将所加工金属管工件3固定在机床1上,将磁性磨料放入工件3内部,移动第一滑台13,使外部磁极装置的磁极22置于工件3的初始研磨位置,移动第二滑台14使内部超声波振动磁极装置的辅助磁极21进入到工件3内部并与所述磁极22相对,使其形成闭合磁场;
31.2)根据工件3精度要求自行在plc控制系统中设定磁极22与工件3外表面的距离,使工作后磁极22始终能够保持与工件3表面间的距离恒定;再将超声振动产生的振幅加在辅助磁极21上,在此作用下提高了磨料的振动频率,带动磨料灵活地翻滚,更好地完成切削刃自锐,进而加工质量和加工效率;
32.3)启动机床1电机,实现三角卡盘带动工件3完成与机床1主轴同转速的旋转运动;
33.4)使溜板箱a6和溜板箱b8同步运动,以保证内部辅助磁极21与磁极22始终形成闭合磁场,带动磁性磨料进行研磨;
34.5)利用红外测距传感器12实时测量磁极21与工件3的距离,通过测量信号的反馈,使磁极21能够在沿着锥形工件3轴向移动的过程中进行伸缩,从而保证磁极21与工件3表面
的距离,达到最佳研磨效果。
35.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1