一种便于加料的信息存储器回收送料装置的制作方法
1.本发明涉及环保回收装置领域,特别涉及一种便于加料的信息存储器回收送料装置。
背景技术:
2.光盘是以光信息做为存储的载体并用来存储数据的一种物品。在传统的机械硬盘中,就是通过光盘作为信息载体。尽管随着固态硬盘的出现,机械硬盘的数量开始减少,但是由于固态硬盘的某些固有优点,如造价成本远低于固态硬盘,机械硬盘仍大量被应用。光盘作为机械硬盘和大量的信息存储媒介,在报废后,对于光盘的信息保密一直被大众所关注。
3.全世界每年有大量的光盘被废弃,对于这些废旧光盘,如何对其存储的信息进行销毁、如何避免废旧光盘造成的二次污染,逐渐被大众所关注。
4.目前对于废旧光盘的处理方法主要是填埋和焚烧,对于信息的处理多是采用破碎的方式进行信息销毁。由于光盘基体材料为聚碳酸酯(pc),其不可降解,填埋和焚烧都会长期残留在土壤中,污染土壤和地下水。
5.而光盘的基体
‑
聚碳酸酯作为全球紧缺材料,价格较高,我国主要依赖进口。而光盘的反射层主要为金、银等贵金属材料,也具有较高的回收价值。
6.在对光盘进行回收利用时,一般采取对反射层和基体进行磨削分离的办法。采用磨削法时,通常需要对对盘片进行单片送料,以便对盘片进行磨削。但是现有的光盘进行存放时均是采用层层堆叠的方式,光盘盘片较薄且表面较为光滑,盘片和盘片之间由于间隙较小,会形成负压,造成送料时盘片和盘片之间粘连,造成单次送料时推送多片光盘,而采用人工送料的方式效率较低,难以实现高效生产。
技术实现要素:
7.本发明提供一种便于加料的信息存储器回收送料装置,可以解决现有技术中对光盘进行送料时,容易存在盘片之间粘连、单次送多片料的问题。
8.一种便于加料的信息存储器回收送料装置,包括:
9.底座;
10.第一挡板和第二挡板,所述第一挡板和所述第二挡板均竖直布置且所述第一挡板和所述第二挡板之间形成一用于容纳光盘的进料通道;
11.送料器,所述送料器整体呈l形结构,其包括依次设置的第一筒体、弧形筒体和第二筒体,所述第一筒体呈竖直布置,所述弧形筒体为四分之一弧形结构,所述第二筒体呈水平布置,所述第一筒体的下端连接至所述弧形筒体的上端,所述弧形筒体的下端连接至所述第二筒体的一端,所述第二筒体远离所述弧形筒体的一端距离所述第二挡板的距离大于等于一个光盘厚度且小于两个光盘厚度;以及,
12.推料器,其包括气缸和推料板,所述气缸固定设置在所述底座上,所述气缸用于带
动所述推料板沿竖直方向移动;所述推料板的厚度小于一个光盘的厚度;所述推料板下移时,用于将光盘推送至进料通道内。
13.更优地,所述第一筒体和所述第二筒体的直径相等,所述弧形筒体的直径大于所述第一筒体和所述第二筒体的直径且等于光盘的外径,所述弧形筒体的最低点较所述第二筒体的最低点高且所述弧形筒体与所述第二筒体之间圆滑过渡。
14.更优地,所述第二挡板上设置有第一限位杆和第二限位杆,所述第一限位杆和所述第二限位杆位于所述第一挡板和所述第二挡板之间;
15.所述第一限位杆和所述第二限位杆呈倒八字形布置,所述第一限位杆和所述第二限位杆的较高的一端均固定连接至所述第二挡板上,所述第一限位杆和所述第二限位杆均为弹性杆;
16.所述第一限位杆和所述第二限位杆至少具有第一工作状态和第二工作状态;
17.当处于第一工作状态时,所述推料板位于所述储料筒上方,所述第一限位杆和所述第二限位杆支撑位于所述第一限位杆和所述第二限位杆上的光盘a,使光盘a保持静止;
18.当处于第二工作状态时,所述推料板下移推动位于光盘a上方的光盘b,位于所述第一限位杆和所述第二限位杆上的光盘a下移,所述第一限位杆和所述第二限位杆弹性变形,用于容纳光盘a通过并回弹支撑光盘b。
19.本发明提供一种便于加料的信息存储器回收送料装置,通过气缸带动推料板移动,而光盘是堆叠放置在第二筒体内,第二筒体的开口端距离第二挡板之间的距离大于一个光盘厚度且小于两个光盘厚度,也即,推料板进行推送时,仅能带动一个光盘移动,而该光盘上面的光盘会受到上料筒的阻碍从而无法移动,而当该光盘被推送后,推料板回退,后方的光盘会在重力的作用下推动光盘至推料板的下方,从而实现单次推送单片的效果;由于第一筒体呈竖直状态,第一筒体上端开口,方便进行补充光盘,无需停机。
附图说明
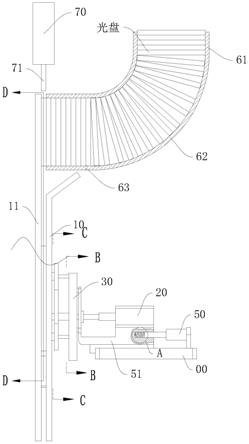
20.图1为本发明提供的一种便于加料的信息存储器回收送料装置的结构示意图;
21.图2为第一限位杆和第二限位杆的工作状态示意图一(图1中d
‑
d剖视图);
22.图3为第一限位杆和第二限位杆的工作状态示意图二(图1中d
‑
d剖视图);
23.图4为第一限位杆和第二限位杆的工作状态示意图三(图1中d
‑
d剖视图);
24.图5为图1中刮削装置的结构示意图一;
25.图6为图1中刮削装置的结构示意图二(隐藏第一挡板);
26.图7为限位装置的工作状态示意图;
27.图8为刮削装置和驱动装置的结构示意图一;
28.图9为刮削装置和驱动装置的结构示意图二;
29.图10为驱动轴和顶柱的安装结构示意图;
30.图11为图8的主视图;
31.图12为图11中a处局部放大图;
32.图13为图11中c
‑
c剖视图;
33.图14为图11中b
‑
b剖视图;
34.图15为刮削装置的系统原理图;
35.图16为外齿圈和刮刀的安装结构示意图;
36.图17为刮板和刮刀的安装结构示意图。
37.附图标记说明:
38.00底座;10第一挡板;11第二挡板;111第一限位杆;112第二限位杆;12限位电机;13档杆;20驱动电机;21驱动轴;30外齿圈;31行星轮;32行星架;33太阳轮;40过渡齿轮;41驱动齿轮;42刮板;43顶柱;50电动伸缩杆;51滑座;60储料筒;601加料孔;61顶板;611拉杆;62弹簧;70气缸;71推料板。
具体实施方式
39.下面结合附图,对本发明的一个具体实施方式进行详细描述,但应当理解本发明的保护范围并不受具体实施方式的限制。
40.实施例一:
41.一种便于加料的信息存储器回收送料装置,包括:
42.底座00;
43.第一挡板10和第二挡板11,第一挡板10和第二挡板11均竖直布置且第一挡板10和第二挡板11之间形成一用于容纳光盘的进料通道;
44.送料器,送料器整体呈l形结构,其包括依次设置的第一筒体61、弧形筒体62和第二筒体63,第一筒体61呈竖直布置,弧形筒体62为四分之一弧形结构,第二筒体63呈水平布置,第一筒体61的下端连接至弧形筒体62的上端,弧形筒体62的下端连接至第二筒体63的一端,第二筒体63远离弧形筒体62的一端距离第二挡板11的距离大于等于一个光盘厚度且小于两个光盘厚度;以及,
45.推料器,其包括气缸70和推料板71,气缸70固定设置在底座00上,气缸70用于带动推料板71沿竖直方向移动;推料板71的厚度小于一个光盘的厚度;推料板71下移时,用于将光盘推送至进料通道内。
46.工作时,将光盘放入第一筒体61,光盘在重力作用下滑落,并且在弧形筒体62的导向作用下,产生90
°
偏转,实现了换向;位于弧形筒体62和第一筒体61内的光盘会给位于第二筒体63内的光盘以压力,因此第二筒体63内的光盘会被带动从第二筒体63的开口端露出抵靠在第二挡板11上。气缸70启动带动推料板71下移,推料板71下移时推动光盘下移。补料时,只需直接将光盘放入第一筒体61内即可,方便随时补料。
47.实施例二:
48.在实施例一中,光盘在滑动过程中,由于摩擦力的存在,会使光盘上部和下部的运动速度不同,从而造成光盘在弧形筒体62的部分卡死,为了避免这一问题,本实施例中,第一筒体61和第二筒体63的直径相等且等于光盘的外径,弧形筒体62的直径大于第一筒体61和第二筒体63的直径,弧形筒体62的最低点较第二筒体63的最低点高且弧形筒体62与第二筒体63之间圆滑过渡。由于第一筒体61和第二筒体63为标准圆柱,不易产生卡死,而弧形筒体62为弧形结构,当弧形筒体62的直径与光盘的外径相同时,容易卡死。而本实施例中,弧形筒体62的外径大于光盘的外径,则光盘在弧形筒体62内时可以具有较大的活动空间,不易卡死,而弧形筒体62的下端最低点高于第二筒体63的最低点,避免光盘在由弧形筒体62滑动至第二筒体63时受阻。
49.实施例三:
50.在实施例一和实施例二中,光盘依靠摩擦力进行夹紧。但是在推料板71回退、顶板61推送光盘的过程中,有短暂的时间光盘处于“悬空”状态,即光盘在即将与第二挡板11接触且已经与储料筒60脱离时,处于无支撑状态,此过程若弹簧62弹力不足或光盘倾斜导致顶板61的运动速度降低,以及光盘表面粘有油污导致摩擦力降低时,均可能造成光盘不受控的掉落,造成非正常落料。
51.为了防止光盘的非正常落料,影响后续的工序,本实施例中,如图2至图4所示,第二挡板11上设置有第一限位杆111和第二限位杆112,第一限位杆111和第二限位杆112位于第一挡板10和第二挡板11之间;
52.第一限位杆111和第二限位杆112呈倒八字形布置,第一限位杆111和第二限位杆112的较高的一端均固定连接至第二挡板11上,第一限位杆111和第二限位杆112均为弹性杆;
53.第一限位杆111和第二限位杆112至少具有第一工作状态和第二工作状态;
54.当处于第一工作状态时,推料板71位于储料筒60上方,第一限位杆111和第二限位杆112支撑位于第一限位杆111和第二限位杆112上的光盘a,使光盘a保持静止;
55.当处于第二工作状态时,推料板71下移推动位于光盘a上方的光盘b,位于第一限位杆111和第二限位杆112上的光盘a下移,第一限位杆111和第二限位杆112弹性变形,用于容纳光盘a通过并回弹支撑光盘b。
56.如图2所示,在推料板71未推料时,也即推料板71位于储料筒60上方时,第一限位杆111和第二限位杆112支撑位于下方的光盘,光盘不会掉落;
57.如图3所示,当推料板71下移推料时,挤压位于上侧的光盘,上侧的光盘挤压下侧的光盘,光盘受到外力挤压第一限位杆111和第二限位杆112,第一限位杆111和第二限位杆112产生变形,向两侧扩张,使第一限位杆111和第二限位杆112之间的间距变大;
58.如图4所示,当位于下侧的光盘继续下移,第一限位杆111和第二限位杆112无法支撑时,位于下侧的光盘掉落,第一限位杆111和第二限位杆112快速回弹,重新支撑位于上侧的光盘,从而使推料板71每次推料仅能推送一个光盘掉落,避免光盘的非正常掉落造成工作故障。
59.实施例四:
60.如图5至图6所示,一种对上述实施例输送后的光盘进行回收处理的回收装置,用于对光盘进行刮削,包括:
61.滑座51;
62.刮削装置,其包括外齿圈30、太阳轮33、行星架32、顶柱43和三个行星轮31,外齿圈30可转动地设置在滑座51上,(为了便于展示结构,图中对部分壳体予以了隐藏),行星架32固定设置在滑座51上,三个行星轮31周向均匀地布置在太阳轮33的周侧,太阳轮33与行星轮31相配合,行星轮31与外齿圈30相配合,行星轮31可转动地设置在行星架32上,上述太阳轮33、外齿圈30、行星架32和三个行星轮31共同构成一行星减速结构;顶柱43同轴可转动地设置在太阳轮33上,如图10所示,顶柱43可采用图10所示的结构,也即驱动电机20的输出轴穿过太阳轮33延伸连接至顶柱43,顶柱43上开设有一t形槽,输出轴的端部设置有一t形块,t形块可转动地设置在t形槽内;也可通过圆锥滚子轴承将输出轴转动连接在顶柱43上,只
要实现顶柱43能够沿输出轴的轴心线转动而不能沿输出轴的延伸方向移动即可。其中,顶柱43可采用橡胶材料制成,或其他具有一定弹性变形能力的材料均可。
63.驱动装置,设置在滑座51上,用于驱动太阳轮33转动;其中,
64.外齿圈30上设置有用于刮削光盘表面的刮刀。
65.驱动装置为驱动电机20,刮刀为片状,刮刀垂直于外齿圈30所形成的平面布置,刮刀的延伸方向与外齿圈30的半径相重合。
66.工作时,将顶柱43抵紧在光盘的中心部(光盘的中心部不具有反射层),当顶柱43抵紧光盘时,光盘和顶柱43不发生转动。启动驱动电机20,驱动电机20通过驱动轴21带动太阳轮33转动,太阳轮33通过行星轮31带动外齿圈30转动,由于顶柱43将光盘抵紧,且顶柱43和驱动轴21可转动连接,因此驱动轴21转动时,顶柱43和光盘不会发生转动,而外齿圈30沿驱动轴21为转动中心发生转动,从而外齿圈30带动刮刀在光盘表面刮削,将反射层与基层相脱离。
67.实施例五:
68.在实施例五的基础上,由于刮削时,一般需要高速旋转进行刮削,速度较低会导致切削力的增加、温度的快速提升以及表面粗糙度的降低。刮刀加工一圈需要旋转一整周(也即360
°
),也即需要外齿圈30旋转一整周,而外齿圈30转速较低、不易于实现高度刮削且加工效率较低。如图8、图9、图11、图13和图14所示,为了在不降低切削速率的情况下提升加工效率,刮削装置还包括驱动齿轮41、若干过渡齿轮40和圆形的刮板42,刮板42与过渡齿轮40一一对应,顶柱43位于驱动齿轮41远离太阳轮33的一侧,每个刮板42上均设置有刮刀;
69.驱动齿轮41同轴固定设置在太阳轮33上,过渡齿轮40可转动地设置在外齿圈30上,若干过渡齿轮40周向均匀地设置在驱动齿轮41的周侧,过渡齿轮40与驱动齿轮41相配合;刮板42同轴固定设置在过渡齿轮40上,刮板42位于过渡齿轮40远离外齿圈30的一侧。
70.工作时,驱动电机20带动太阳轮33转动,太阳轮33转动时,带动驱动齿轮41和行星轮31转动,行星轮31转动带动外齿圈30转动,同时驱动齿轮41转动会带动过渡齿轮40转动,而过渡齿轮40可转动地设置在外齿圈30上,因此过渡齿轮40会产生高速自转且速度较低的以驱动齿轮41为中心的公转。刮板42自转可保持较高的刮削速度,而如果刮板42仅自转,则会造成相邻的两个刮板42之间形成的间隙无法进行刮削,而刮板42的公转则解决了这一问题,且此时由于刮板42可设置为多个,本实施例中以三个为例,则此时外齿圈30仅需转动一个较小的角度(小于360
°
)即可将整个反射层刮削完毕,在保持了较高的刮削速度的同时,提高了加工效率。
71.实施例六:
72.在实施例四或五的基础上,如图7和图11所示,为了方便对光盘进行送料、定位和落料,本实施例还包括第一挡板10、第二挡板11和两个限位装置,两个限位装置关于刮削装置对称布置;
73.第一挡板10和第二挡板11之间具有一用于容纳光盘的收纳空间,第一挡板10上开设有一让位孔,用于容纳刮削装置通过;
74.限位装置包括限位电机12和档杆13,限位电机12固定设置在第二挡板11上,档杆13可转动地设置在第二挡板11上,限位电机12用于带动档杆13转动;
75.两个档杆13至少具有第一工作状态和第二工作状态;
76.当处于第一工作状态时,两个档杆13呈倒八字形布置,两个档杆13支撑光盘;
77.当处于第二工作状态时,两个档杆13均呈竖直状态,光盘可以从两个档杆13之间通过。
78.工作时,只需通过送料装置将光盘送入第一挡板10和第二挡板11之间,光盘在重力作用下下落,掉落到两个档杆13上,如图3所示,此时档杆13处于第一工作状态,两个倒八字形布置的档杆13将光盘支撑,由于光盘呈圆形,因此光盘在两个档杆13的支撑下实现自定心,且由于第一挡板10和第二挡板11的作用,光盘实现竖直定位。
79.实施例七:
80.在实施例四至六的基础上,尽管光盘的厚度有标准尺寸,但是一方面光盘的厚度有允许偏差,且cd光盘厚度一般为1.2mm厚,但是dvd光盘的基板厚度为0.6mm即可,虽然0.6mm的厚度太薄,其制造出来的光盘也会因为太薄而容易折断,一般多采用将两片0.6mm叠在一起组成1.2mm厚,但是一些劣质dvd光盘会对基层偷工减料,仅采用单片基层,造成光盘实际厚度达不到标准的1.2mm厚;另外,光盘表面的印刷层采用不同的印刷方式(贴纸或喷涂)都会造成光盘整体厚度的不同,而当顶柱43的位置固定,光盘突然变薄后,无法实现夹紧且刮刀无法有效接触反射层。由于在刮刀接触反射层后,即需进行刮削(反射层较薄),因此需要在刮刀到位后(位置根据光盘的实际厚度呈随机分布)即开始刮削,为了实现这一目的,在本实施例中,如图11、图12和图15所示,还包括底座00、电动伸缩杆50、弹簧60、行程开关61和处理器;
81.滑座51可滑动地设置在底座00上,滑座51上开设有一收纳孔,行程开关61固定设置在收纳孔内,弹簧60一端固定连接在收纳孔内、另一端固定连接至电动伸缩杆50的输出端,电动伸缩杆50的输出端可滑动地设置在收纳孔内;
82.行程开关61、电动伸缩杆50、驱动电机20和限位电机12均信号连接至处理器。
83.工作时,待光盘送入第一挡板10和第二挡板11之间,处理器控制电动伸缩杆50伸长,在刮板42接触到光盘之前,由于弹簧60的存在,电动伸缩杆50会推动滑座51在底座00上滑移,直至刮刀接触到光盘(此时顶柱43也抵紧光盘的中心孔的位置),刮板42受到阻力,传递至滑座51,滑座51不再移动,此时电动伸缩杆50继续伸长,弹簧60压缩,电动伸缩杆50的前端抵触行程开关61,行程开关61向处理器发送信号,处理器接收信号,控制驱动电机20转动,待驱动电机20(可采用伺服电机)转动预设圈数或时间,将光盘反射层刮削完毕,处理器控制电动伸缩杆50回缩至初始位置,而后处理器控制限位电机12转动,限位电机12带动档杆13转动到第二工作状态,两个档杆13之间所形成的间隙大于光盘的外径,且顶柱43回退后,光盘失去支撑,在重力作用下光盘实现掉落,而后处理器控制限位电机12转动至初始位置,进入下一工作循环。
84.以上公开的仅为本发明的几个具体实施例,但是,本发明实施例并非局限于此,任何本领域的技术人员能思之的变化都应落入本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1