一种钢水检测系统的制作方法
1.本实用新型涉及检测技术领域,特别是涉及一种钢水检测系统。
背景技术:
2.在冶金流程中,需要对铁水或者钢水进行检测,在出铁厂铁水/钢水、转炉、电炉、lf炉、rh炉、连铸中间包、vd炉中都需要进行检测,检测项目一般包括测温、取样和定氧。常见的测温取样定氧机器人系统为机器人末端安装测枪装置,机器人运动到探头箱进行探头接插,安装指定的探头,然后执行测温/取样/定氧作业。然而某些工位受生产时序的影响,以上作业方式周期过长可能会影响正常的生产。
技术实现要素:
3.鉴于以上所述现有技术的缺点,本实用新型的目的在于提供一种钢水检测系统,用于解决现有技术中钢水检测不便的问题。
4.为实现上述目的及其他相关目的,本实用新型提供一种钢水检测系统,包括:
5.测枪装置,所述测枪装置的末端设有可拆卸连接的探头,并用于执行钢水检测动作,所述钢水检测动作至少包括以下之一:测温、取样、定氧动作;
6.机器人,用于执行拆、装探头动作;
7.检测孔装置,用于开启或者关闭检测孔;
8.控制模块,所述测枪装置、所述机器人、所述检测孔装置与所述控制模块信号连接。
9.可选的,所述钢水检测系统还包括:
10.探头存放箱,用于批量存放各种探头;
11.探头回收箱,用于分类存放使用过的探头。
12.可选的,所述测枪装置包括电机、导向单元和法兰单元,所述电机与所述法兰单元连接,所述法兰单元与探头连接,转动所述电机带动所述法兰单元沿着导向单元的导向朝向钢包或者远离钢包运动。
13.可选的,还包括:
14.安全护栏,用于将机器人动作区域和工人作业区域分开,提高现场操作人员的安全性;
15.远程监控系统,用于监控系统工作状态,根据监控图像判断当前作业状态并决定下步工作操作;
16.紧急事故避让装置,用于处理紧急状态,多点布置急停按钮,当系统响应急停要求,终止所有动作;
17.报警显示灯,包括声光报警器及状态灯柱,声光报警器提示系统正在作业中,状态灯柱显示当前测温/取样/定氧动作执行状态。
18.可选的,所述检测模块还包括钢水液面高度检测传感器、测温/定氧仪表、钢包到
位传感器;
19.通过将钢水液面高度检测传感器采集钢包液面高度,并将钢包液面高度传输至控制模块中,指导测枪装置枪管的下降深度;
20.测温/定氧仪表包括测温/定氧接插件、测温/定氧仪器、传输电缆及现场显示屏,测温/定氧接插件安装于测枪装置枪管末端,获取钢水温度或氧含量信号,钢水温度或氧含量信号经传输电缆送至测温/定氧仪表;
21.钢包到位传感器检测钢包的到站信号,并将到位信号传至控制模块。
22.如上所述,本实用新型的钢水检测系统,具有以下有益效果:
23.能够满足测温、取样、定氧作业周期短的需求,还能够根据测温、取样、定氧指令快速反应,立马执行动作。
附图说明
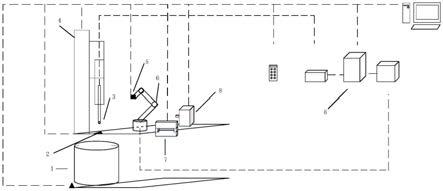
24.图1显示为本实用新型实施例提供的钢水检测系统示意图。
25.图2显示为本实用新型实施例提供的钢水检测系统的另一示意图。
26.图3显示为本实用新型实施例提供的钢水检测方法示意图。
具体实施方式
27.以下通过特定的具体实例说明本实用新型的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本实用新型的其他优点与功效。本实用新型还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本实用新型的精神下进行各种修饰或改变。
28.需要说明的是,本实施例中所提供的图示仅以示意方式说明本实用新型的基本构想,遂图式中仅显示与本实用新型中有关的组件而非按照实际实施时的组件数目、形状及尺寸绘制,其实际实施时各组件的型态、数量及比例可为一种随意的改变,且其组件布局型态也可能更为复杂。本说明书所附图式所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本实用新型可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本实用新型所能产生的功效及所能达成的目的下,均应仍落在本实用新型所揭示的技术内容得能涵盖的范围内。同时,本说明书中所引用的如“上”、“下”、“左”、“右”、“中间”及“一”等的用语,亦仅为便于叙述的明了,而非用以限定本实用新型可实施的范围,其相对关系的改变或调整,在无实质变更技术内容下,当亦视为本实用新型可实施的范畴。
29.请参考图1,本实用新型提供一种钢水检测系统,包括:
30.测枪装置4,所述测枪装置的末端设有可拆卸连接的探头,并用于执行钢水检测动作,所述钢水检测动作至少包括以下之一:测温、取样、定氧动作;
31.机器人6,用于执行拆、装探头动作;
32.检测孔装置2,用于开启或者关闭检测孔;
33.控制模块8,所述测枪装置、所述机器人、所述检测孔装置与所述控制模块信号连接。当钢包1到到测量位置时,检测孔装置2将检测孔打开,机器人根据检测动作需求,将相应的探头3换装在测枪装置4上,测枪装置4穿过检测孔对钢包1进行检测动作,完成测温/取
样/定氧动作。能够满足测温、取样、定氧作业周期短的需求,还能够根据测温、取样、定氧指令快速反应,立马执行动作。
34.为了便于探头的分拣、安装和管理,在一些实施过程中,所述钢水检测系统还包括:探头存放箱7,用于批量存放各种探头3;探头回收箱8,用于分类存放使用过的探头。
35.请参考图2,所述测枪装置4包括电机41、导向单元42和法兰单元43,所述电机与所述法兰单元连接,实现法兰单元43与探头3之间的可拆卸连接,所述法兰单元与探头连接,转动所述电机带动所述法兰单元沿着导向单元的导向朝向钢包或者远离钢包运动。
36.钢水检测系统还包括:
37.安全护栏,用于将机器人动作区域和工人作业区域分开,提高现场操作人员的安全性;
38.远程监控系统,用于监控系统工作状态,根据监控图像判断当前作业状态并决定下步工作操作;
39.紧急事故避让装置,用于处理紧急状态,多点布置急停按钮,当系统响应急停要求,终止所有动作;
40.报警显示灯,包括声光报警器及状态灯柱,声光报警器提示系统正在作业中,状态灯柱显示当前测温/取样/定氧动作执行状态。
41.可选的,检测模块还包括测温/定氧仪表、钢包到位传感器;
42.测枪装置枪管测温/定氧仪表包括测温/定氧接插件、测温/定氧仪器、传输电缆及现场显示屏,测温/定氧接插件安装于测枪装置枪管末端,获取钢水温度或氧含量信号,钢水温度或氧含量信号经传输电缆送至测温/定氧仪表;
43.钢包到位传感器检测钢包的到站信号,并将到位信号传至控制模块。
44.本实施例中,探头存放箱批量存放各类探头。收到上位控制系统测温、定氧或取样信号后,探头存放箱自动筛选对应探头至机器人插接点。探头存放箱支持各探头工作次数统计,人工进行设置、修改;具备探头余量偏低预警功能。测温枪存放数量不低于40个、取样器存放数量不低于25个、定氧管不低于15个。本实施例中,探头回收箱用于分类存放已用探头,其中取样探头按时间顺序放置,以便工人分辨不同探头对应第几次取样。
45.本实施例中,检测孔自动控制装置用于实现检测孔自动开合控制,根据工作时序开合检测孔,以为测枪执行测温取样定氧动作提供空间。
46.本实施例中,检测模块主要包括钢水液面高度检测传感器系统、测温/定氧仪表、钢水到位传感器。
47.1)钢水液面高度检测传感器系统
48.由钢水液面高度检测传感器、防护装置组成,通过将传感器及防护装置安装于适于合适位置,采集钢包液面高度,并将高度信息传输至作业系统plc中,指导测枪装置的下降深度。
49.2)测温/定氧仪表
50.测温/定氧仪表由测温/定氧接插件、测温/定氧仪器、传输电缆及现场显示屏组成。测温/定氧接插件安装于测温/定氧枪管末端,获取钢水温度或氧含量信号。信号经传输电缆送至操作室测温/定氧仪表,仪表将处理后的温度/氧含量返回至系统plc中。
51.3)钢包到位传感器
52.现场配有钢包到位传感器,实时检测钢包位置状态,并将到位信号传至系统plc与系统联锁。同时,系统还具备解除此联锁的功能,应对特殊情况或联锁设备故障情况的发生。
53.本实施例中,电气控制系统由plc控制器、用户操作台、现场操作箱组成。plc控制柜内设plc控制器为系统主plc,是整个测温取样机器人系统的核心控制单元;操作台由工控机系统及显示器组成,工控机系统配置用户操作界面、plc编程软件等;现场操作盒放置于作业平台上,进行简单的系统操作控制。系统架构如图2所示。系统主plc控制器接收来自用户操作台、现场操作盒、吹氩站主plc的信号,并与机器人控制柜、探头存放箱、探头回收箱、测枪装置、检测模块、检测孔装置进行数据交换与控制指令下发。系统配置手动/自动操作模式、远程/本地操作模式;实时监控系统各参数运行情况,具有故障报警与诊断功能;具备拆装探头卡死后一键复位功能;具备操作记录、报警记录功能。
54.请参阅图3,本实用新型提供一种钢水检测方法,包括:
55.s1:钢包站接收钢包到站信号,打开平台检测孔,采集钢水的液面高度;
56.s2:获取钢水检测指令,其中,所述钢水检测指令至少包括以下之一:测温、取样、定氧动作指令;
57.s3:根据所述钢水检测指令对钢水进行检测,测枪装置枪管探头进行拆装;
58.s4:钢包离开,平台检测孔关闭。能够满足测温、取样、定氧作业周期短的需求,还能够根据测温、取样、定氧指令快速反应,立马执行动作。
59.在一些实施过程中,所述钢包站三层,第一层用于钢包车走行,第二层用于人工进行测温、取样、定氧作业,第三层用于放置测温取样机器人系统;钢包到钢包站后,启动第三层平台上的检测孔装置,打开检测孔。例如,钢包位于精炼炉吹氩站,吹氩站共设三层平台,第一层用于钢包车走行,第二层用于人工进行测温、取样、定氧作业,第三层用于放置测温取样机器人系统。钢包到站后,启动第三层平台上的检测孔装置,打开检测孔,为后续测枪插入钢水做好准备。检测模块感知钢包内钢水液面高度,并将高度信息传递给系统主plc。主plc接收到钢水液面高度与测温/取样/定氧指令后控制相应测枪进入钢水进行测温/取样/定氧动作,测枪运动的动态行程由钢水液面高度检测模块获取的高度进行指导,动态行程为钢水液面高度加上300mm。检测模块选用双目视觉传感器,钢包到站后,通知视觉系统启动摄像机实时采集钢包中钢液面的图像,通过自动曝光、自适应阈值分割得到钢渣与钢水之间形成的钢渣缝的边缘,根据钢渣缝隙的位置以及边缘强度,智能分析出合适的边缘纹理,利用双目相机视觉系统识别匹配同类型的边缘纹理,得到其在相机坐标系下的坐标。通过标定转换得到其在钢包坐标系下的坐标,从而测量出钢包中钢液面的高度。
60.在一些实施过程中,根据所述钢水检测指令对测枪装置枪管探头进行拆装的步骤包括:当测枪装置枪管上的探头处于已使用或为空状态,测枪装置枪管进行拆探头和/或装探头。采集测枪装置枪管探头进行拆装的记录,判断测枪装置枪管探头是否已使用并且测枪装置枪管不在使用过程中,如果不在,则机器人对测枪装置枪管进行拆探头;如果在执行所述钢水检测指令中时判定探头为使用过程中,则在完成所述钢水检测指令后,机器人对测枪装置枪管进行拆探头。当不存在已经使用过的探头并且存在测枪装置枪管的探头为空状态时,则此时判断测枪装置枪管是否在执行所述钢水检测指令中并且确定探头箱内探的头数量正常,如果此时判断测枪装置枪管没在执行所述钢水检测指令中,则执行装探头动
作,如果在执行所述钢水检测指令中,则在完成所述钢水检测指令后,测枪装置枪管进行装探头。例如,在s3中,
61.s31:根据系统主plc对作业过程的记录,检测到某个探头已经使用;
62.s32:此时判断测枪装置枪管是否在测温/取样/定氧中,若不在,则跳转到s33,若在,则跳转至s34;
63.s33:机器人执行拆探头动作,动作完成后跳转到s35;
64.s34:等候测枪完成测温/取样/定氧动作后,跳转到s33;
65.s35:根据系统主plc对作业过程的记录,没有存在已经使用过的探头并且某个测枪装置枪管探头为空;
66.s36:此时判断测枪装置枪管是否在测温/取样/定氧中并且探头箱内探头数量没有报警;
67.s37:如果此时不在测温定氧中,则跳转到s38,如果此时测枪装置枪管在运动中,则跳转到s39;
68.s38:机器人执行装探头动作,动作完成后跳转到s31;
69.s39:等候测枪装置枪管完成等候测枪装置枪管完成测温/取样/定氧动作后,跳转到s38。
70.上述实施例仅例示性说明本实用新型的原理及其功效,而非用于限制本实用新型。任何熟悉此技术的人士皆可在不违背本实用新型的精神及范畴下,对上述实施例进行修饰或改变。因此,举凡所属技术领域中具有通常知识者在未脱离本实用新型所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本实用新型的权利要求所涵盖。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1