真空清洗机的制作方法
1.本技术涉及真空清洗技术领域,尤其涉及一种应用于pvd真空镀膜的真空清洗机。
背景技术:
2.对工件镀膜(例如,pvd真空镀膜)之前,需要对工件表面进行清洗,以增加膜层与工件的结合力。
3.通常采用的工件表面清洗的方法有吹气处理、擦拭处理或烘烤处理等等。其中最常用的烘烤处理为将工件进行烘烤,但此种方法处理时间长,影响生产产能。
技术实现要素:
4.有鉴于此,有必要提供一种应用于pvd真空镀膜的真空清洗机,以解决上述问题。
5.一种真空清洗机,其内部容纳有惰性气体,所述真空清洗机用于清洁工件的表面,所述真空清洗机包括阴极模块、磁场过滤单元及阳极模块,阴极模块用于产生第一正离子和电子;磁场过滤单元与所述阴极模块连接,所述第一正离子和所述电子穿过所述磁场过滤单元;阳极模块位于所述磁场过滤单元背离所述阴极模块的一侧;其中,所述工件置于所述阳极模块的一侧,所述阳极模块产生正电场加快所述电子的运动速度,以激发所述惰性气体产生第二正离子,所述第一正离子以及所述第二正离子到达所述工件的表面,以清洁所述工件的表面。
6.进一步地,所述真空清洗机还包括炉体,所述阳极模块以及所述惰性气体位于所述炉体中,所述磁场过滤单元与所述炉体连接,所述阴极模块位于所述磁场过滤单元背离所述炉体的一端。
7.进一步地,所述阳极模块包括安装板及金属棒,安装板设置于所述炉体上,金属棒与所述安装板连接并位于所述炉体中,所述金属棒用于通电产生所述正电场,以加速所述电子的运动。
8.进一步地,所述磁场过滤单元包括:弧形管道及线圈,弧形管道与所述炉体连通;线圈位于所述弧形管道的外壁,用于改变经过所述弧形管道的第一正离子以及所述电子的运动方向以及运动速度。
9.进一步地,所述金属棒的延伸方向与所述弧形管道的延伸方向垂直。
10.进一步地,所述线圈包括聚焦线圈,缠绕于所述弧形管道的外壁并临近所述阴极模块设置,用于形成磁场以聚焦所述第一正离子以及所述电子。
11.进一步地,所述线圈还包括偏转线圈,缠绕于所述弧形管道并位于所述聚焦线圈背离所述阴极模块的一侧,用于形成磁场以改变所述第一正离子以及所述电子的运动方向。
12.进一步地,所述线圈还包括发散线圈,缠绕于所述弧形管道并位于所述偏转线圈背离所述聚焦线圈的一侧,且临近所述炉体设置,用于形成磁场以发散所述第一正离子以及所述电子至所述炉体中。
13.进一步地,所述金属棒包括铜棒。
14.进一步地,所述阴极模块包括弧靶以及引弧针,引弧针用于接触所述弧靶以产生所述第一正离子和所述电子。
15.本技术提供了应用于pvd真空镀膜的真空清洗机,其内部容纳有惰性气体,真空清洗机设置有阴极模块、磁场过滤单元以及阳极模块。通过阴极模块产生可以用于清洗工件表面的第一正离子以及快速运动的第一电子;磁场过滤单元去除第一正离子以及第一电子中未被激发出第一正离子和第一电子的金属蒸汽,以防止金属蒸汽达到工件表面而对工件的表面的装饰性外观造成伤害;阳极模块吸引第一电子以使第一电子加速运动从而激发惰性气体产生用于清洗工件表面的第二正电子以及用于再次激发惰性气体的第二电子,从而达到清洗工件的目的。上述真空清洗机清洗工件时间短、生产能高,且不会损坏工件。
附图说明
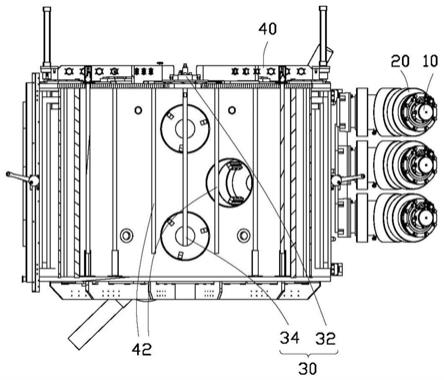
16.图1为本技术实施例提供的真空清洗机的整体结构示意图。
17.图2为图1所示的磁场过滤单元沿ii
‑
ii方向的截面示意图。
18.图3为图1所示的炉体沿iii
‑
iii方向的截面示意图。
19.主要元件符号说明
[0020][0021][0022]
如下具体实施方式将结合上述附图进一步说明本技术。
具体实施方式
[0023]
为了能够更清楚地理解本技术的上述目的、特征和优点,下面结合附图和具体实施方式对本技术进行详细描述。需要说明的是,在不冲突的情况下,本技术的实施方式及实施方式中的特征可以相互组合。在下面的描述中阐述了很多具体细节以便于充分理解本技术,所描述的实施方式仅仅是本技术一部分实施方式,而不是全部的实施方式。基于本技术中的实施方式,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施方式,都属于本技术保护的范围。
[0024]
除非另有定义,本文所使用的所有的技术和科学术语与属于本技术的技术领域的技术人员通常理解的含义相同。本文中在本技术的说明书中所使用的术语只是为了描述具体的实施方式的目的,不是旨在于限制本技术。本文所使用的术语“和/或”包括一个或多个相关的所列项目的所有的和任意的组合。
[0025]
在本技术的各实施例中,为了便于描述而非限制本技术,本技术专利申请说明书以及权利要求书中使用的术语“连接”并非限定于物理的或者机械的连接,不管是直接的还是间接的。“上”、“下”、“上方”、“下方”、“左”、“右”等仅用于表示相对位置关系,当被描述对象的绝对位置改变后,则该相对位置关系也相应地改变。
[0026]
请参阅图1,本技术实施例提供一种应用于pvd(physical vapour deposition,物理气相沉积)真空镀膜的真空清洗机100,用于清洁工件的表面。在pvd真空镀膜工艺中,通过引弧针碰撞弧靶产生待被镀到工件表面的等离子流,但是由于该碰撞导致弧靶局部区域过热,进而导致一些大粒径的金属液滴的喷射。这些金属液滴可能随同等离子流一起到达工件表面,以致镀层表面粗糙度增加、镀层附着力降低并且出现剥落现象。对此,将本技术的真空清洗机100应用于pvd真空镀膜,能够将这些金属液滴过滤掉,仅使等离子流到达工件表面,从而提高pvd真空镀膜的品质。需要说明的是,该真空清洗机100能够应用于在pvd真空镀膜之前,对工件进行预先清洗;该真空清洗机100能够应用于在pvd真空镀膜之时,对工件进行同步清洗和镀膜。
[0027]
如图1所示,真空清洗机100包括阴极模块10、磁场过滤单元20以及阳极模块30,磁场过滤单元20连接阴极模块10,阳极模块30位于磁场过滤单元20背离阴极模块10的一侧,工件位于阳极模块30朝向阴极模块10的周缘。
[0028]
进一步,真空清洗机100还可以包括炉体40。阳极模块30以及惰性气体位于炉体40中,磁场过滤单元20与炉体40连接,阴极模块10位于磁场过滤单元20背离炉体40的一端。
[0029]
请参阅图2,阴极模块10包括弧靶12和引弧针14,引弧针14与弧靶12相距一定距离设置,引弧针14碰撞弧靶12,引发弧靶12短路激发电弧点,激发弧靶12的表面产生大量第一正离子和第一电子。例如,弧靶12由金属构成,该第一正离子此时为金属离子。
[0030]
在引弧针14碰撞弧靶12时,随着产生大量第一正离子和第一电子的同时,也会存在未被激发的金属蒸汽。金属蒸汽聚集形成大颗粒的金属团,这时候大颗粒的金属团也会随着第一正离子和第一电子射出,这些大颗粒的金属团如果射出到达工件的表面,将会对工件的表面造成较大的撞击,对工件的表面的装饰性外观造成伤害,使得后续的镀膜层产生麻点,不符合镀膜的要求,所以在对工件的表面进行清洗时只允许第一正离子和第一电子到达工件表面,而不允许金属团等较大颗粒到达工件表面,才能保证在对工件的表面的氧化物、杂质、气体等进行清洗的同时不会造成装饰性外观的损害。
[0031]
请再次参阅图2,磁场过滤单元20包括弧形管道22和线圈24。弧形管道22内部为中空结构,阴极模块10位于弧形管道22的一端,阴极模块10产生的第一正离子和第一电子从弧形管道22内部穿过。线圈24缠绕于弧形管道22的周围,线圈24用于在弧形管道22内产生磁场,磁场使得弧形管道22内的第一正离子和第一电子沿着弧形管道22进行弧形轨迹的运动,便于第一正离子和第一电子经过弧形管道22到达工件的表面。由于弧形管道22为弧形,且金属团等较大颗粒并不带电,所以在磁场中也不会发生运动轨迹偏转的现象,所以对于直线运动的金属团等大颗粒具有一定的阻碍作用,金属团等大颗粒进行直线运动就会接触到弧形管道22的内壁,从而防止金属团等大颗粒到达工件的表面。可见,通过弧形管道22和磁场的作用,最后能够穿过弧形管道22的只有第一正离子和第一电子。
[0032]
线圈24包括聚焦线圈242、偏转线圈244以及发散线圈246。聚焦线圈242、偏转线圈244以及发散线圈246相距一定距离设置并依次缠绕于弧形管道22的外壁,其中,聚焦线圈242位于临近阴极模块10设置,发散线圈246远离阴极模块10设置,偏转线圈244位于聚焦线圈242与发散线圈246之间。聚焦线圈242用于产生磁场以聚焦第一正离子和第一电子;偏转线圈244用于产生磁场以偏转第一正离子和第一电子,以改变它们的运动方向;发散线圈246用于产生磁场以发散第一正离子和第一电子,并还可以加速它们的运动速度,从而使第一正离子和第一电子快速到达阳极模块30。其中,聚焦线圈242、偏转线圈244以及发散线圈246可以通过电流大小、电流方向控制磁场的磁通量、磁场方向等以实现聚焦线圈242、偏转线圈244以及发散线圈246各自的功能。
[0033]
进一步地,聚焦线圈242、偏转线圈244以及发散线圈246以相同的分度依次缠绕于弧形管道22的外壁。
[0034]
请参阅图3,阳极模块30包括安装板32以及金属棒34。在一个实施例中,安装板32设置于炉体40上,金属棒34与安装板32连接并位于炉体40中,金属棒34用于通电产生正电场,以吸引第一电子,增加第一电子的运动速度,从而撞击惰性气体产生第二正离子以及第二电子。金属棒34可以是铜棒、银棒等。惰性气体可以是氦气、氩气等。金属棒34的延伸方向与弧形管道22的延伸方向垂直,以使金属棒34产生的电场的方向与第一正离子与第一电子从弧形管道22的端部进入炉体40的运动方向平行,以最大化增加第一电子的运动速度,从而提升第一电子撞击惰性气体产生第二正离子以及第二电子的效率。
[0035]
进一步地,炉体40上还设置有固定件(图未标)以及连接固定件的挂具42,挂具42用于悬挂工件,固定件围绕各自的中心轴可旋转地设置在炉体40上,并带动挂具42旋转。在本实施方式中,固定件设置于炉体40的顶部,挂具42与金属棒34平行设置,挂具42的数量为多个,以使真空清洗机100同时对多个工件进行处理。
[0036]
在一些实施方式中,固定件可以整体旋转,以带动多个挂具42绕某一中心公转,以使位于每一挂具42上的工件都可以经过磁场过滤单元20附近,以使每一工件均可以受到第一正离子的撞击,使得工件的表面得到清洁。
[0037]
真空清洗机100在工作过程中,炉体40中通入惰性气体,金属棒34位于惰性气体中,金属棒34的周围产生正电场,经过磁场过滤单元20达到炉体40的第一正离子在正电场的作用下减速运动到工件的表面撞击位于磁场过滤单元20与金属棒34之间的工件清洗工件的表面;经过磁场过滤单元20的第一电子在正电场的作用下加速运动,撞击惰性气体,激发惰性气体产生第二正离子和第二电子,第二正离子在正电场的排斥作用下远离阳极模块
30的中心运动,从而撞击位于金属棒34周缘的工件以清洗工件的表面;第二电子在正电场的作用下加速朝向阳极模块30的中心运动,再次撞击惰性气体,如此反复循环,从而清洗工件表面。即,第一正离子以及第二正离子均用于清洗工件,其中,第一正离子清洗位于磁场过滤单元20与金属棒34之间的工件;第一电子以及第二电子均用于激发惰性气体产生第二正离子以及更多的第二电子。
[0038]
进一步地,真空清洗机100可以采用脉冲的方式对工件进行清洗,其清洗工件的时间短,例如30s
‑
10min,可以根据工件表面情况进行调整。在一些实施方式中,还可以根据清洗过程中工件表面的温度(例如140℃)进行调整,这是因为大量第一正离子、第二正离子对工件的撞击产生热量,导致工件温度升高。
[0039]
本技术提供了真空清洗机100,其内部容纳有惰性气体,真空清洗机设置有阴极模块10、磁场过滤单元20以及阳极模块30。通过阴极模块10产生可以用于清洗工件表面的第一正离子以及快速运动的第一电子;磁场过滤单元20去除第一正离子以及第一电子中未被激发出第一正离子和第一电子的金属蒸汽,以防止金属蒸汽达到工件表面而对工件的表面的装饰性外观造成伤害;阳极模块30吸引第一电子以使第一电子加速运动从而激发惰性气体产生用于清洗工件表面的第二正电子以及用于再次激发惰性气体的第二电子,从而达到清洗工件的目的。上述真空清洗机100清洗工件时间短、生产能高,且不会损坏工件。
[0040]
以上实施方式仅用以说明本技术的技术方案而非限制,尽管参照以上较佳实施方式对本技术进行了详细说明,本领域的普通技术人员应当理解,可以对本技术的技术方案进行修改或等同替换都不应脱离本技术技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1