一种半导体晶片机械抛光加工系统及方法与流程
一种半导体晶片机械抛光加工系统及方法
1.本申请是申请日为2019年5月1日,申请号为cn201910435579.7的发明名称为基于双位定位原理的半导体晶片机械抛光加工装置的分案申请。
技术领域
2.本发明涉及半导体领域,尤其是涉及到一种半导体晶片机械抛光加工系统及方法。
背景技术:
3.半导体晶片是生产集成电路的主要原材料,尺寸越大则每片晶片上可以制造的芯片数量就越多,从而制造成本就越低,晶片尺寸的扩大和芯片线宽的减小是集成电路行业技术进步的两条主线,生产过程中最重要的工艺是抛光晶圆片,此工艺在超净间中进行大多数生产型晶圆片都要经过两三次的抛光,抛光料是细浆或者抛光化合物。市面上现有技术在使用过程中存在这样的问题:
4.目前的机械抛光设备采用负压吸附进行晶片的固定,但由于晶片材料较薄,且变形量大,加工时无法根据晶片的直径进行定位吸附,且吸附力度也无法进行调整,容易造成晶片变形损坏。
技术实现要素:
5.针对现有技术存在的不足,本发明目的是提供一种半导体晶片机械抛光加工系统及方法,以解决目前的机械抛光设备采用负压吸附进行晶片的固定,但由于晶片材料较薄,且变形量大,加工时无法根据晶片的直径进行定位吸附,且吸附力度也无法进行调整,容易造成晶片变形损坏的问题。
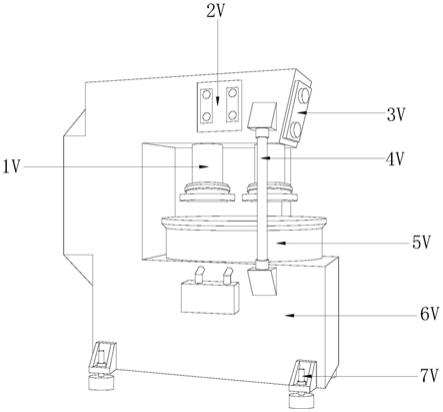
6.为了实现上述目的,本发明是通过如下的技术方案来实现:一种半导体晶片机械抛光加工系统及方法,其结构包括抓取机构、伺服器、控制面板、立柱、抛光基座、设备主体、固定地脚,固定地脚设有四个,且通过扣合方式安装于设备主体底部,设备主体顶部前端设有控制面板,立柱设有两个,且通过扣合方式安装于设备主体左右两侧,设备主体中部设有固定安装抛光基座的凹槽,抓取机构设有两个,且通过扣合方式安装于设备主体中部上端,设备主体左侧上端设有伺服器。
7.作为本技术方案的进一步优化,抓取机构包括定位真空轴、调位组件、定位机构,调位组件为圆形结构,且底部与定位机构顶部相嵌合,定位真空轴为圆筒形结构,且底部通过扣合方式安装于调位组件中部。
8.作为本技术方案的进一步优化,调位组件包括密闭机构、外环、弧形刮板、刷轮,弧形刮板设有两个,且通过扣合方式安装于刷轮内部两端,刷轮通过套合方式安装于外环四周,外环内部设有密闭机构,密闭机构与定位真空轴联通,弧形刮板与密闭机构相连接。
9.作为本技术方案的进一步优化,密闭机构包括摆动压轴、双位滑块、折叠圆页、固定环、收纳槽,收纳槽设有两个,且通过扣合方式安装于固定环内部两端,折叠圆页分别与
收纳槽内部相连接,摆动压轴底部贯穿连接折叠圆页,双位滑块底部两端与摆动压轴顶部相扣合。
10.作为本技术方案的进一步优化,定位机构包括负压外环、负压内环、内置连接口、外置吸孔,外置吸孔设有两个以上,且呈环形阵列方式分布于定位机构底部,定位机构内部上端设有负压外环,负压外环顶部与摆动压轴底部相贴合,负压内环通过嵌入方式安装于负压外环内部,内置连接口设有两个以上,且均匀等距分布于负压外环、负压内环底部,外置吸孔与内置连接口相连通。
11.作为本技术方案的进一步优化,弧形刮板弧形末端均设有凸位,用于与双位滑块进行卡合,从而实现同步的联动效果。
12.作为本技术方案的进一步优化,摆动压轴底部设有滚珠,并且与负压外环、负压内环顶面接触,从而确保在移动过程中提高滑动性,避免阻力。
13.作为本技术方案的进一步优化,负压内环顶部两端均为斜面设计,在摆动压轴经过时通过斜面进行下压带动,从而确保内置连接口与外置吸孔能够形成负压相通。
14.有益效果
15.本发明一种半导体晶片机械抛光加工系统及方法,将需要抛光的晶片放置在抓取机构底部,而后通过控制面板启动伺服器,进而驱动抛光基座进行旋转升降,并对抓取机构底部的晶片进行加工,针对不同直径的晶片加工,可以借助调位组件控制定位机构底部的吸附范围,避免吸附范围不均匀造成变形,外环与定位真空轴套合,且内部由密闭机构进行密封,在需要调整时通过刷轮带动弧形刮板与密闭机构形成扣动,使密闭机构展开,进而完成真空负压的连通,通过双位滑块接触弧形刮板进行联动,转动过程中摆动压轴同步带动折叠圆页移动,从而控制固定环的通畅性,折叠圆页完全打开时通过收纳槽进行收集,负压外环与负压内环分为两个吸附直径范围,当双位滑块转动纵向状态时,摆动压轴处于负压内环顶部进行下压,使内置连接口与内部范围的外置吸孔连通,在双位滑块转动横向状态时摆动压轴则下压负压外环,进而连接外部范围的外置吸孔。
16.基于现有技术而言,本发明操作后可达到的优点有:
17.抓取机构在切换不同直径大小的晶片加工时,通过调位组件控制定位机构内的负压疏通值,且能够分别转换负压外环与负压内环的单独吸附,实现了不同直径范围的外置吸孔变换,以便于根据不同大小的晶片进行局限调整,确保了吸附力度的平均,避免造成晶片变形损坏。
附图说明
18.通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
19.图1为本发明一种半导体晶片机械抛光加工系统及方法的结构示意图。
20.图2为本发明一种半导体晶片机械抛光加工系统及方法的抓取机构结构示意图。
21.图3为本发明一种半导体晶片机械抛光加工系统及方法的调位组件内部结构俯视图。
22.图4为本发明一种半导体晶片机械抛光加工系统及方法的密闭机构结构示意图。
23.图5为本发明一种半导体晶片机械抛光加工系统及方法的抓取机构内部结构侧视
图。
24.图6为本发明一种半导体晶片机械抛光加工系统及方法的负压外环与负压内环透视结构示意图。
25.附图中标号说明:抓取机构
‑
1v、伺服器
‑
2v、控制面板
‑
3v、立柱
‑
4v、抛光基座
‑
5v、设备主体
‑
6v、固定地脚
‑
7v、定位真空轴
‑
1v01、调位组件
‑
1v02、定位机构
‑
1v03、密闭机构
‑
1v021、外环
‑
1v022、弧形刮板
‑
1v023、刷轮
‑
1v024、摆动压轴
‑
1v0211、双位滑块
‑
1v0212、折叠圆页
‑
1v0213、固定环
‑
1v0214、收纳槽
‑
1v0215、负压外环
‑
1v031、负压内环
‑
1v032、内置连接口
‑
1v033、外置吸孔
‑
1v034。
具体实施方式
26.为使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式以及附图说明,进一步阐述本发明的优选实施方案。
27.在本发明中所提到的上下、里外、前后以及左右均以图1中的方位为基准。
28.实施例
29.请参阅图1
‑
图6,本发明提供一种半导体晶片机械抛光加工系统及方法,其结构包括抓取机构1v、伺服器2v、控制面板3v、立柱4v、抛光基座5v、设备主体6v、固定地脚7v,所述固定地脚7v设有四个,且通过扣合方式安装于设备主体6v底部,所述设备主体6v顶部前端设有控制面板3v,所述立柱4v设有两个,且通过扣合方式安装于设备主体6v左右两侧,所述设备主体6v中部设有固定安装抛光基座5v的凹槽,所述抓取机构1v设有两个,且通过扣合方式安装于设备主体6v中部上端,所述设备主体6v左侧上端设有伺服器2v,将需要抛光的晶片放置在抓取机构1v底部,而后通过控制面板3v启动伺服器2v,进而驱动抛光基座5v进行旋转升降,并对抓取机构1v底部的晶片进行加工。
30.所述抓取机构1v包括定位真空轴1v01、调位组件1v02、定位机构1v03,所述调位组件1v02为圆形结构,且底部与定位机构1v03顶部相嵌合,所述定位真空轴1v01为圆筒形结构,且底部通过扣合方式安装于调位组件1v02中部,针对不同直径的晶片加工,可以借助调位组件1v02控制定位机构1v03底部的吸附范围,避免吸附范围不均匀造成变形。
31.所述调位组件1v02包括密闭机构1v021、外环1v022、弧形刮板1v023、刷轮1v024,所述弧形刮板1v023设有两个,且通过扣合方式安装于刷轮1v024内部两端,所述刷轮1v024通过套合方式安装于外环1v022四周,所述外环1v022内部设有密闭机构1v021,所述密闭机构1v021与定位真空轴1v01联通,所述弧形刮板1v023与密闭机构1v021相连接,外环1v022与定位真空轴1v01套合,且内部由密闭机构1v021进行密封,在需要调整时通过刷轮1v024带动弧形刮板1v023与密闭机构1v021形成扣动,使密闭机构1v021展开,进而完成真空负压的连通。
32.所述密闭机构1v021包括摆动压轴1v0211、双位滑块1v0212、折叠圆页1v0213、固定环1v0214、收纳槽1v0215,所述收纳槽1v0215设有两个,且通过扣合方式安装于固定环1v0214内部两端,所述折叠圆页1v0213分别与收纳槽1v0215内部相连接,所述摆动压轴1v0211底部贯穿连接折叠圆页1v0213,所述双位滑块1v0212底部两端与摆动压轴1v0211顶部相扣合,通过双位滑块1v0212接触弧形刮板1v023进行联动,转动过程中摆动压轴1v0211同步带动折叠圆页1v0213移动,从而控制固定环1v0214的通畅性,折叠圆页1v0213完全打
开时通过收纳槽1v0215进行收集。
33.所述定位机构1v03包括负压外环1v031、负压内环1v032、内置连接口1v033、外置吸孔1v034,所述外置吸孔1v034设有两个以上,且呈环形阵列方式分布于定位机构1v03底部,所述定位机构1v03内部上端设有负压外环1v031,所述负压外环1v031顶部与摆动压轴1v0211底部相贴合,所述负压内环1v032通过嵌入方式安装于负压外环1v031内部,所述内置连接口1v033设有两个以上,且均匀等距分布于负压外环1v031、负压内环1v032底部,所述外置吸孔1v034与内置连接口1v033相连通,负压外环1v031与负压内环1v032分为两个吸附直径范围,当双位滑块1v0212转动纵向状态时,摆动压轴1v0211处于负压内环1v032顶部进行下压,使内置连接口1v033与内部范围的外置吸孔1v034连通,在双位滑块1v0212转动横向状态时摆动压轴1v0211则下压负压外环1v031,进而连接外部范围的外置吸孔1v034。
34.所述弧形刮板1v023弧形末端均设有凸位,用于与双位滑块1v0212进行卡合,从而实现同步的联动效果。
35.所述摆动压轴1v0211底部设有滚珠,并且与负压外环1v031、负压内环1v032顶面接触,从而确保在移动过程中提高滑动性,避免阻力。
36.所述负压内环1v032顶部两端均为斜面设计,在摆动压轴1v0211经过时通过斜面进行下压带动,从而确保内置连接口1v033与外置吸孔1v034能够形成负压相通。
37.本发明的原理:将需要抛光的晶片放置在抓取机构1v底部,而后通过控制面板3v启动伺服器2v,进而驱动抛光基座5v进行旋转升降,并对抓取机构1v底部的晶片进行加工,针对不同直径的晶片加工,可以借助调位组件1v02控制定位机构1v03底部的吸附范围,避免吸附范围不均匀造成变形,外环1v022与定位真空轴1v01套合,且内部由密闭机构1v021进行密封,在需要调整时通过刷轮1v024带动弧形刮板1v023与密闭机构1v021形成扣动,使密闭机构1v021展开,进而完成真空负压的连通,通过双位滑块1v0212接触弧形刮板1v023进行联动,转动过程中摆动压轴1v0211同步带动折叠圆页1v0213移动,从而控制固定环1v0214的通畅性,折叠圆页1v0213完全打开时通过收纳槽1v0215进行收集,负压外环1v031与负压内环1v032分为两个吸附直径范围,当双位滑块1v0212转动纵向状态时,摆动压轴1v0211处于负压内环1v032顶部进行下压,使内置连接口1v033与内部范围的外置吸孔1v034连通,在双位滑块1v0212转动横向状态时摆动压轴1v0211则下压负压外环1v031,进而连接外部范围的外置吸孔1v034。
38.本发明解决的问题是目前的机械抛光设备采用负压吸附进行晶片的固定,但由于晶片材料较薄,且变形量大,加工时无法根据晶片的直径进行定位吸附,且吸附力度也无法进行调整,容易造成晶片变形损坏,本发明通过上述部件的互相组合,实现了不同直径范围的外置吸孔变换,以便于根据不同大小的晶片进行局限调整,确保了吸附力度的平均,避免造成晶片变形损坏。
39.以上显示和描述了本发明的基本原理、主要特征和本发明的优点,本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神或基本特征的前提下,不仅能够以其他的具体形式实现本发明,还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围,因此本发明要求保护范围由所附的权利要求书及其等同物界定,而不是上述说明限定。
40.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包
含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1